
单驱动双运动自动拧紧螺栓装置及其拧紧螺栓的方法.pdf

玉环****找我

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单驱动双运动自动拧紧螺栓装置及其拧紧螺栓的方法.pdf
本发明公开的单驱动双运动自动拧紧螺栓装置,包括电机、减速器、扭矩传感器、主动齿形皮带轮A、传动轴、电磁离合器、主动齿形皮带轮B、电磁制动器、框架、齿形带A、滚珠螺杆花键轴、旋转型滚珠螺母组件、被动齿形皮带轮A、齿形带B、被动齿形皮带轮B、旋转型滚珠花键套组件、非接触位移传感器、反射板、法兰式滚珠花键套、限位环、连接组件、压缩弹簧和扳手组件。本发明的单驱动双运动自动拧紧螺栓装置,单驱动、全自动、效率高、结构紧凑,适合自动化生产线上使用;具有耦合能力,使应用范围广,可以用于不同螺距的螺栓拧紧。本发明还提供了单

螺栓自动拧紧机拧紧控制方法的探讨.docx
螺栓自动拧紧机拧紧控制方法的探讨螺栓自动拧紧机拧紧控制方法的探讨摘要:螺栓拧紧是工业生产中常见的操作,传统的手工拧紧工作量大、效率低。为了提高生产效率和产品质量,越来越多的企业采用螺栓自动拧紧机来完成拧紧工作。本文对螺栓自动拧紧机的拧紧控制方法进行了探讨,主要从传统的扭力控制方法、角度控制方法以及新兴的力矩角度控制方法等方面进行了介绍和比较。关键词:螺栓自动拧紧机;拧紧控制;扭力控制;角度控制;力矩角度控制一、引言螺栓自动拧紧机是一种能够自动完成螺栓拧紧任务的装置,广泛应用于汽车制造、机械制造、航空航天等
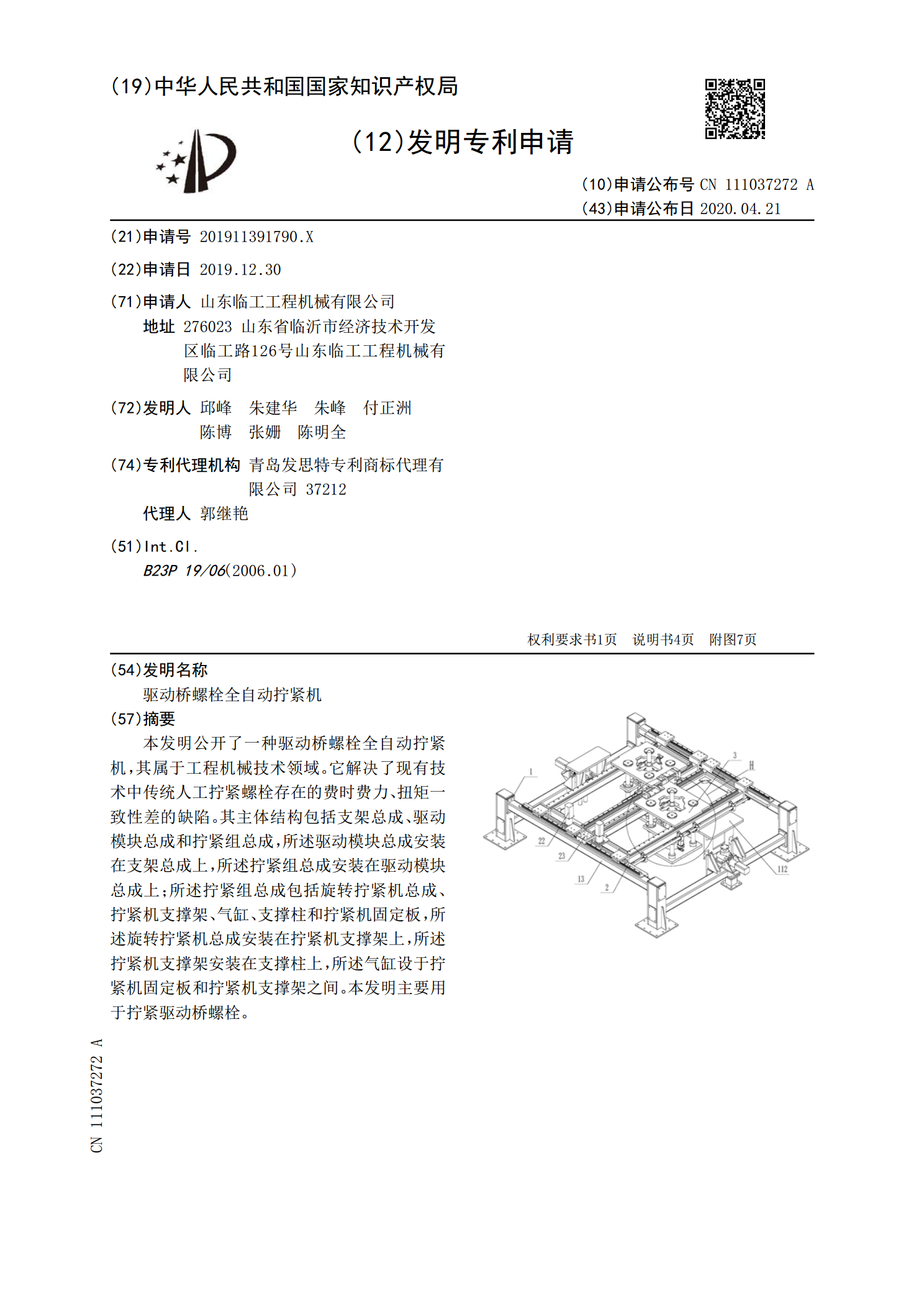
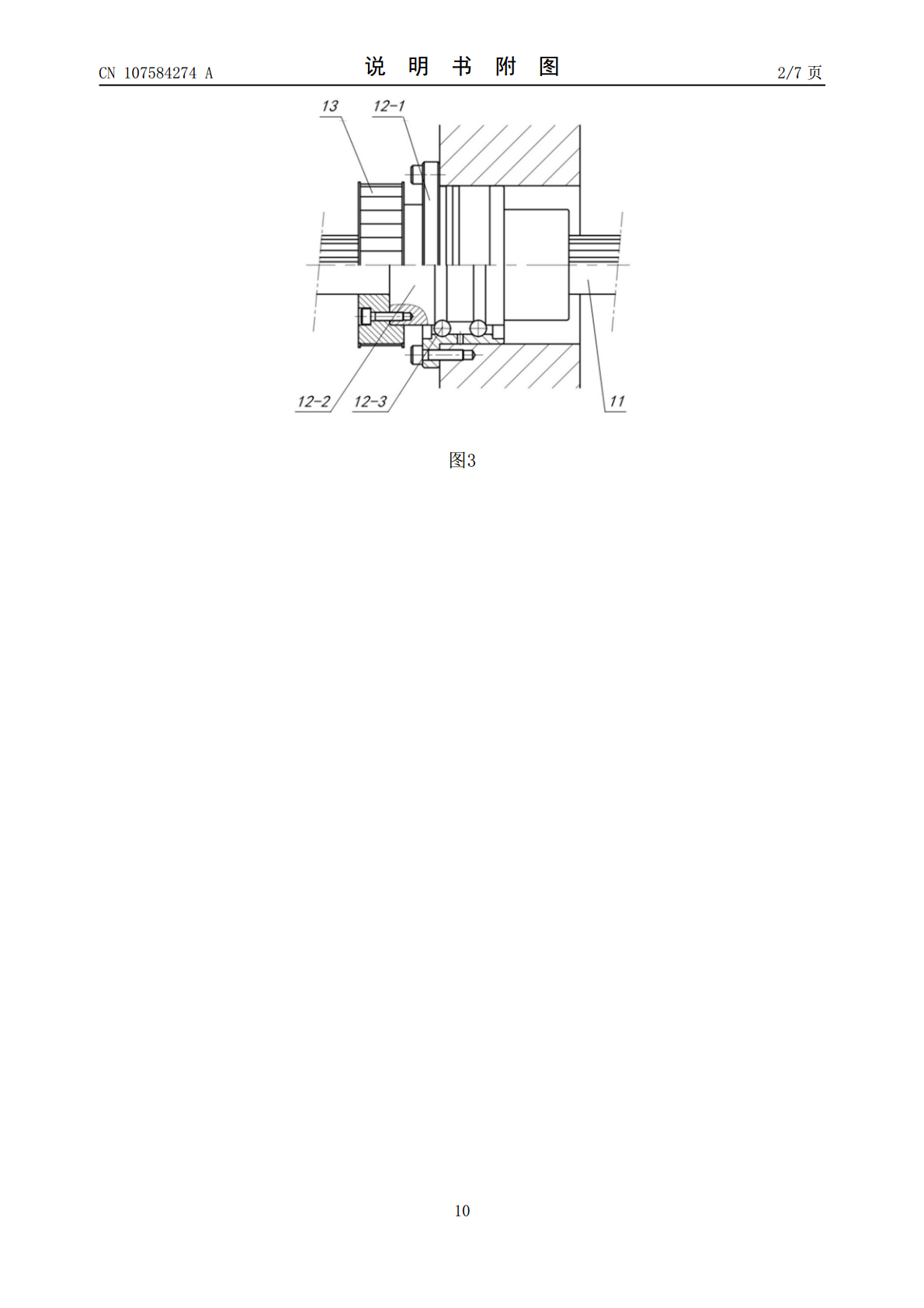
驱动桥螺栓全自动拧紧机.pdf
本发明公开了一种驱动桥螺栓全自动拧紧机,其属于工程机械技术领域。它解决了现有技术中传统人工拧紧螺栓存在的费时费力、扭矩一致性差的缺陷。其主体结构包括支架总成、驱动模块总成和拧紧组总成,所述驱动模块总成安装在支架总成上,所述拧紧组总成安装在驱动模块总成上;所述拧紧组总成包括旋转拧紧机总成、拧紧机支撑架、气缸、支撑柱和拧紧机固定板,所述旋转拧紧机总成安装在拧紧机支撑架上,所述拧紧机支撑架安装在支撑柱上,所述气缸设于拧紧机固定板和拧紧机支撑架之间。本发明主要用于拧紧驱动桥螺栓。
螺栓拧紧定义及螺栓拧紧工作原理.pdf
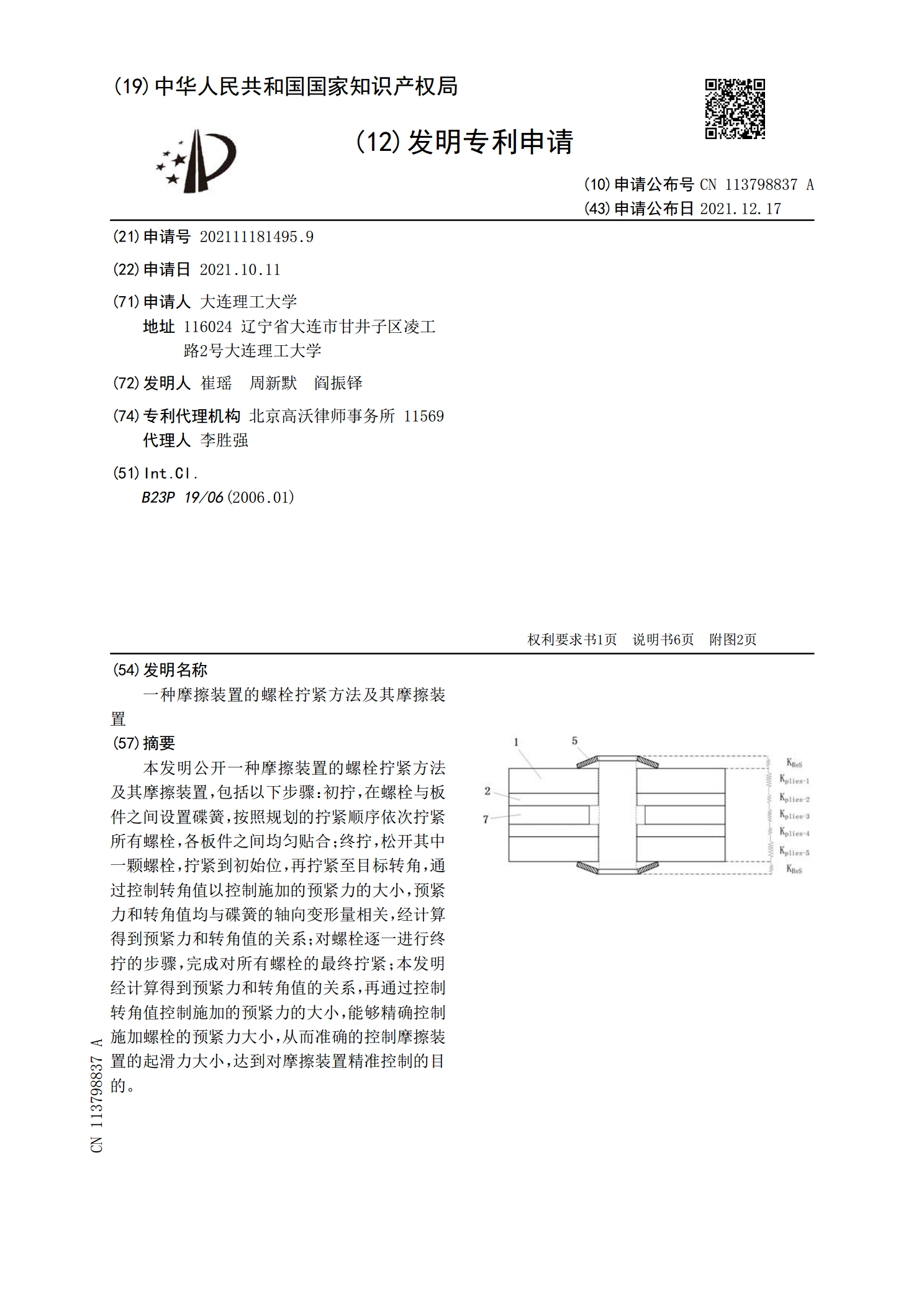
一种摩擦装置的螺栓拧紧方法及其摩擦装置.pdf
本发明公开一种摩擦装置的螺栓拧紧方法及其摩擦装置,包括以下步骤:初拧,在螺栓与板件之间设置碟簧,按照规划的拧紧顺序依次拧紧所有螺栓,各板件之间均匀贴合;终拧,松开其中一颗螺栓,拧紧到初始位,再拧紧至目标转角,通过控制转角值以控制施加的预紧力的大小,预紧力和转角值均与碟簧的轴向变形量相关,经计算得到预紧力和转角值的关系;对螺栓逐一进行终拧的步骤,完成对所有螺栓的最终拧紧;本发明经计算得到预紧力和转角值的关系,再通过控制转角值控制施加的预紧力的大小,能够精确控制施加螺栓的预紧力大小,从而准确的控制摩擦装置的起