
一种果实采摘机器人末端执行器.pdf

书生****aa


1/6
2/6

3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种果实采摘机器人末端执行器.pdf
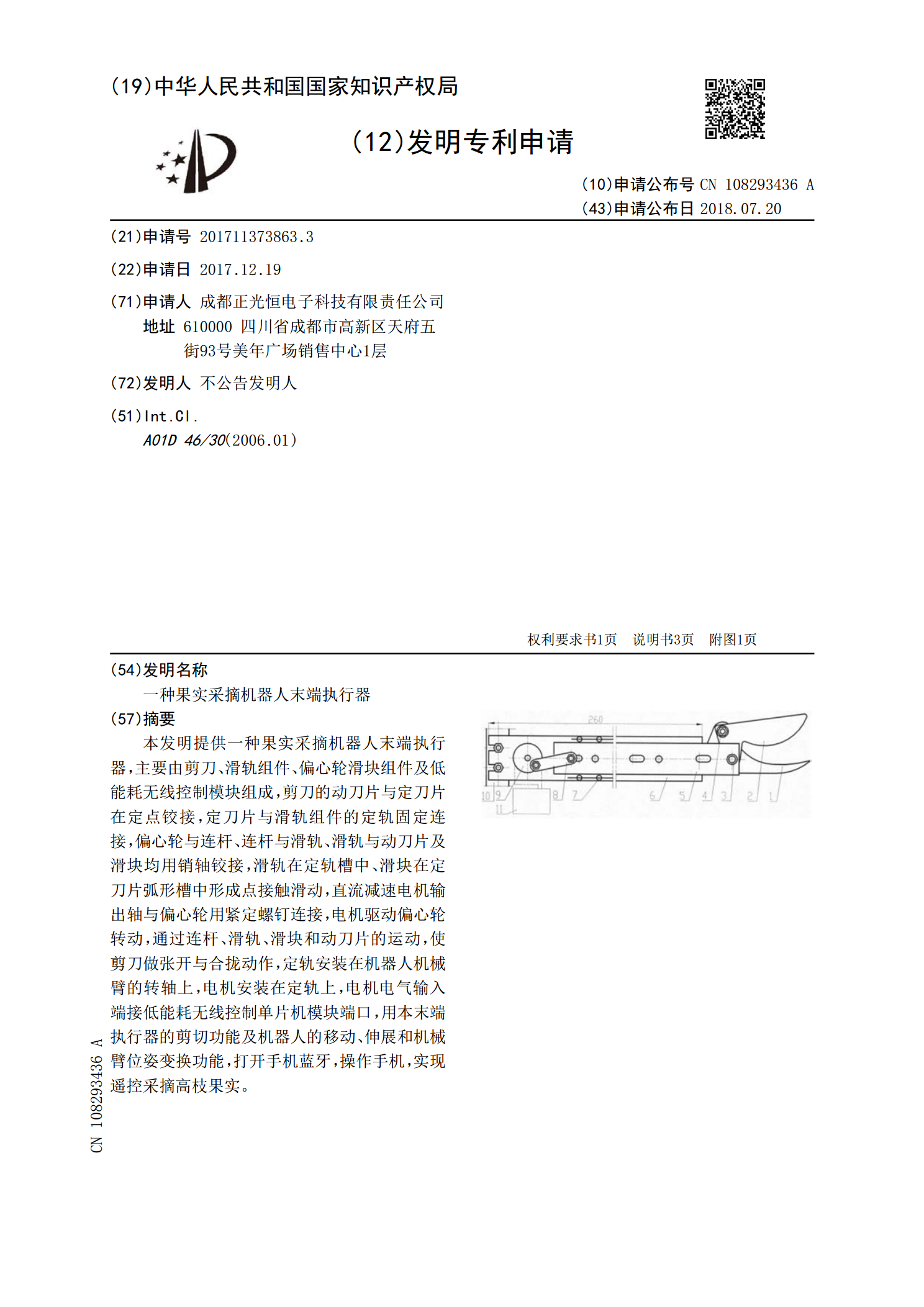
本发明提供一种果实采摘机器人末端执行器,主要由剪刀、滑轨组件、偏心轮滑块组件及低能耗无线控制模块组成,剪刀的动刀片与定刀片在定点铰接,定刀片与滑轨组件的定轨固定连接,偏心轮与连杆、连杆与滑轨、滑轨与动刀片及滑块均用销轴铰接,滑轨在定轨槽中、滑块在定刀片弧形槽中形成点接触滑动,直流减速电机输出轴与偏心轮用紧定螺钉连接,电机驱动偏心轮转动,通过连杆、滑轨、滑块和动刀片的运动,使剪刀做张开与合拢动作,定轨安装在机器人机械臂的转轴上,电机安装在定轨上,电机电气输入端接低能耗无线控制单片机模块端口,用本末端执行器的
一种果实采摘机器人末端执行器.pdf
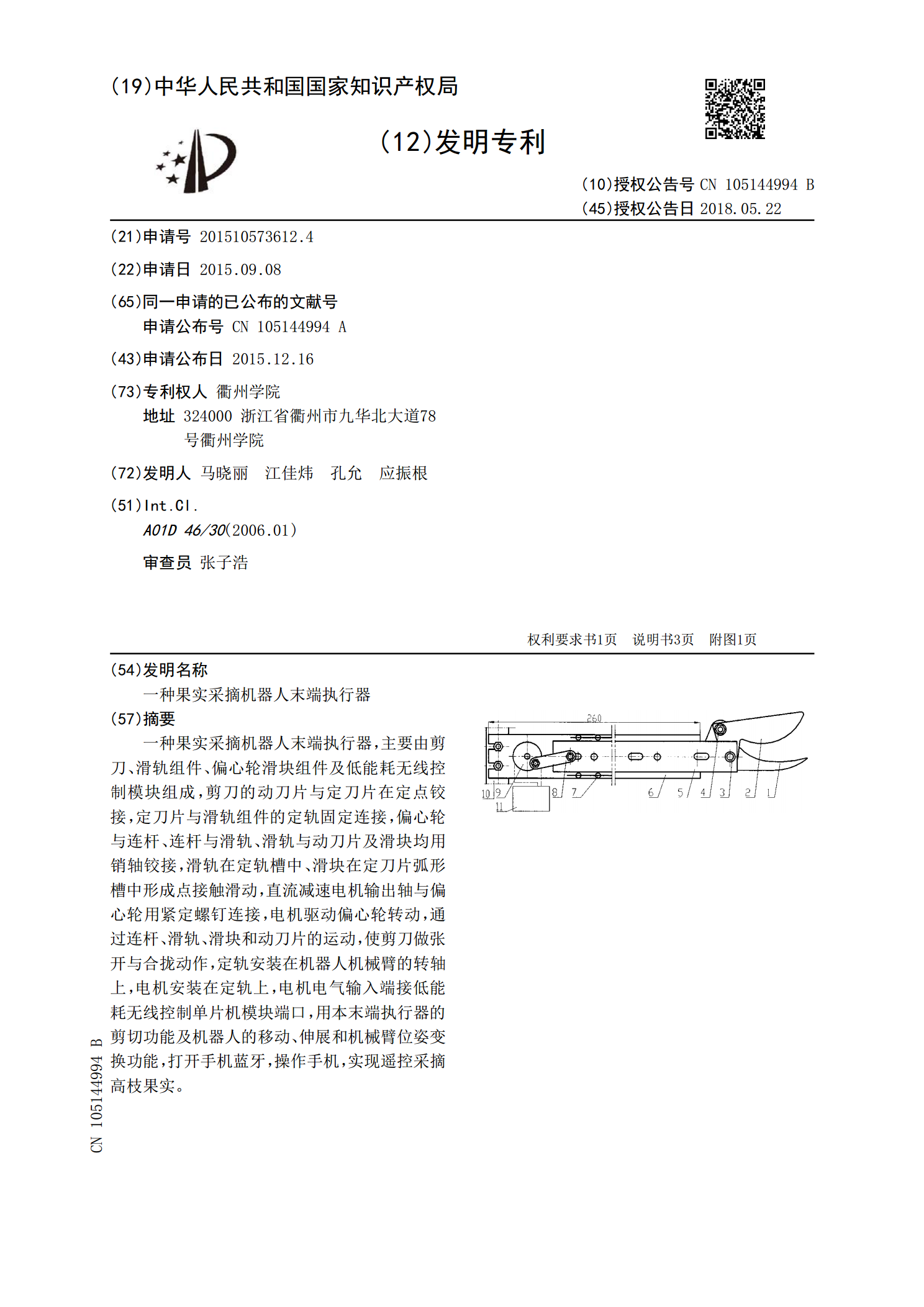
一种果实采摘机器人末端执行器,主要由剪刀、滑轨组件、偏心轮滑块组件及低能耗无线控制模块组成,剪刀的动刀片与定刀片在定点铰接,定刀片与滑轨组件的定轨固定连接,偏心轮与连杆、连杆与滑轨、滑轨与动刀片及滑块均用销轴铰接,滑轨在定轨槽中、滑块在定刀片弧形槽中形成点接触滑动,直流减速电机输出轴与偏心轮用紧定螺钉连接,电机驱动偏心轮转动,通过连杆、滑轨、滑块和动刀片的运动,使剪刀做张开与合拢动作,定轨安装在机器人机械臂的转轴上,电机安装在定轨上,电机电气输入端接低能耗无线控制单片机模块端口,用本末端执行器的剪切功能及

一种用于果实采摘机器人的末端执行器.pdf
本发明提供一种用于果实采摘机器人的末端执行器,包括固定底座、腕部翻转机构、俯仰机构、切割机构,腕部翻转机构同轴套接在固定底座上,固定底座一侧固定齿轮,腕部翻转机构上安装腕部翻转电机,驱动与固定底座上的齿轮相啮合的齿轮转动,腕部翻转机构上固联一侧板,用于支撑俯仰机构,侧板上固定俯仰电机,俯仰机构包括一平面连杆四杆机构,俯仰电机驱动其中一连杆转动,带动与另一连杆固联的俯仰平板转动,切割机构固定在俯仰平板上,切割机构包括通过同步带连接的锯片驱动电机与锯片转轴,锯片驱动电机转动通过同步带传递至锯片转轴,带动固定在
一种果实采摘末端执行器.pdf
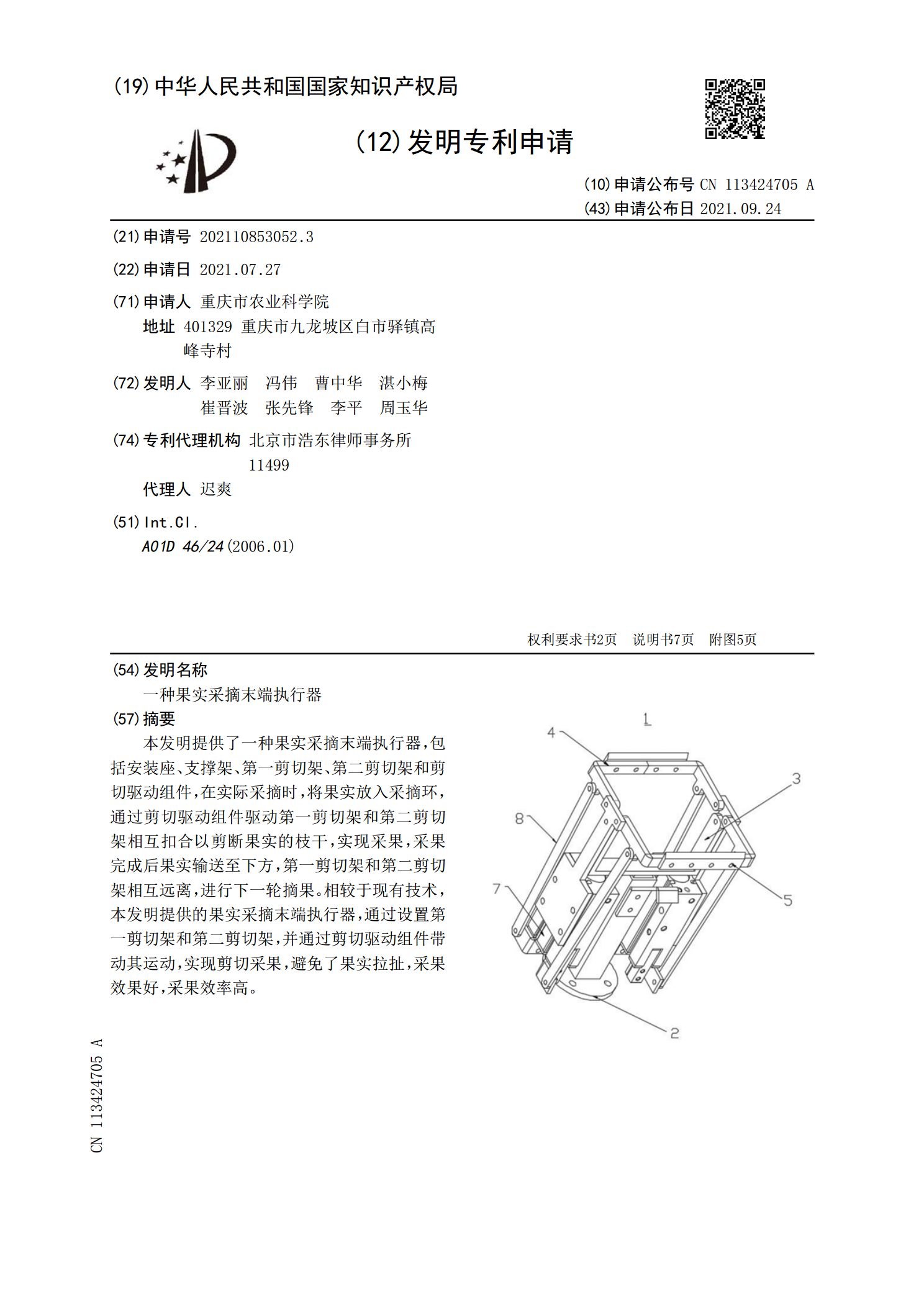
本发明提供了一种果实采摘末端执行器,包括安装座、支撑架、第一剪切架、第二剪切架和剪切驱动组件,在实际采摘时,将果实放入采摘环,通过剪切驱动组件驱动第一剪切架和第二剪切架相互扣合以剪断果实的枝干,实现采果,采果完成后果实输送至下方,第一剪切架和第二剪切架相互远离,进行下一轮摘果。相较于现有技术,本发明提供的果实采摘末端执行器,通过设置第一剪切架和第二剪切架,并通过剪切驱动组件带动其运动,实现剪切采果,避免了果实拉扯,采果效果好,采果效率高。
果实采摘机器人末端执行器的柔顺控制研究.pptx
汇报人:目录PARTONEPARTTWO研究背景研究意义研究目的PARTTHREE机器人技术概述柔顺控制理论及应用末端执行器技术现状PARTFOUR设计思路与原则结构设计材料选择与制作工艺性能测试与优化PARTFIVE控制算法设计算法实现与优化实验验证与结果分析PARTSIX应用场景分析采摘效果评估经济效益与社会效益分析PARTSEVEN研究成果总结未来研究方向与展望THANKYOU