
一种双目视觉引导机器人快速抓取方法、装置及存储介质.pdf

小长****6淑

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双目视觉引导机器人快速抓取方法、装置及存储介质.pdf
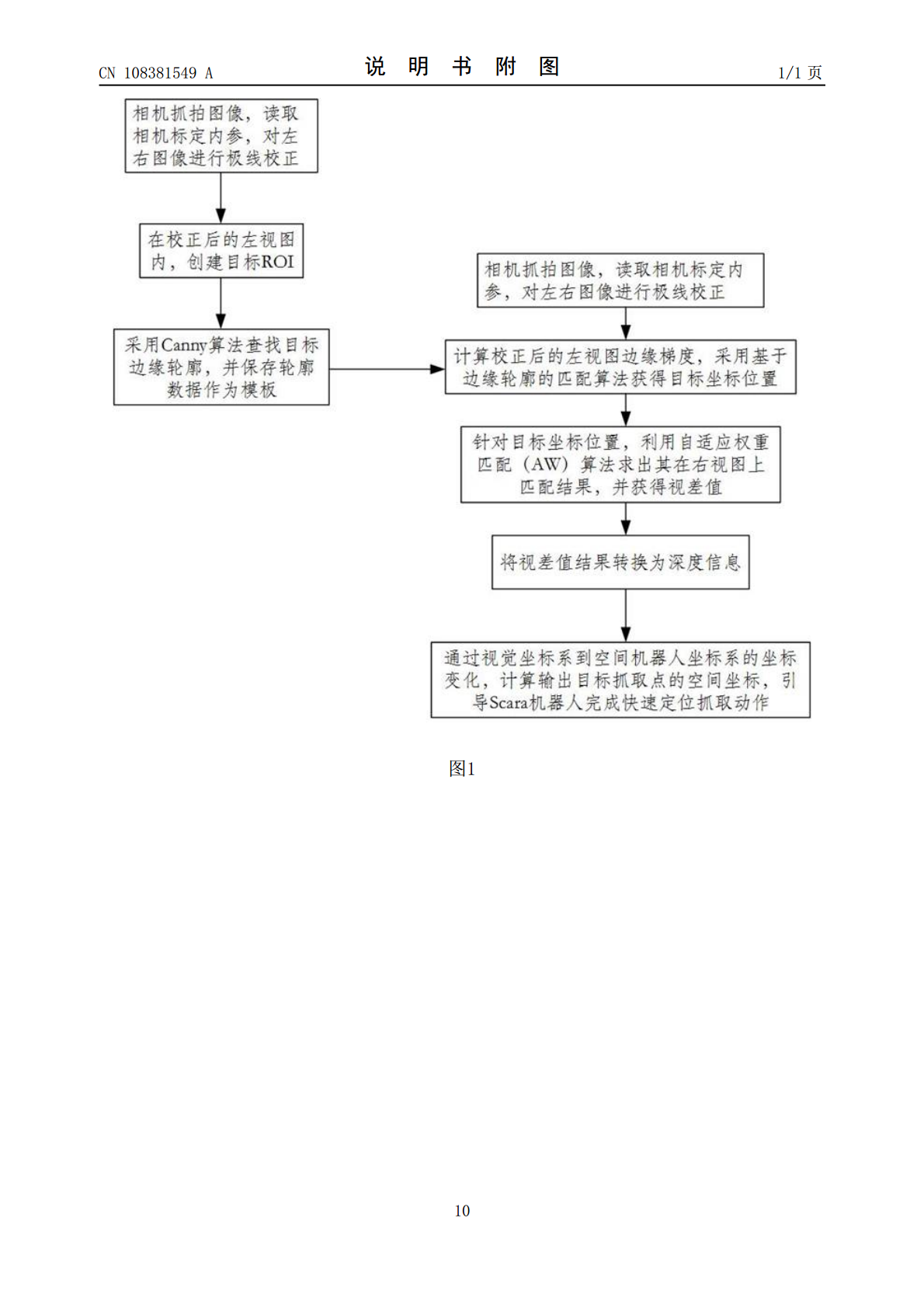
本发明实施例公开了一种双目视觉引导机器人快速抓取方法、装置及存储介质,包括对左右相机进行校正后,对左视图采用基于边缘轮廓的匹配算法获得目标点坐标位置;针对所述目标点坐标位置,通过自适应权重匹配算法求出其在右视图上匹配结果,并获得视差值;将所述视差值结果转换为深度信息;根据所述深度信息计算输出目标抓取点的空间坐标,引导机器人完成快速定位抓取动作。本发明实施例还公开了一种用于双目视觉引导机器人快速抓取的装置及存储介质。采用本发明,可减小光线的干扰,并可相对传统的双目视觉立体定位算法速度快3~6倍,且在水平方向
基于双目视觉的无序抓取方法、系统及存储介质.pdf
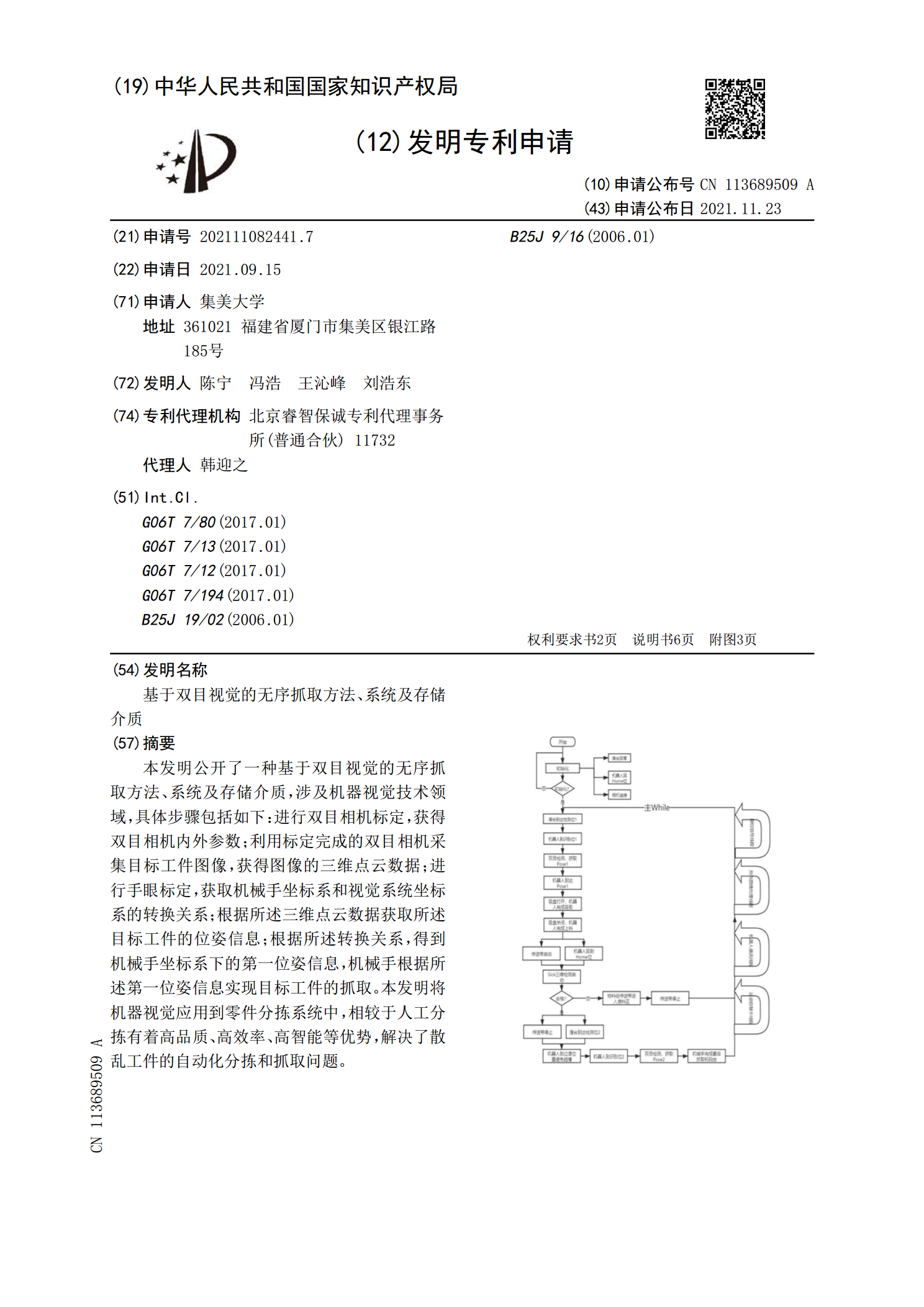
本发明公开了一种基于双目视觉的无序抓取方法、系统及存储介质,涉及机器视觉技术领域,具体步骤包括如下:进行双目相机标定,获得双目相机内外参数;利用标定完成的双目相机采集目标工件图像,获得图像的三维点云数据;进行手眼标定,获取机械手坐标系和视觉系统坐标系的转换关系;根据所述三维点云数据获取所述目标工件的位姿信息;根据所述转换关系,得到机械手坐标系下的第一位姿信息,机械手根据所述第一位姿信息实现目标工件的抓取。本发明将机器视觉应用到零件分拣系统中,相较于人工分拣有着高品质、高效率、高智能等优势,解决了散乱工件的

双目视觉引导机器人定位抓取技术的研究.docx
双目视觉引导机器人定位抓取技术的研究双目视觉引导机器人定位抓取技术的研究摘要:随着工业自动化程度的不断提高,机器人已经成为现代工厂生产线上的重要组成部分。其中,机器人的视觉引导技术是关键的研究领域之一。本文重点探讨双目视觉引导机器人定位抓取技术的研究。首先,介绍了双目视觉的原理、优势和应用场景;其次,分析了机器视觉技术在机器人中的应用;接着,详细阐述了双目视觉引导机器人定位抓取技术的研究内容和方法;最后,简要总结了本文的研究成果和进一步的研究方向。关键词:双目视觉;机器人;定位抓取技术;机器视觉一、引言机
物体抓取方法、装置、机器人及存储介质.pdf
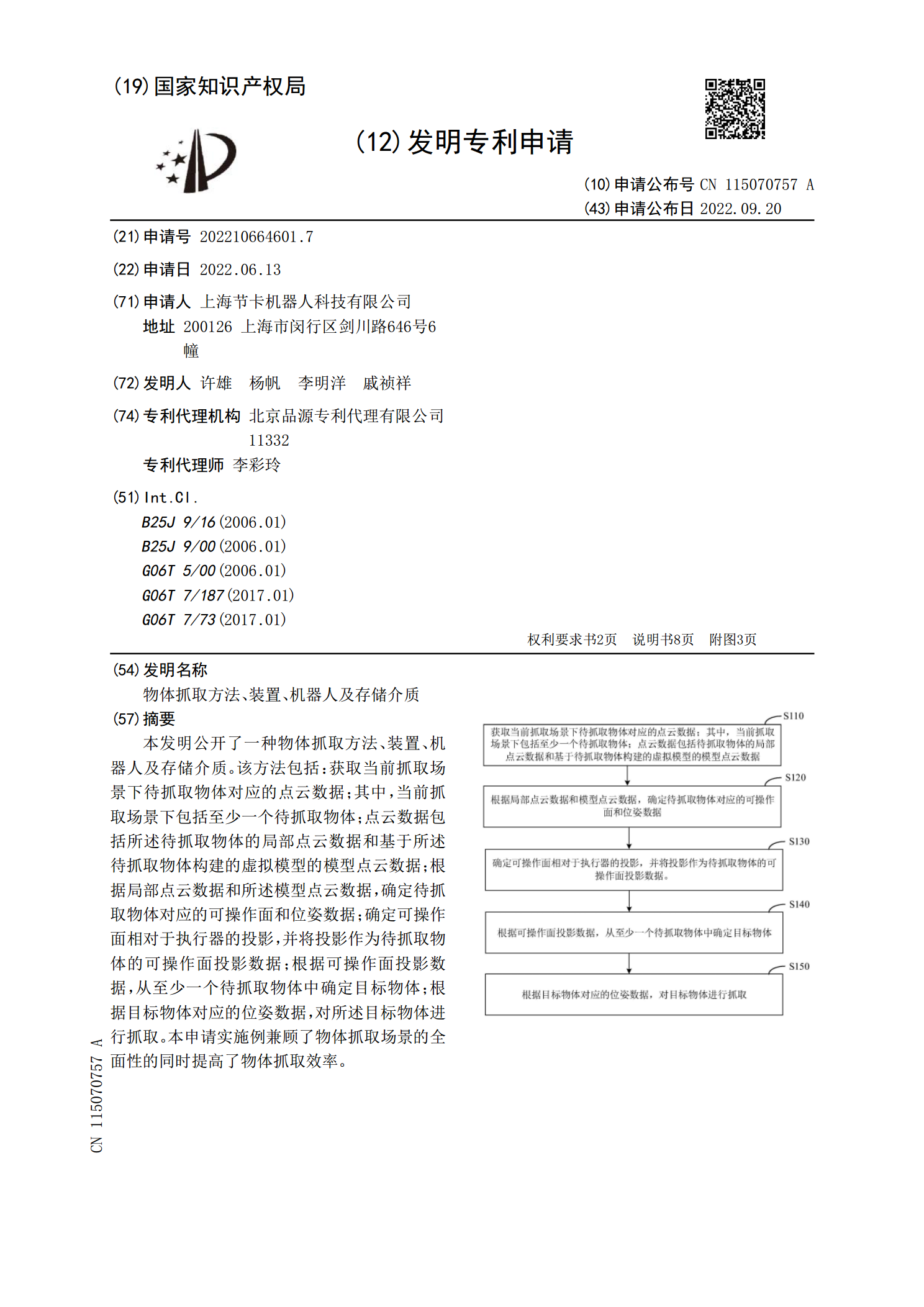
本发明公开了一种物体抓取方法、装置、机器人及存储介质。该方法包括:获取当前抓取场景下待抓取物体对应的点云数据;其中,当前抓取场景下包括至少一个待抓取物体;点云数据包括所述待抓取物体的局部点云数据和基于所述待抓取物体构建的虚拟模型的模型点云数据;根据局部点云数据和所述模型点云数据,确定待抓取物体对应的可操作面和位姿数据;确定可操作面相对于执行器的投影,并将投影作为待抓取物体的可操作面投影数据;根据可操作面投影数据,从至少一个待抓取物体中确定目标物体;根据目标物体对应的位姿数据,对所述目标物体进行抓取。本申请
一种基于双目视觉的快递包裹抓取装置和抓取方法.pdf
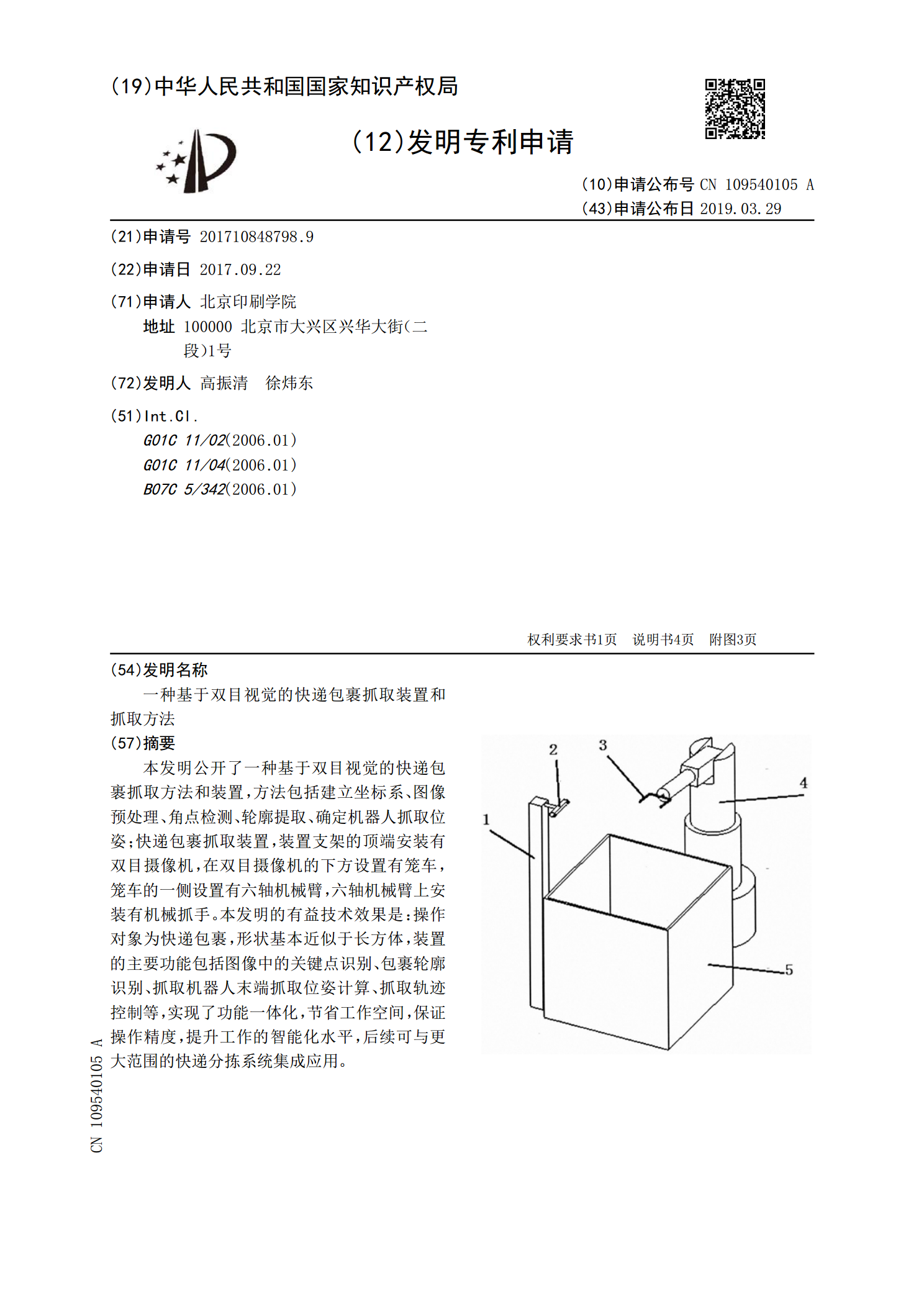
本发明公开了一种基于双目视觉的快递包裹抓取方法和装置,方法包括建立坐标系、图像预处理、角点检测、轮廓提取、确定机器人抓取位姿;快递包裹抓取装置,装置支架的顶端安装有双目摄像机,在双目摄像机的下方设置有笼车,笼车的一侧设置有六轴机械臂,六轴机械臂上安装有机械抓手。本发明的有益技术效果是:操作对象为快递包裹,形状基本近似于长方体,装置的主要功能包括图像中的关键点识别、包裹轮廓识别、抓取机器人末端抓取位姿计算、抓取轨迹控制等,实现了功能一体化,节省工作空间,保证操作精度,提升工作的智能化水平,后续可与更大范围的