
机器人焊接装置.pdf

书生****萌哒

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人焊接装置.pdf
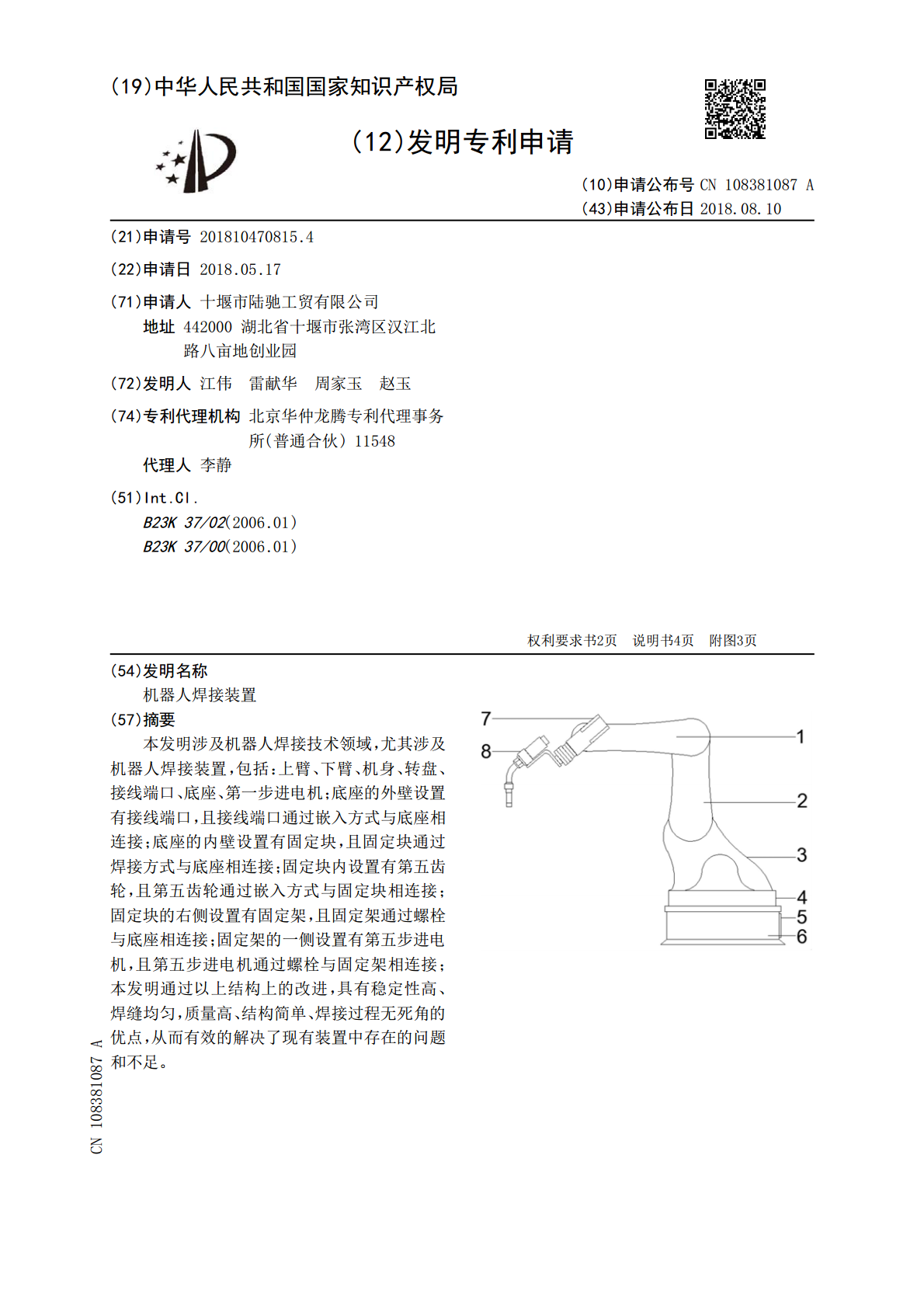
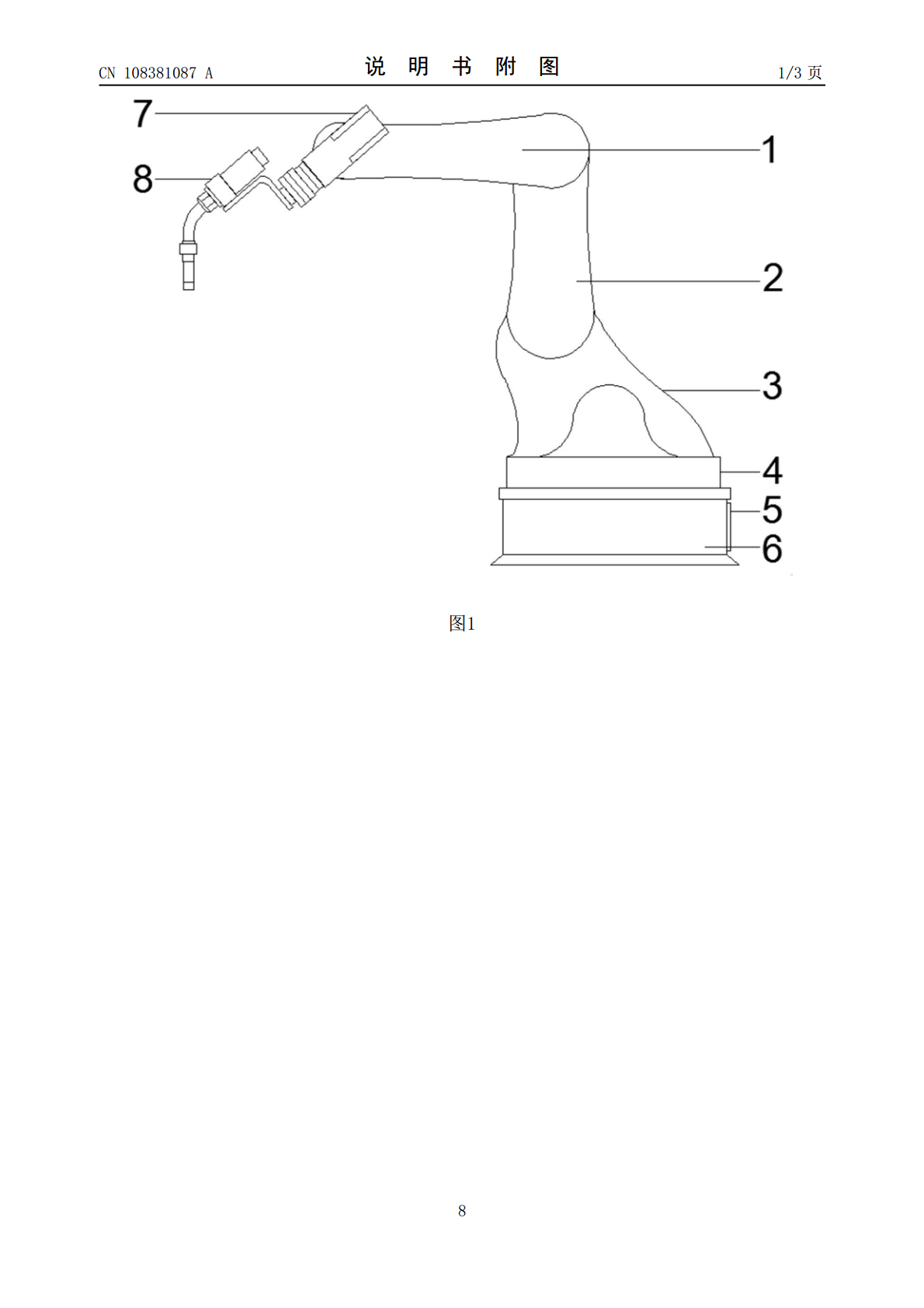
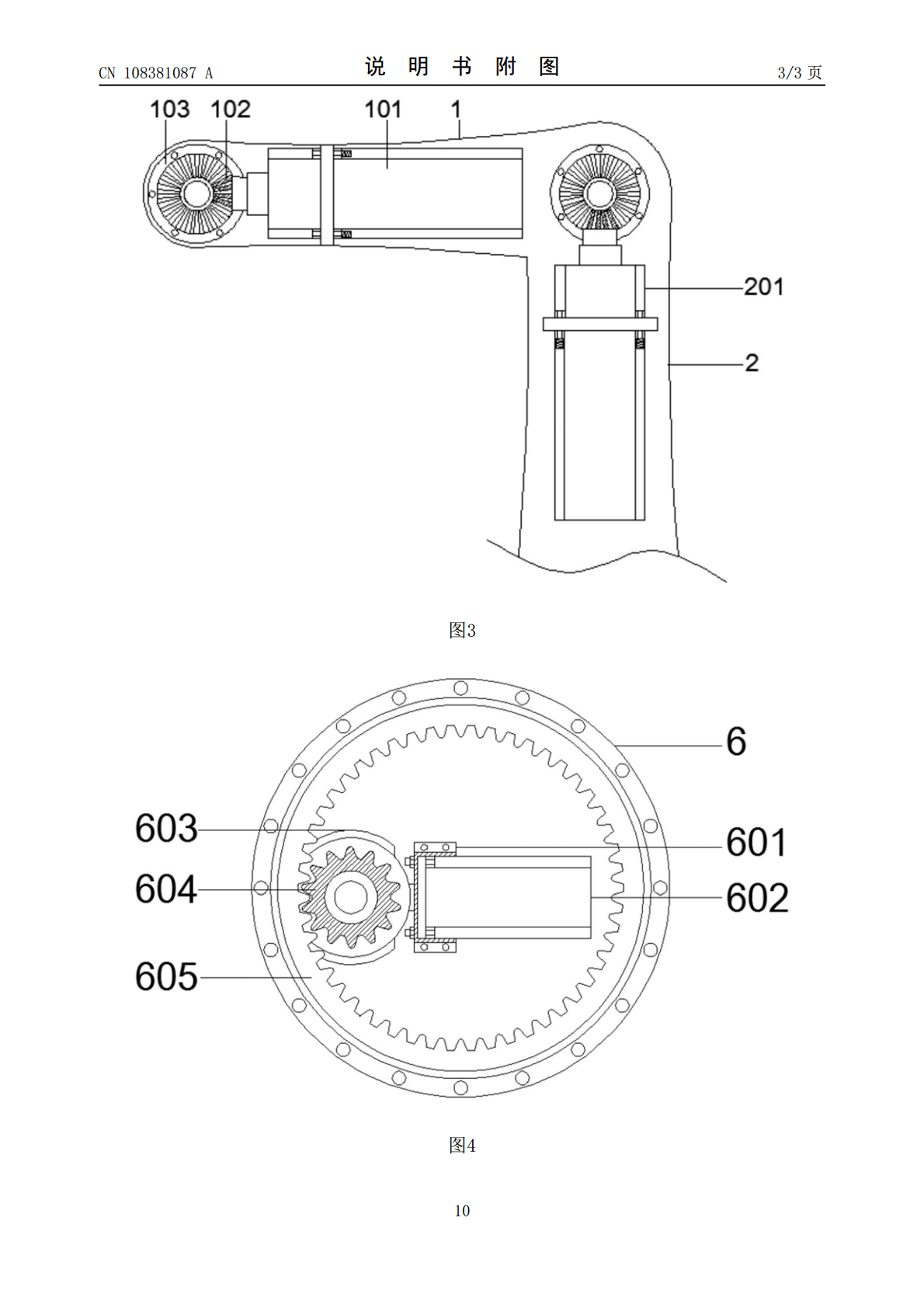
本发明涉及机器人焊接技术领域,尤其涉及机器人焊接装置,包括:上臂、下臂、机身、转盘、接线端口、底座、第一步进电机;底座的外壁设置有接线端口,且接线端口通过嵌入方式与底座相连接;底座的内壁设置有固定块,且固定块通过焊接方式与底座相连接;固定块内设置有第五齿轮,且第五齿轮通过嵌入方式与固定块相连接;固定块的右侧设置有固定架,且固定架通过螺栓与底座相连接;固定架的一侧设置有第五步进电机,且第五步进电机通过螺栓与固定架相连接;本发明通过以上结构上的改进,具有稳定性高、焊缝均匀,质量高、结构简单、焊接过程无死角的优
一种机器人焊接装置.pdf
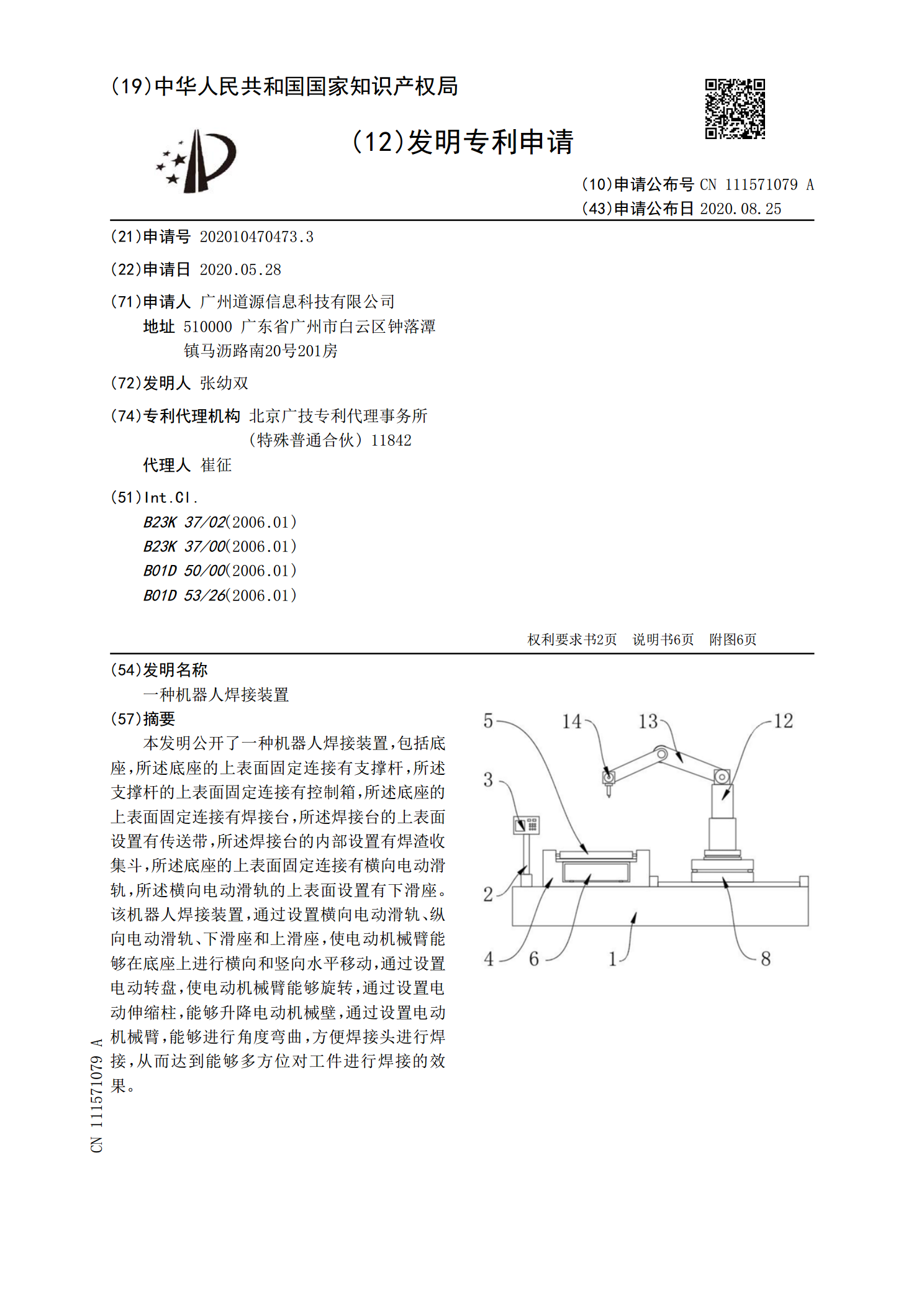
本发明公开了一种机器人焊接装置,包括底座,所述底座的上表面固定连接有支撑杆,所述支撑杆的上表面固定连接有控制箱,所述底座的上表面固定连接有焊接台,所述焊接台的上表面设置有传送带,所述焊接台的内部设置有焊渣收集斗,所述底座的上表面固定连接有横向电动滑轨,所述横向电动滑轨的上表面设置有下滑座。该机器人焊接装置,通过设置横向电动滑轨、纵向电动滑轨、下滑座和上滑座,使电动机械臂能够在底座上进行横向和竖向水平移动,通过设置电动转盘,使电动机械臂能够旋转,通过设置电动伸缩柱,能够升降电动机械壁,通过设置电动机械臂,能
一种便于焊接路径规划的机器人焊接装置.pdf
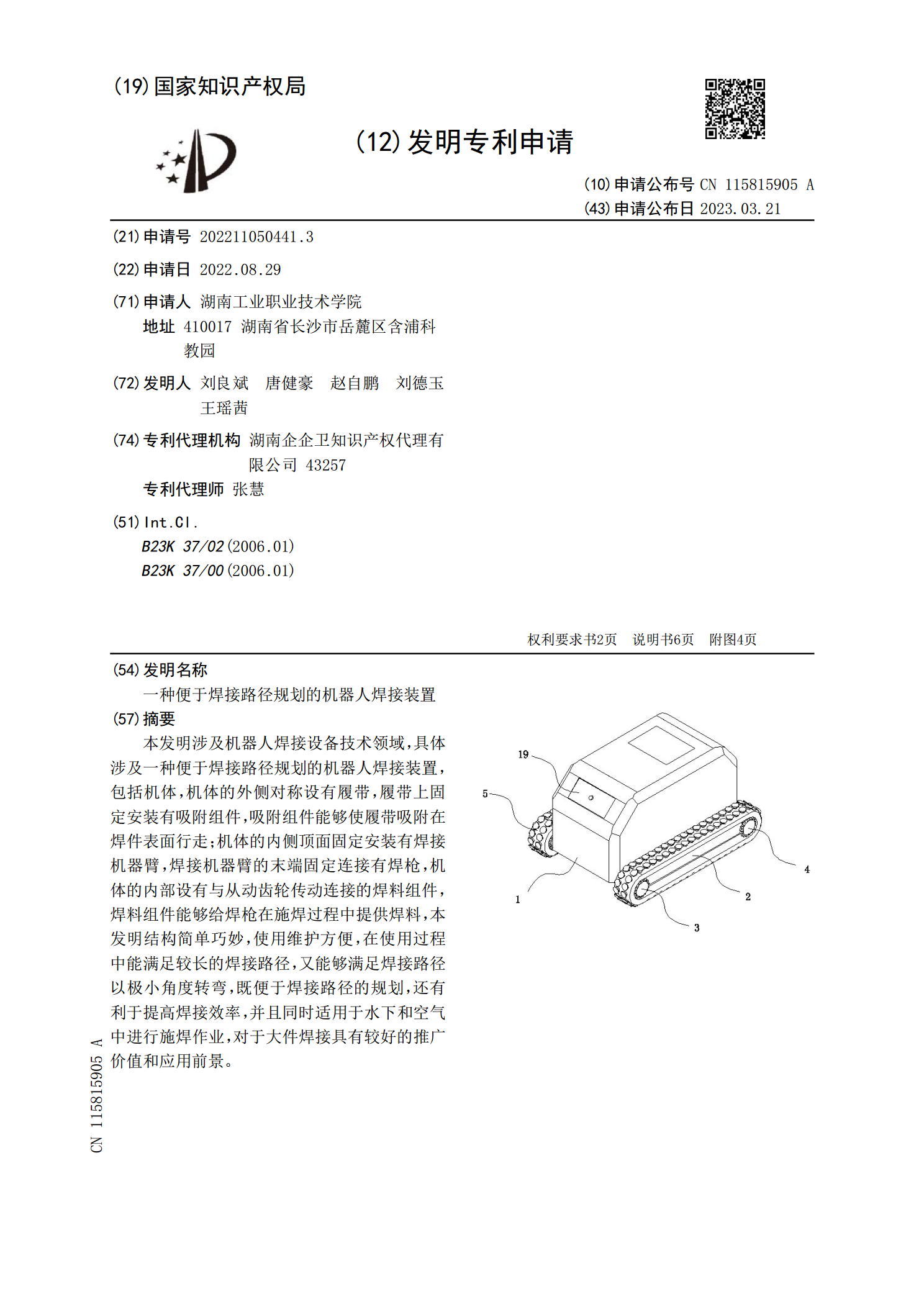
本发明涉及机器人焊接设备技术领域,具体涉及一种便于焊接路径规划的机器人焊接装置,包括机体,机体的外侧对称设有履带,履带上固定安装有吸附组件,吸附组件能够使履带吸附在焊件表面行走;机体的内侧顶面固定安装有焊接机器臂,焊接机器臂的末端固定连接有焊枪,机体的内部设有与从动齿轮传动连接的焊料组件,焊料组件能够给焊枪在施焊过程中提供焊料,本发明结构简单巧妙,使用维护方便,在使用过程中能满足较长的焊接路径,又能够满足焊接路径以极小角度转弯,既便于焊接路径的规划,还有利于提高焊接效率,并且同时适用于水下和空气中进行施焊
机器人焊接圆环轨迹方法及装置.pdf
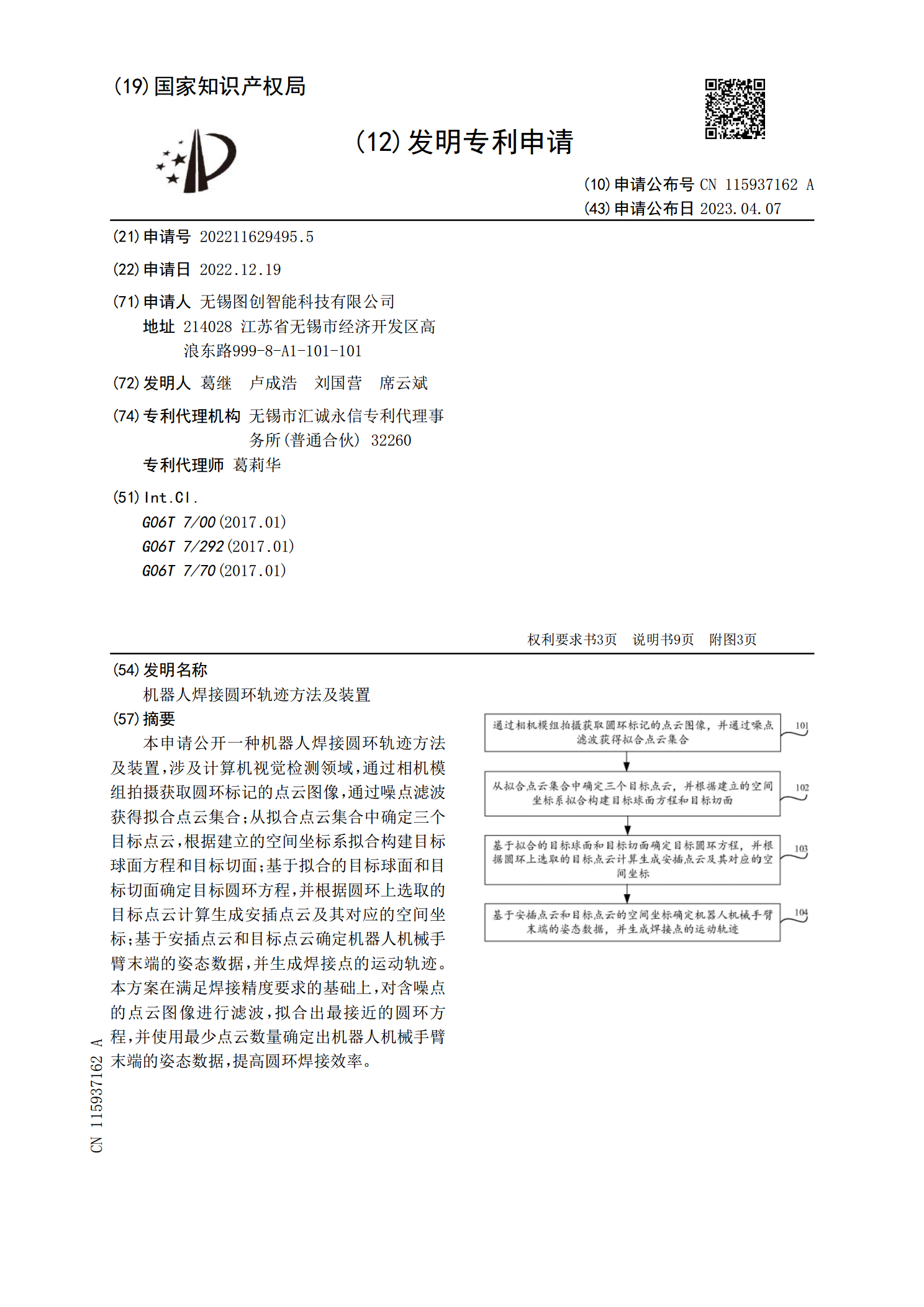
本申请公开一种机器人焊接圆环轨迹方法及装置,涉及计算机视觉检测领域,通过相机模组拍摄获取圆环标记的点云图像,通过噪点滤波获得拟合点云集合;从拟合点云集合中确定三个目标点云,根据建立的空间坐标系拟合构建目标球面方程和目标切面;基于拟合的目标球面和目标切面确定目标圆环方程,并根据圆环上选取的目标点云计算生成安插点云及其对应的空间坐标;基于安插点云和目标点云确定机器人机械手臂末端的姿态数据,并生成焊接点的运动轨迹。本方案在满足焊接精度要求的基础上,对含噪点的点云图像进行滤波,拟合出最接近的圆环方程,并使用最少点
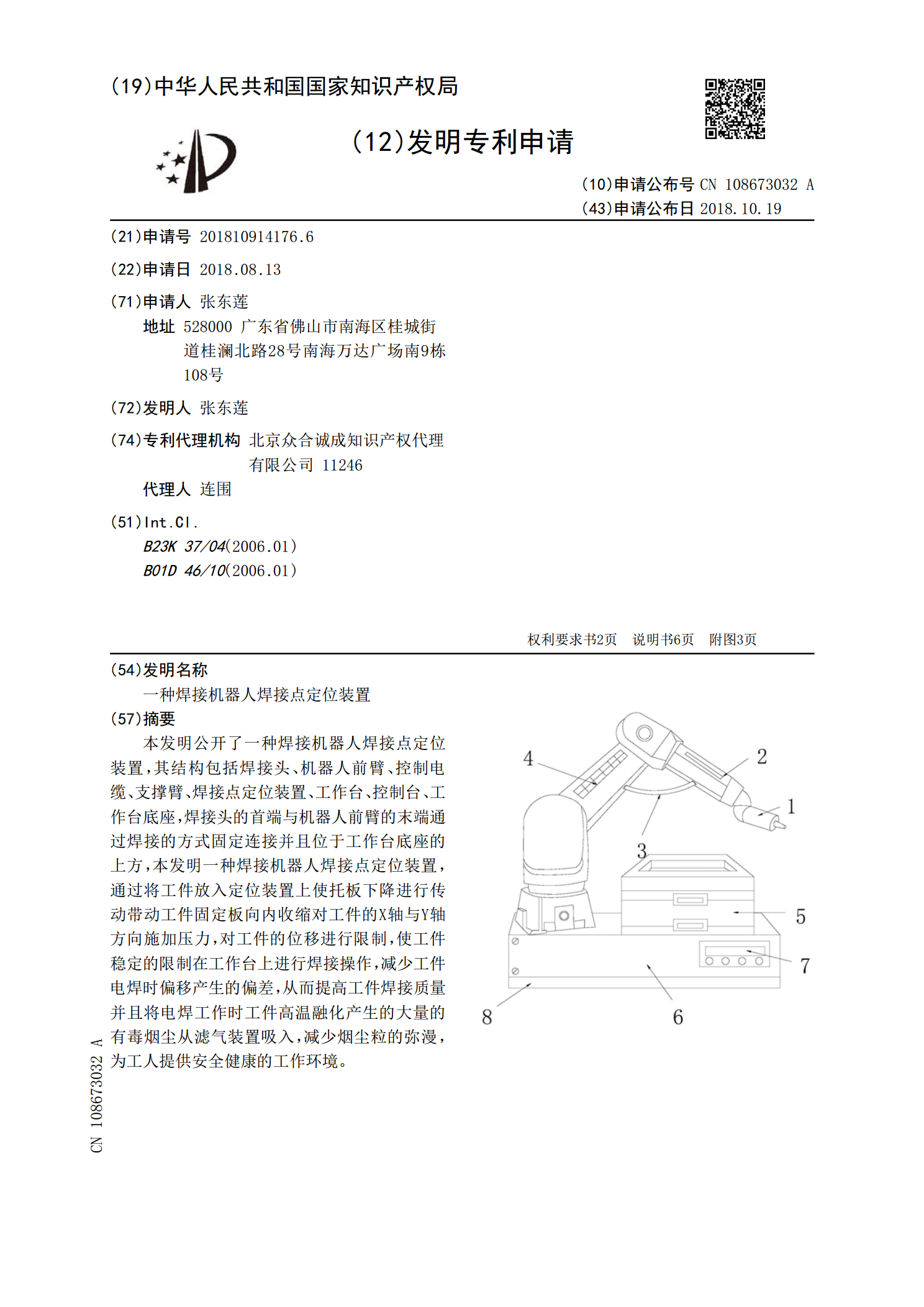
一种焊接机器人焊接点定位装置.pdf
本发明公开了一种焊接机器人焊接点定位装置,其结构包括焊接头、机器人前臂、控制电缆、支撑臂、焊接点定位装置、工作台、控制台、工作台底座,焊接头的首端与机器人前臂的末端通过焊接的方式固定连接并且位于工作台底座的上方,本发明一种焊接机器人焊接点定位装置,通过将工件放入定位装置上使托板下降进行传动带动工件固定板向内收缩对工件的X轴与Y轴方向施加压力,对工件的位移进行限制,使工件稳定的限制在工作台上进行焊接操作,减少工件电焊时偏移产生的偏差,从而提高工件焊接质量并且将电焊工作时工件高温融化产生的大量的有毒烟尘从滤气