
底火拧紧装置以及拧紧方法.pdf

是你****松呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
底火拧紧装置以及拧紧方法.pdf
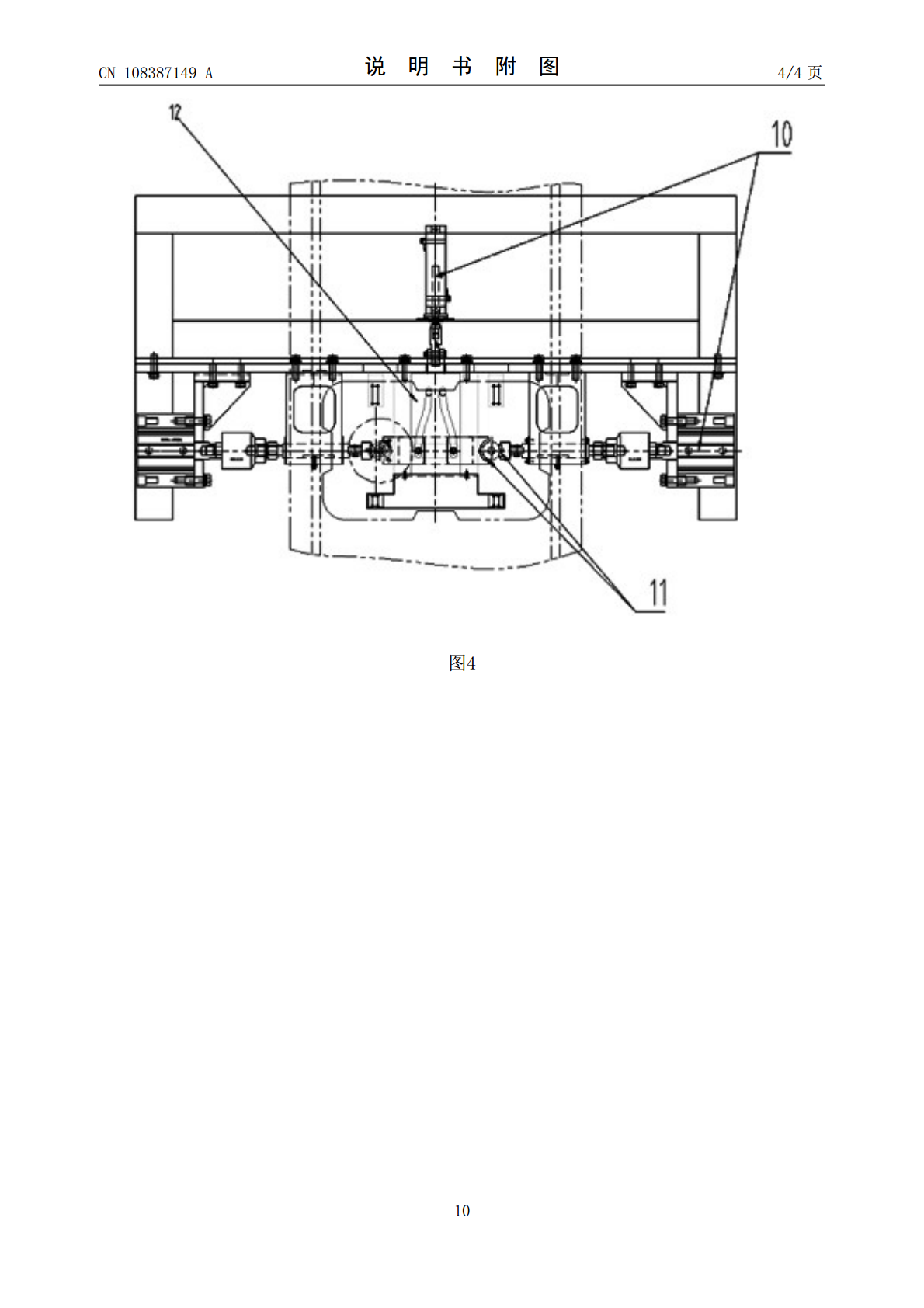
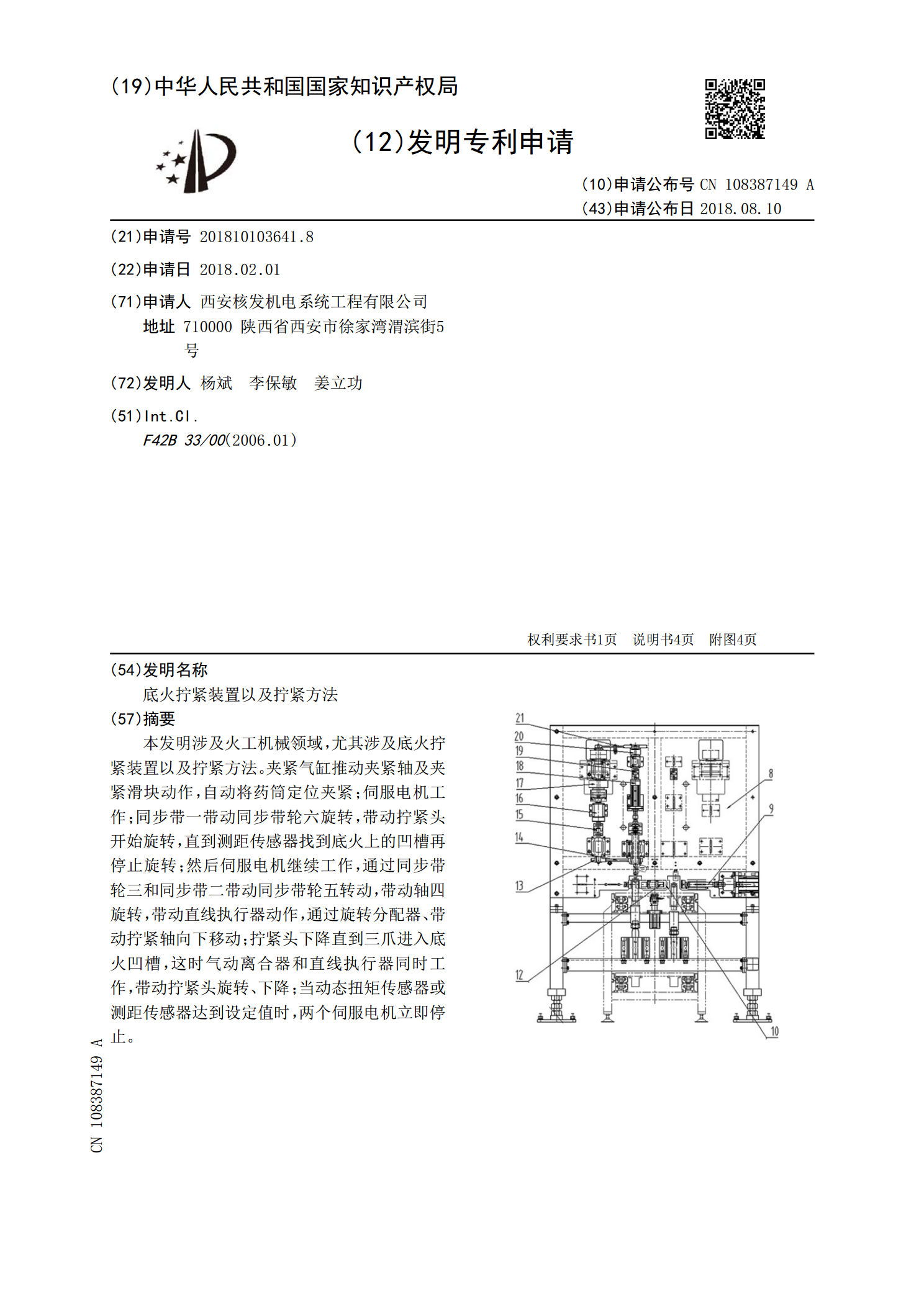
本发明涉及火工机械领域,尤其涉及底火拧紧装置以及拧紧方法。夹紧气缸推动夹紧轴及夹紧滑块动作,自动将药筒定位夹紧;伺服电机工作;同步带一带动同步带轮六旋转,带动拧紧头开始旋转,直到测距传感器找到底火上的凹槽再停止旋转;然后伺服电机继续工作,通过同步带轮三和同步带二带动同步带轮五转动,带动轴四旋转,带动直线执行器动作,通过旋转分配器、带动拧紧轴向下移动;拧紧头下降直到三爪进入底火凹槽,这时气动离合器和直线执行器同时工作,带动拧紧头旋转、下降;当动态扭矩传感器或测距传感器达到设定值时,两个伺服电机立即停止。

车轮拧紧方法、拧紧控制装置和拧紧系统.pdf
本发明提供了一种车轮拧紧方法、拧紧控制装置和拧紧系统,其中该方法包括如下步骤:所有拧紧轴同时工作,向车轮的各螺栓分别施加拧紧扭矩至达到预紧扭矩设定值;在设定停顿时间内,所有拧紧轴停止增加拧紧扭矩;所有拧紧轴同时工作,将施加在各螺栓上的拧紧扭矩由预紧扭矩设定值增加到复紧扭矩设定值;将所有拧紧轴反转设定反转角度;所有拧紧轴同时工作,将施加在各螺栓上的拧紧扭矩增加到最终扭矩设定值;将所有拧紧轴反转设定卸荷角度,卸除所有拧紧轴施加的拧紧扭矩。本发明提供的车轮拧紧方法解决了现有拧紧机紧固带有装饰罩的车轮时装饰罩易产

小口径炮弹底火自动拧紧专机研究.docx
小口径炮弹底火自动拧紧专机研究标题:小口径炮弹底火自动拧紧专机研究摘要:本论文旨在研究小口径炮弹底火自动拧紧专机的设计与优化。首先,文章详细探讨了小口径炮弹底火自动拧紧原理、机构设计和工作过程。随后,对该专机的性能进行了评估,并提出了优化方案。最后,给出未来研究的展望。第一部分:介绍与背景1.引言:小口径炮弹和底火自动拧紧的重要性和研究现状。2.小口径炮弹与底火自动拧紧的定义以及相关术语的解释。第二部分:小口径炮弹底火自动拧紧原理与机构设计1.小口径炮弹底火自动拧紧的基本原理和目的。2.自动拧紧专机的主要

单驱动双运动自动拧紧螺栓装置及其拧紧螺栓的方法.pdf
本发明公开的单驱动双运动自动拧紧螺栓装置,包括电机、减速器、扭矩传感器、主动齿形皮带轮A、传动轴、电磁离合器、主动齿形皮带轮B、电磁制动器、框架、齿形带A、滚珠螺杆花键轴、旋转型滚珠螺母组件、被动齿形皮带轮A、齿形带B、被动齿形皮带轮B、旋转型滚珠花键套组件、非接触位移传感器、反射板、法兰式滚珠花键套、限位环、连接组件、压缩弹簧和扳手组件。本发明的单驱动双运动自动拧紧螺栓装置,单驱动、全自动、效率高、结构紧凑,适合自动化生产线上使用;具有耦合能力,使应用范围广,可以用于不同螺距的螺栓拧紧。本发明还提供了单
螺母拧紧装置.pdf
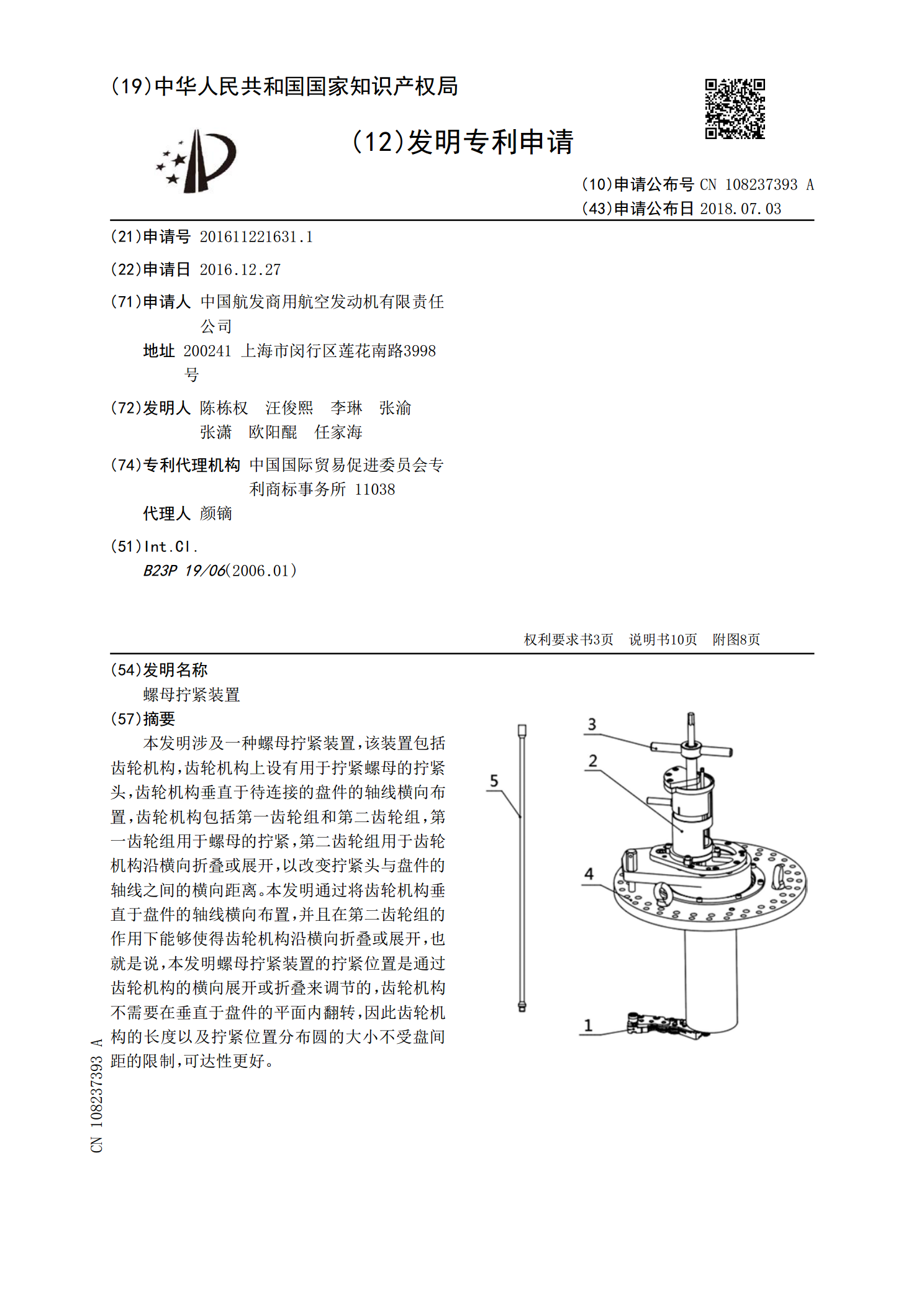
本发明涉及一种螺母拧紧装置,该装置包括齿轮机构,齿轮机构上设有用于拧紧螺母的拧紧头,齿轮机构垂直于待连接的盘件的轴线横向布置,齿轮机构包括第一齿轮组和第二齿轮组,第一齿轮组用于螺母的拧紧,第二齿轮组用于齿轮机构沿横向折叠或展开,以改变拧紧头与盘件的轴线之间的横向距离。本发明通过将齿轮机构垂直于盘件的轴线横向布置,并且在第二齿轮组的作用下能够使得齿轮机构沿横向折叠或展开,也就是说,本发明螺母拧紧装置的拧紧位置是通过齿轮机构的横向展开或折叠来调节的,齿轮机构不需要在垂直于盘件的平面内翻转,因此齿轮机构的长度以