
基于双目视觉的无序抓取方法、系统及存储介质.pdf

努力****南绿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉的无序抓取方法、系统及存储介质.pdf
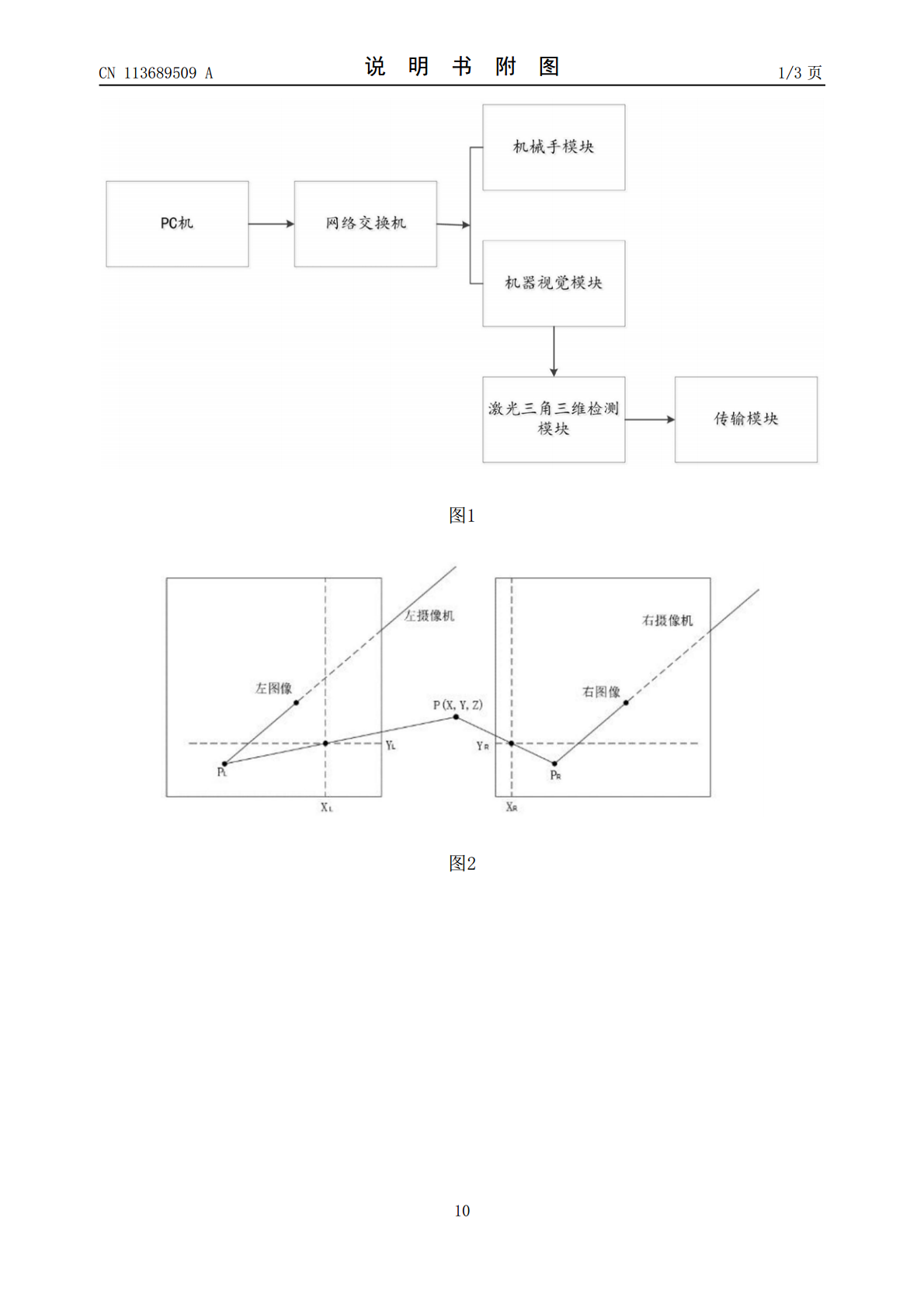
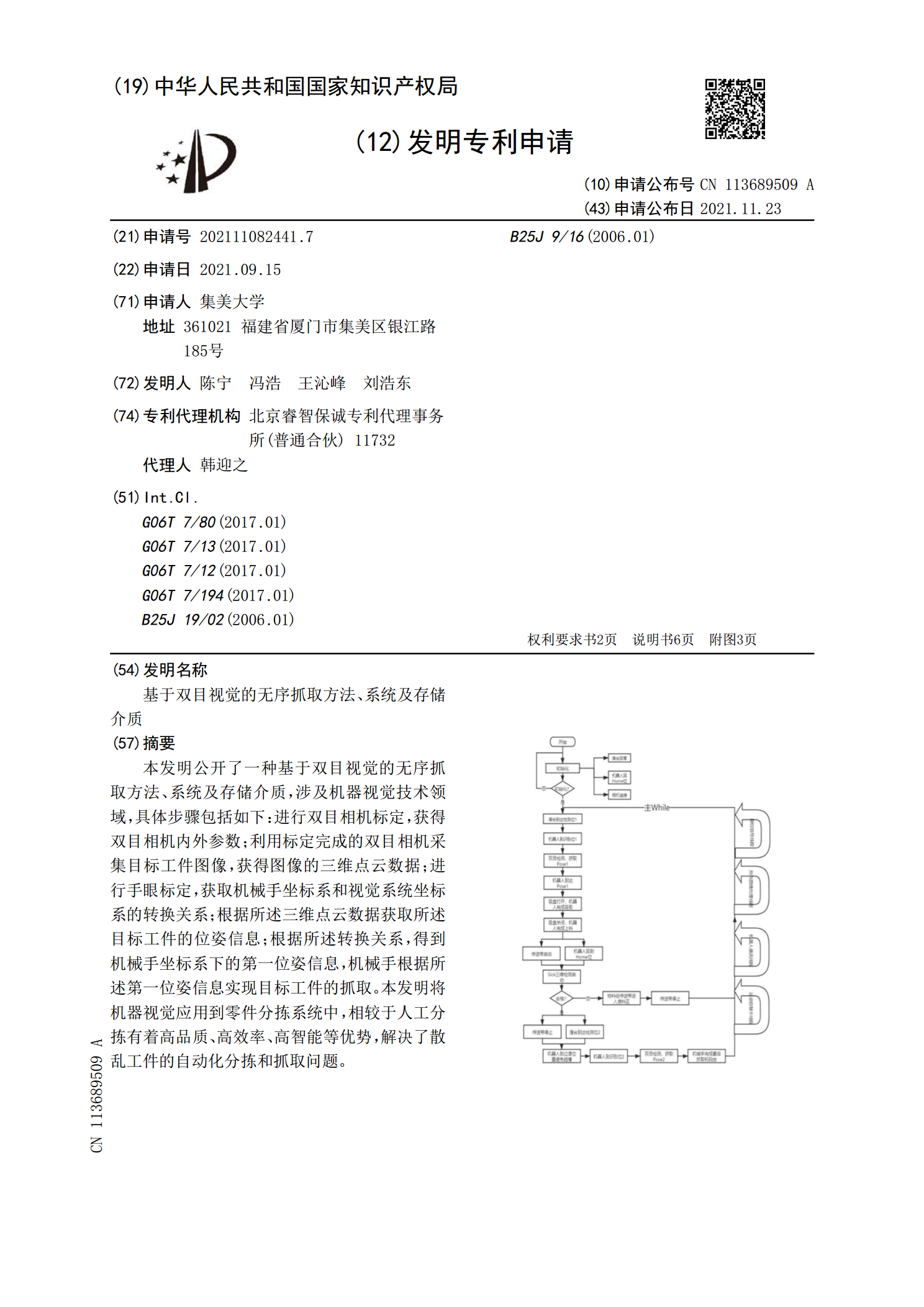
本发明公开了一种基于双目视觉的无序抓取方法、系统及存储介质,涉及机器视觉技术领域,具体步骤包括如下:进行双目相机标定,获得双目相机内外参数;利用标定完成的双目相机采集目标工件图像,获得图像的三维点云数据;进行手眼标定,获取机械手坐标系和视觉系统坐标系的转换关系;根据所述三维点云数据获取所述目标工件的位姿信息;根据所述转换关系,得到机械手坐标系下的第一位姿信息,机械手根据所述第一位姿信息实现目标工件的抓取。本发明将机器视觉应用到零件分拣系统中,相较于人工分拣有着高品质、高效率、高智能等优势,解决了散乱工件的

基于机器视觉的气门无序摆放抓取系统的研究.docx
基于机器视觉的气门无序摆放抓取系统的研究基于机器视觉的气门无序摆放抓取系统的研究摘要:气门是一种重要的机械零件,广泛应用于各种工业设备和发动机中。然而,在生产过程中气门被随机摆放,存在无序的问题,这给自动生产线中的抓取机器人带来了困扰。本文提出了一种基于机器视觉的气门无序摆放抓取系统,该系统利用机器视觉技术对气门进行识别和定位,实现了自动化的气门抓取。1.引言随着工业自动化程度的提高,机器人在生产线上的应用越来越广泛。然而,由于气门无序摆放的问题,机器人在抓取气门时往往面临着困难。传统的方法是通过规则化形
基于双目视觉的体积测量方法、装置及存储介质.pdf
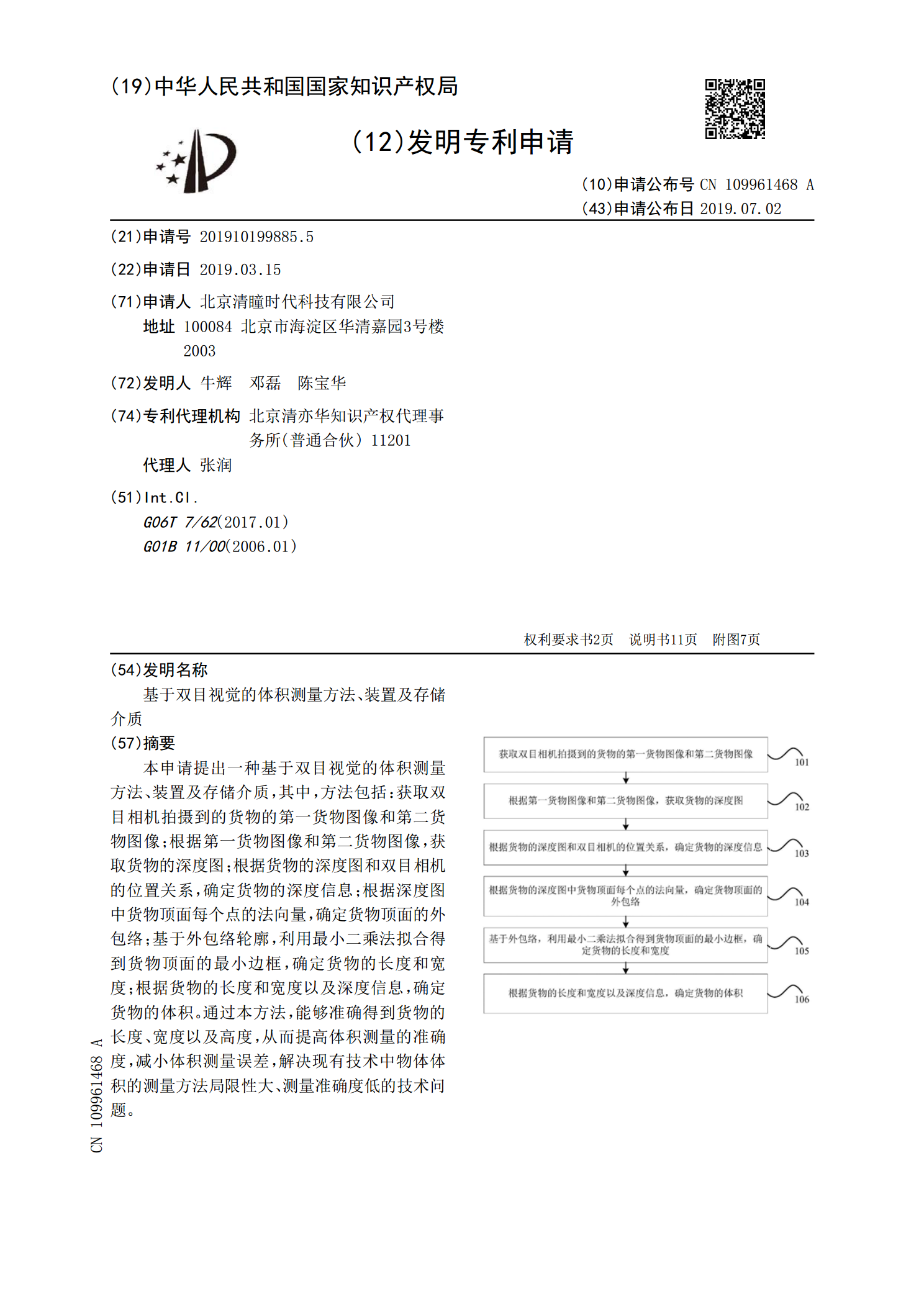
本申请提出一种基于双目视觉的体积测量方法、装置及存储介质,其中,方法包括:获取双目相机拍摄到的货物的第一货物图像和第二货物图像;根据第一货物图像和第二货物图像,获取货物的深度图;根据货物的深度图和双目相机的位置关系,确定货物的深度信息;根据深度图中货物顶面每个点的法向量,确定货物顶面的外包络;基于外包络轮廓,利用最小二乘法拟合得到货物顶面的最小边框,确定货物的长度和宽度;根据货物的长度和宽度以及深度信息,确定货物的体积。通过本方法,能够准确得到货物的长度、宽度以及高度,从而提高体积测量的准确度,减小体积测

基于双目视觉的工件抓取系统研究.docx
基于双目视觉的工件抓取系统研究基于双目视觉的工件抓取系统研究摘要:随着工业自动化技术的不断发展,工件抓取系统在生产现场中的应用越来越广泛。本文旨在研究基于双目视觉的工件抓取系统,通过对视觉算法、抓取策略和系统实现等方面的研究,提出了一种高效的工件抓取系统,能够实现对不同工件的准确、稳定的抓取。1.引言工件抓取系统是一种基于自动化技术的装配生产线中的重要设备,其功能是将工件从指定位置抓取并放置到正确的位置。传统的工件抓取系统通常依赖于机械手臂等硬件设备,但这种方法存在着很多局限性。而基于双目视觉的工件抓取系

一种双目视觉引导机器人快速抓取方法、装置及存储介质.pdf
本发明实施例公开了一种双目视觉引导机器人快速抓取方法、装置及存储介质,包括对左右相机进行校正后,对左视图采用基于边缘轮廓的匹配算法获得目标点坐标位置;针对所述目标点坐标位置,通过自适应权重匹配算法求出其在右视图上匹配结果,并获得视差值;将所述视差值结果转换为深度信息;根据所述深度信息计算输出目标抓取点的空间坐标,引导机器人完成快速定位抓取动作。本发明实施例还公开了一种用于双目视觉引导机器人快速抓取的装置及存储介质。采用本发明,可减小光线的干扰,并可相对传统的双目视觉立体定位算法速度快3~6倍,且在水平方向