
一种气囊式柑橘采摘机械手末端执行器.pdf

论文****可爱

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种气囊式柑橘采摘机械手末端执行器.pdf
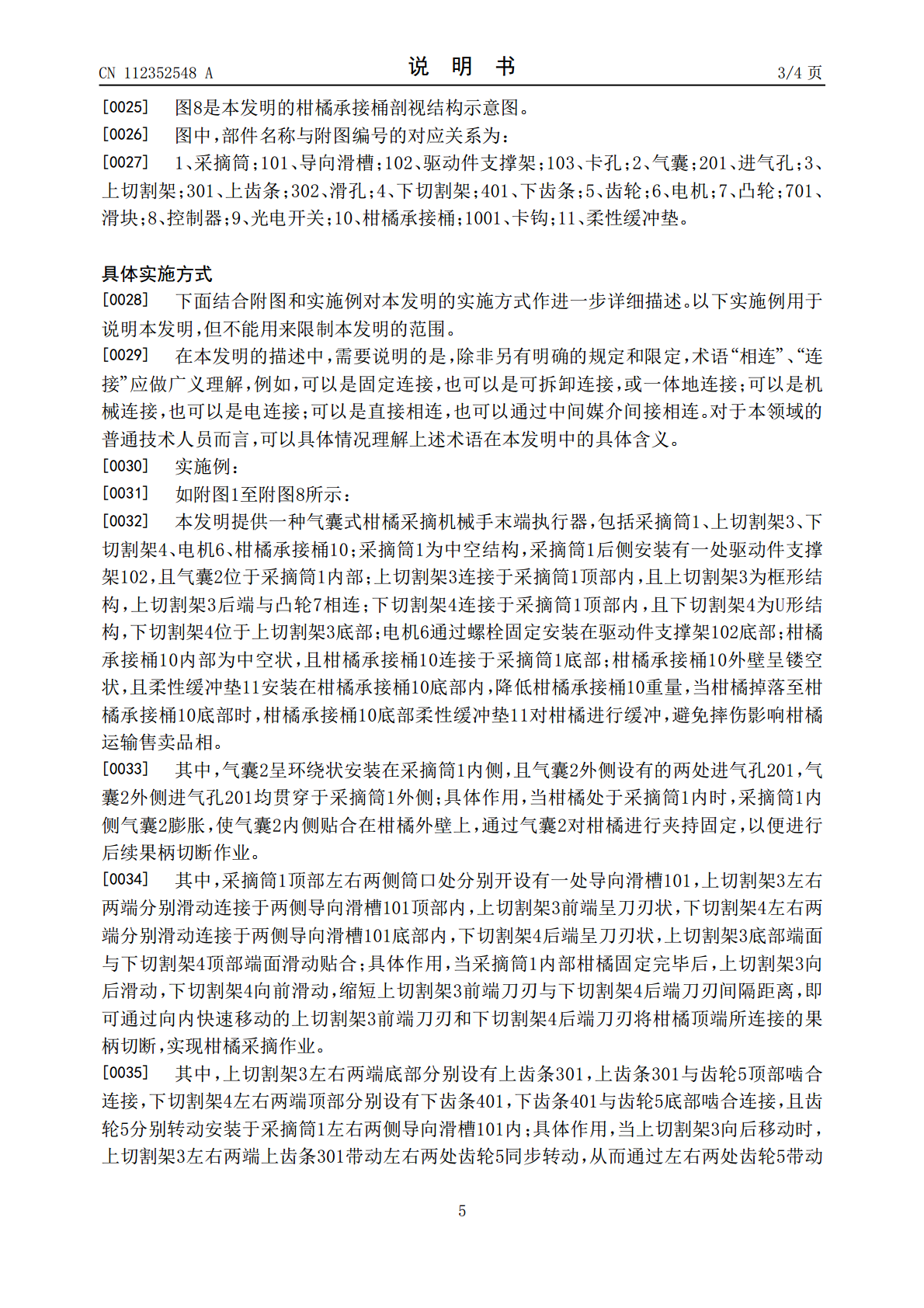
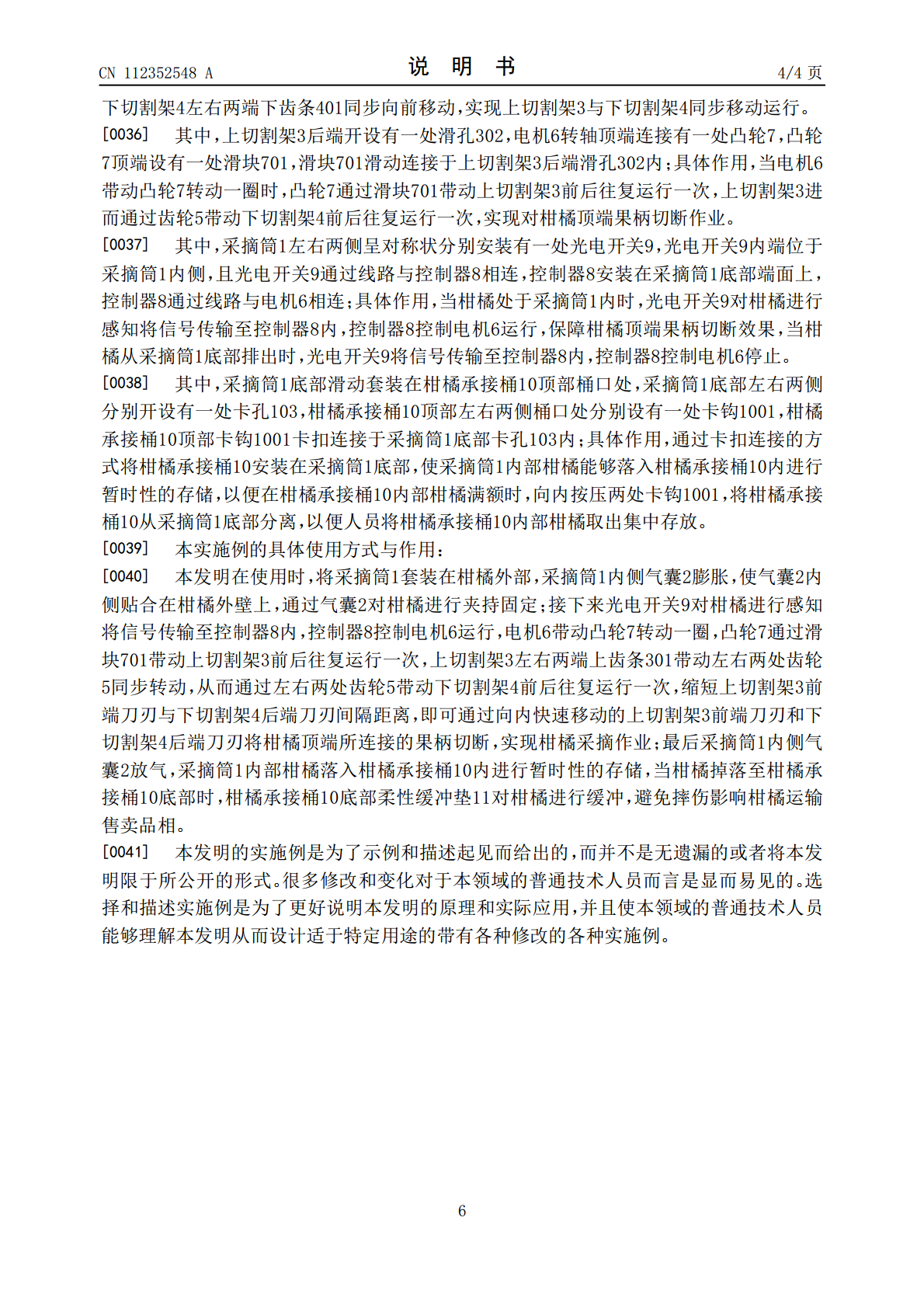
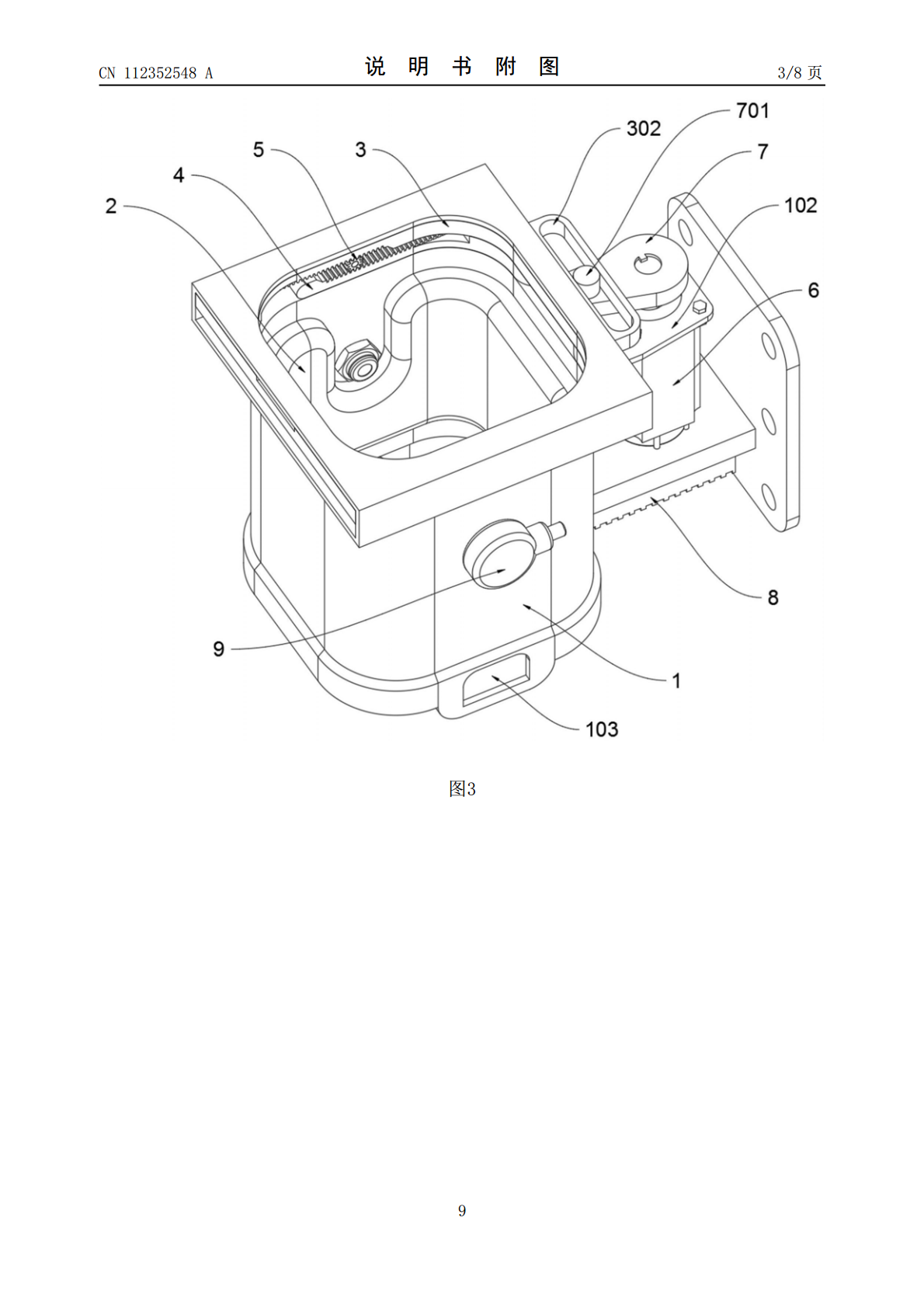
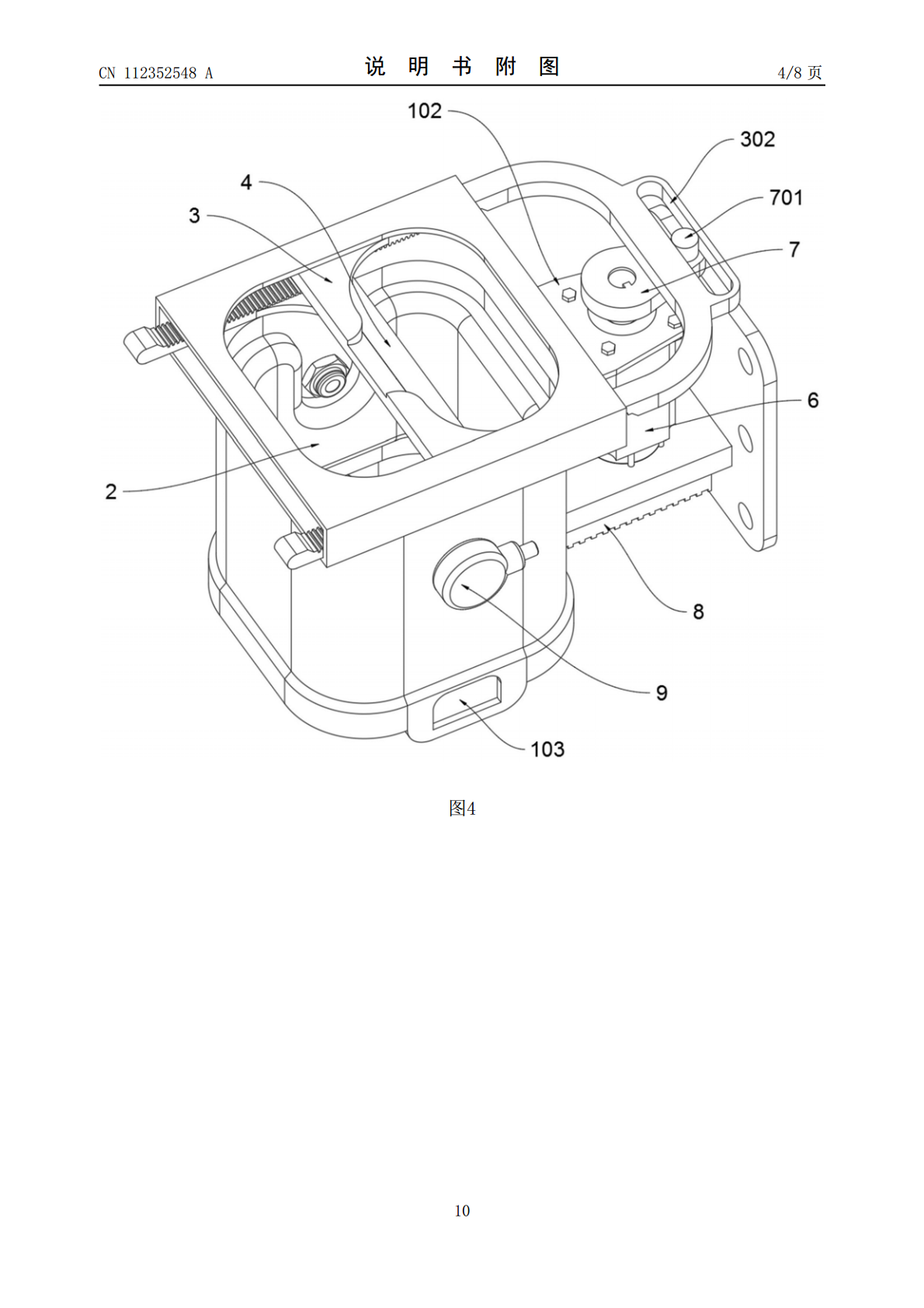
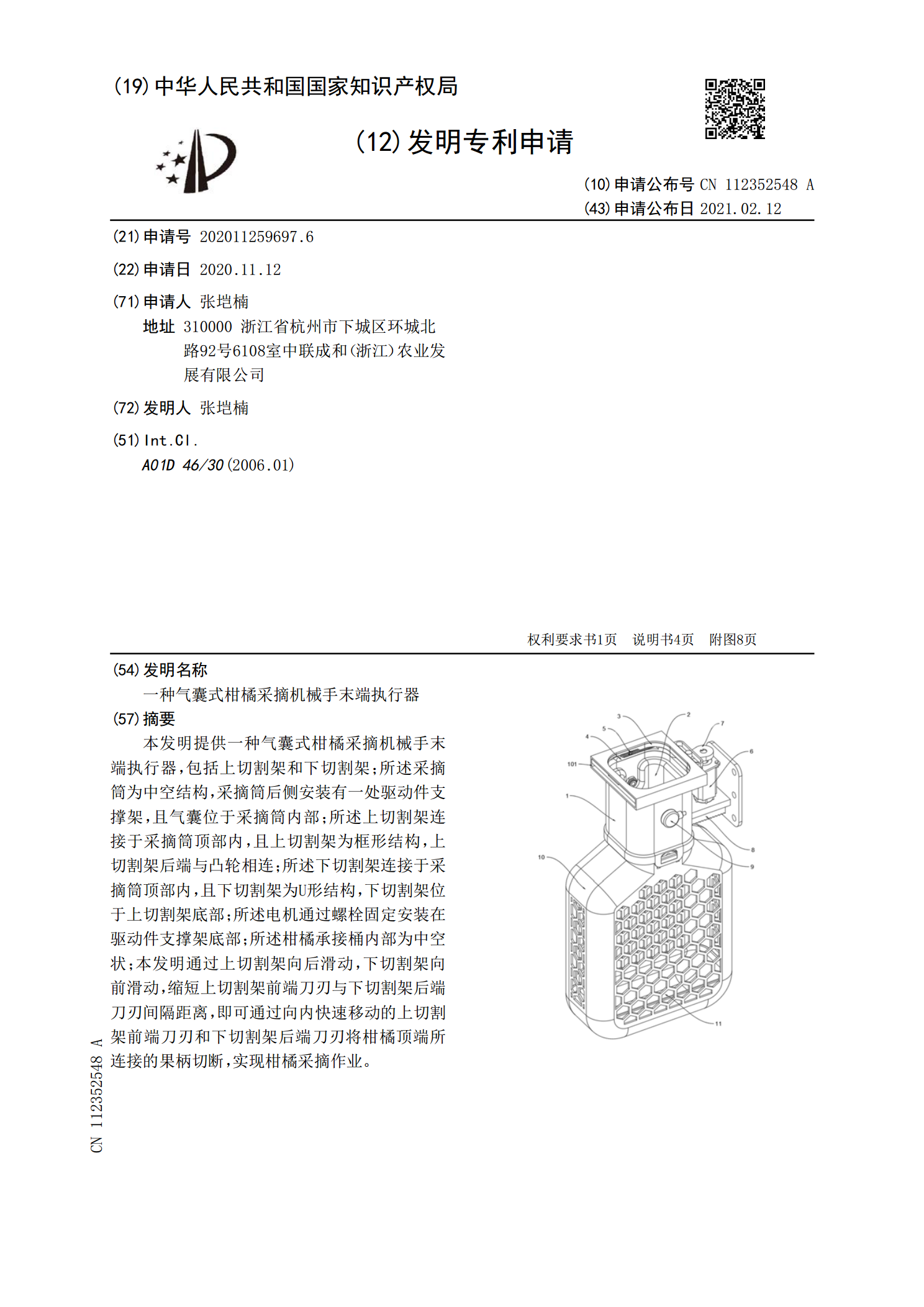
本发明提供一种气囊式柑橘采摘机械手末端执行器,包括上切割架和下切割架;所述采摘筒为中空结构,采摘筒后侧安装有一处驱动件支撑架,且气囊位于采摘筒内部;所述上切割架连接于采摘筒顶部内,且上切割架为框形结构,上切割架后端与凸轮相连;所述下切割架连接于采摘筒顶部内,且下切割架为U形结构,下切割架位于上切割架底部;所述电机通过螺栓固定安装在驱动件支撑架底部;所述柑橘承接桶内部为中空状;本发明通过上切割架向后滑动,下切割架向前滑动,缩短上切割架前端刀刃与下切割架后端刀刃间隔距离,即可通过向内快速移动的上切割架前端刀刃
一种柑橘采摘人体辅助末端执行器.pdf
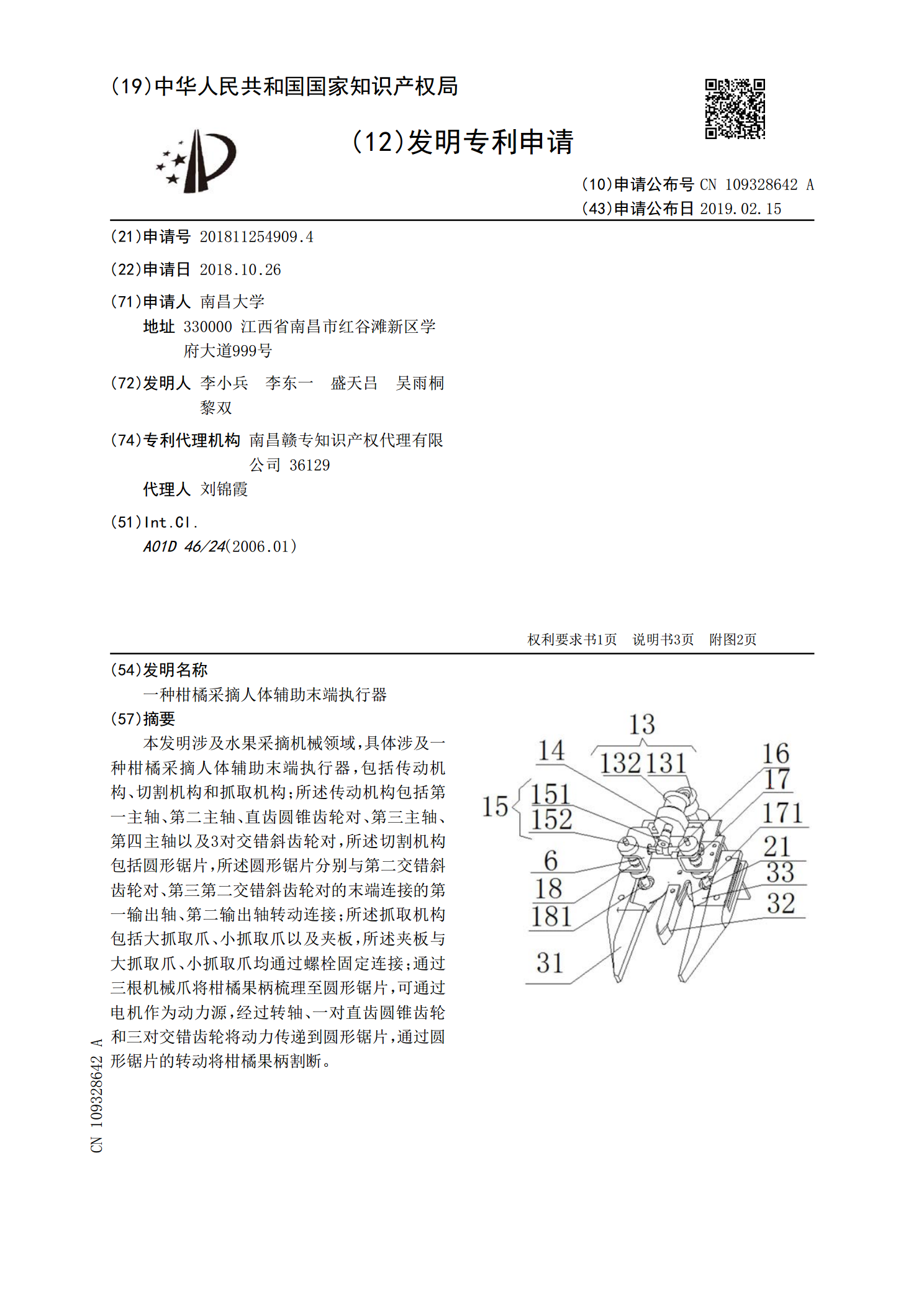
本发明涉及水果采摘机械领域,具体涉及一种柑橘采摘人体辅助末端执行器,包括传动机构、切割机构和抓取机构;所述传动机构包括第一主轴、第二主轴、直齿圆锥齿轮对、第三主轴、第四主轴以及3对交错斜齿轮对,所述切割机构包括圆形锯片,所述圆形锯片分别与第二交错斜齿轮对、第三第二交错斜齿轮对的末端连接的第一输出轴、第二输出轴转动连接;所述抓取机构包括大抓取爪、小抓取爪以及夹板,所述夹板与大抓取爪、小抓取爪均通过螺栓固定连接;通过三根机械爪将柑橘果柄梳理至圆形锯片,可通过电机作为动力源,经过转轴、一对直齿圆锥齿轮和三对交错
一种柑橘采摘机器人的末端执行器.pdf
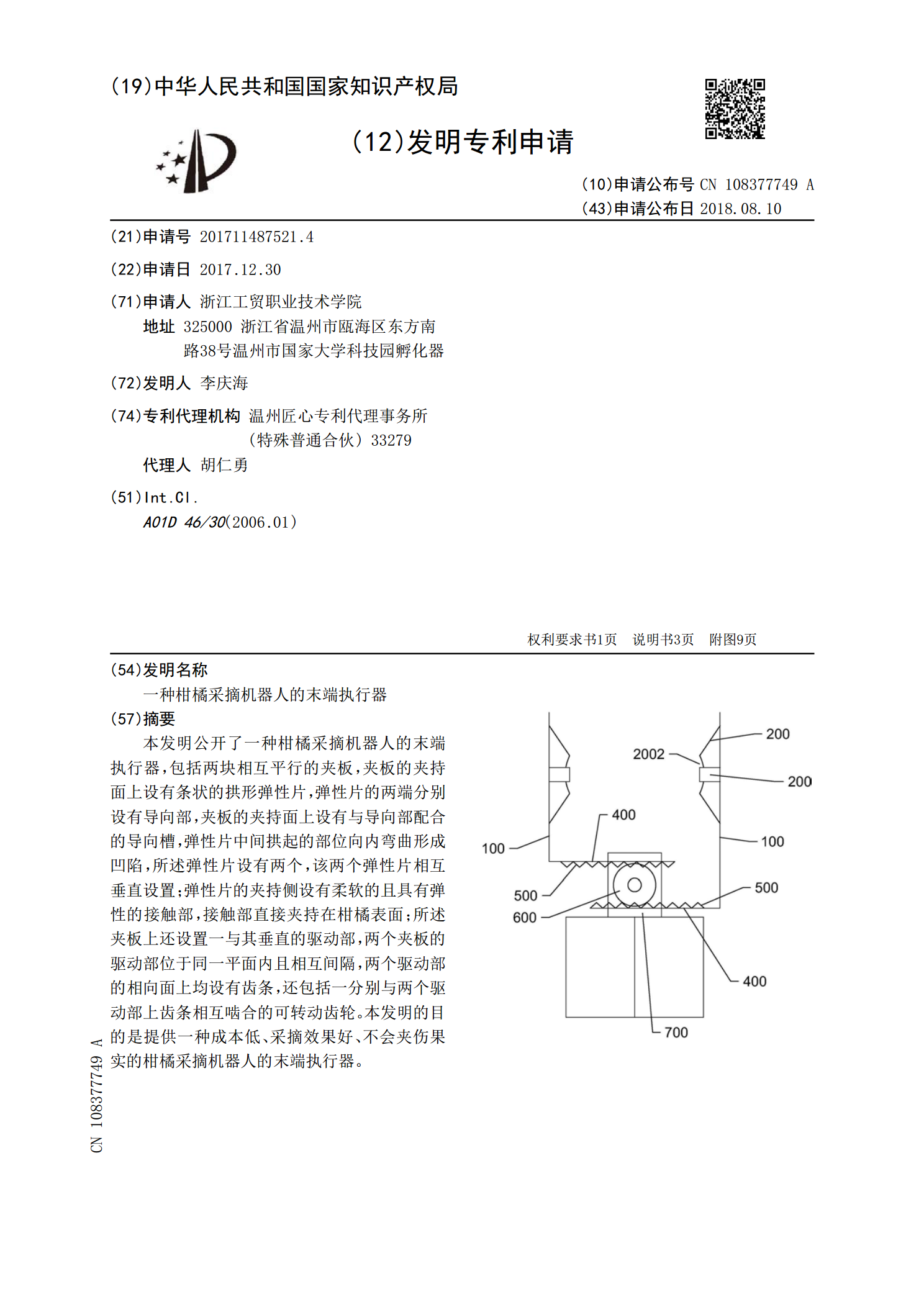
本发明公开了一种柑橘采摘机器人的末端执行器,包括两块相互平行的夹板,夹板的夹持面上设有条状的拱形弹性片,弹性片的两端分别设有导向部,夹板的夹持面上设有与导向部配合的导向槽,弹性片中间拱起的部位向内弯曲形成凹陷,所述弹性片设有两个,该两个弹性片相互垂直设置;弹性片的夹持侧设有柔软的且具有弹性的接触部,接触部直接夹持在柑橘表面;所述夹板上还设置一与其垂直的驱动部,两个夹板的驱动部位于同一平面内且相互间隔,两个驱动部的相向面上均设有齿条,还包括一分别与两个驱动部上齿条相互啮合的可转动齿轮。本发明的目的是提供一种
一种欠驱动采摘机械手末端执行器及采摘方法.pdf
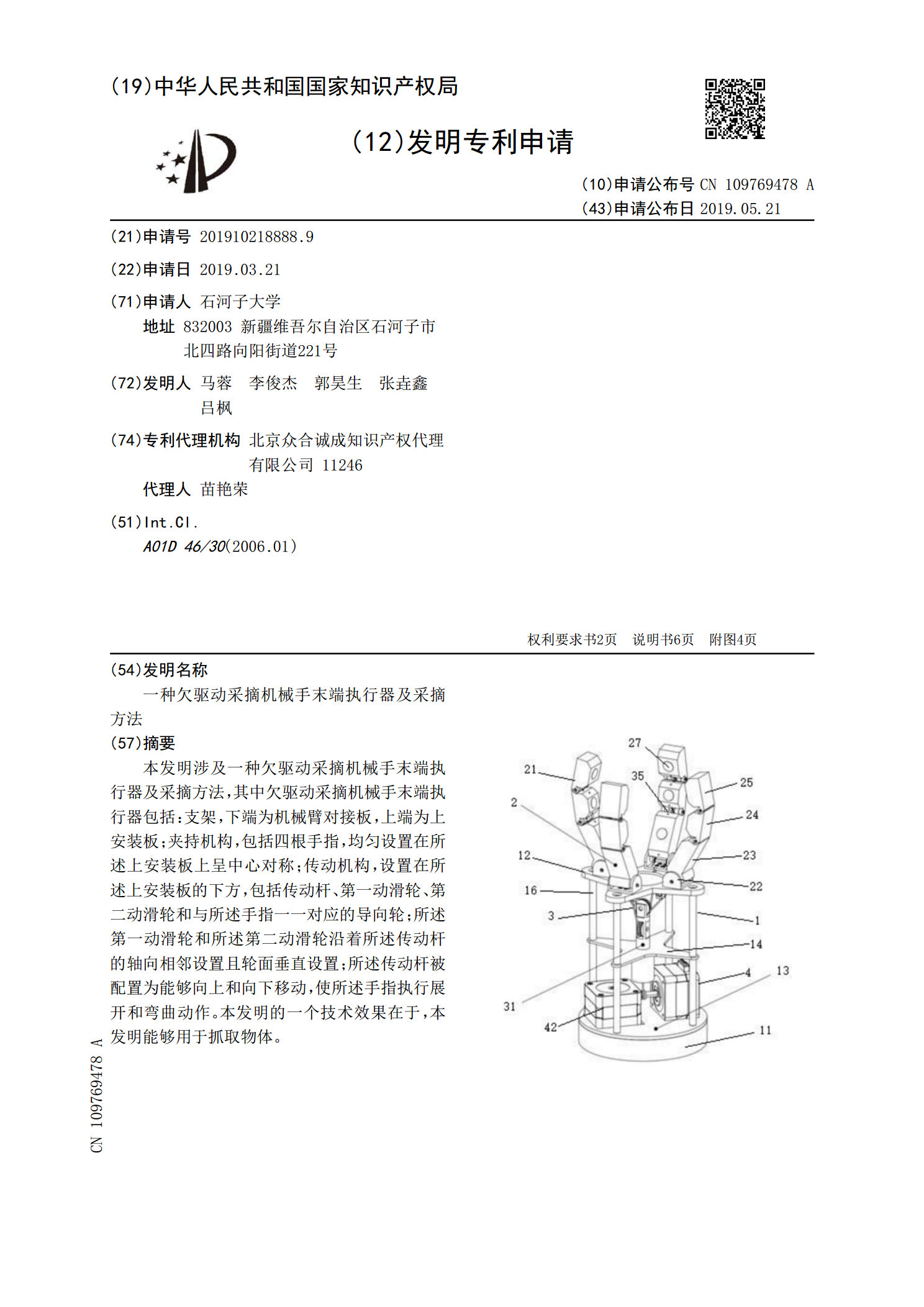
本发明涉及一种欠驱动采摘机械手末端执行器及采摘方法,其中欠驱动采摘机械手末端执行器包括:支架,下端为机械臂对接板,上端为上安装板;夹持机构,包括四根手指,均匀设置在所述上安装板上呈中心对称;传动机构,设置在所述上安装板的下方,包括传动杆、第一动滑轮、第二动滑轮和与所述手指一一对应的导向轮;所述第一动滑轮和所述第二动滑轮沿着所述传动杆的轴向相邻设置且轮面垂直设置;所述传动杆被配置为能够向上和向下移动,使所述手指执行展开和弯曲动作。本发明的一个技术效果在于,本发明能够用于抓取物体。

欠驱动采摘机械手末端执行器装置.pdf
本发明公开了一种欠驱动采摘机械手末端执行器装置。包括结构相同的三个手指,传动机构,三块接触板,三根连杆,驱动杆和转动盘;每个手指具有三个关节,手指第一关节的一端均匀安装在转动盘上,每个手指都装有接触板。具体工作原理是:驱动杆在电机的驱动下移动,通过连杆带动3个手指相向运动闭拢,当手指上的接触板接触到果蔬时,果蔬会推动接触板滑动,驱动手指第二关节内部不完全齿轮运动,与之啮合的齿轮带动手指第三关节运动,接触板表面的力传感器测试到预定的抓取力时,将信号反馈给电机,控制驱动杆停止移动,电机再驱动转动盘转动,实现果