
机器人焊接圆环轨迹方法及装置.pdf

慧红****ad

1/10
2/10
3/10
4/10
5/10
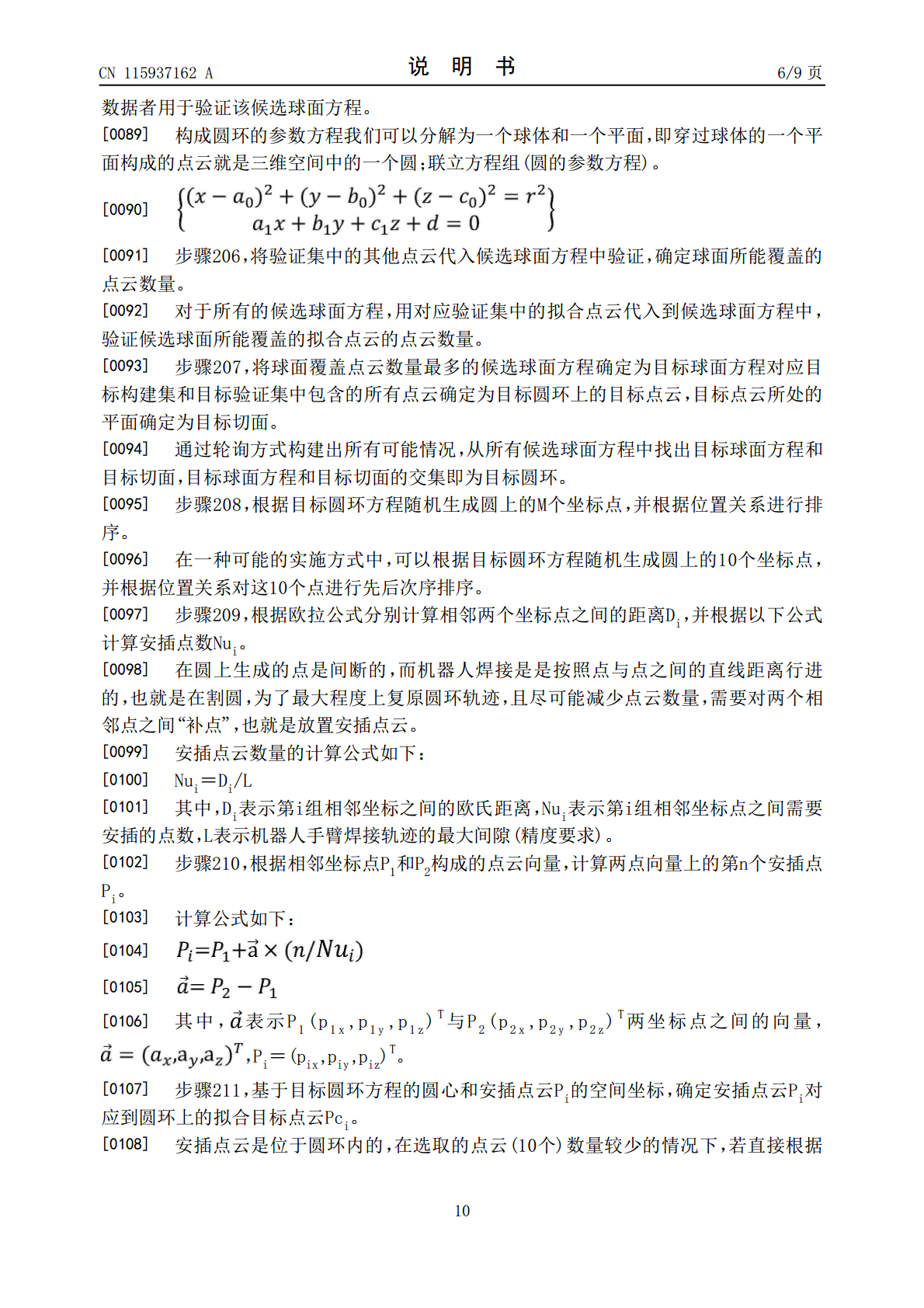
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人焊接圆环轨迹方法及装置.pdf
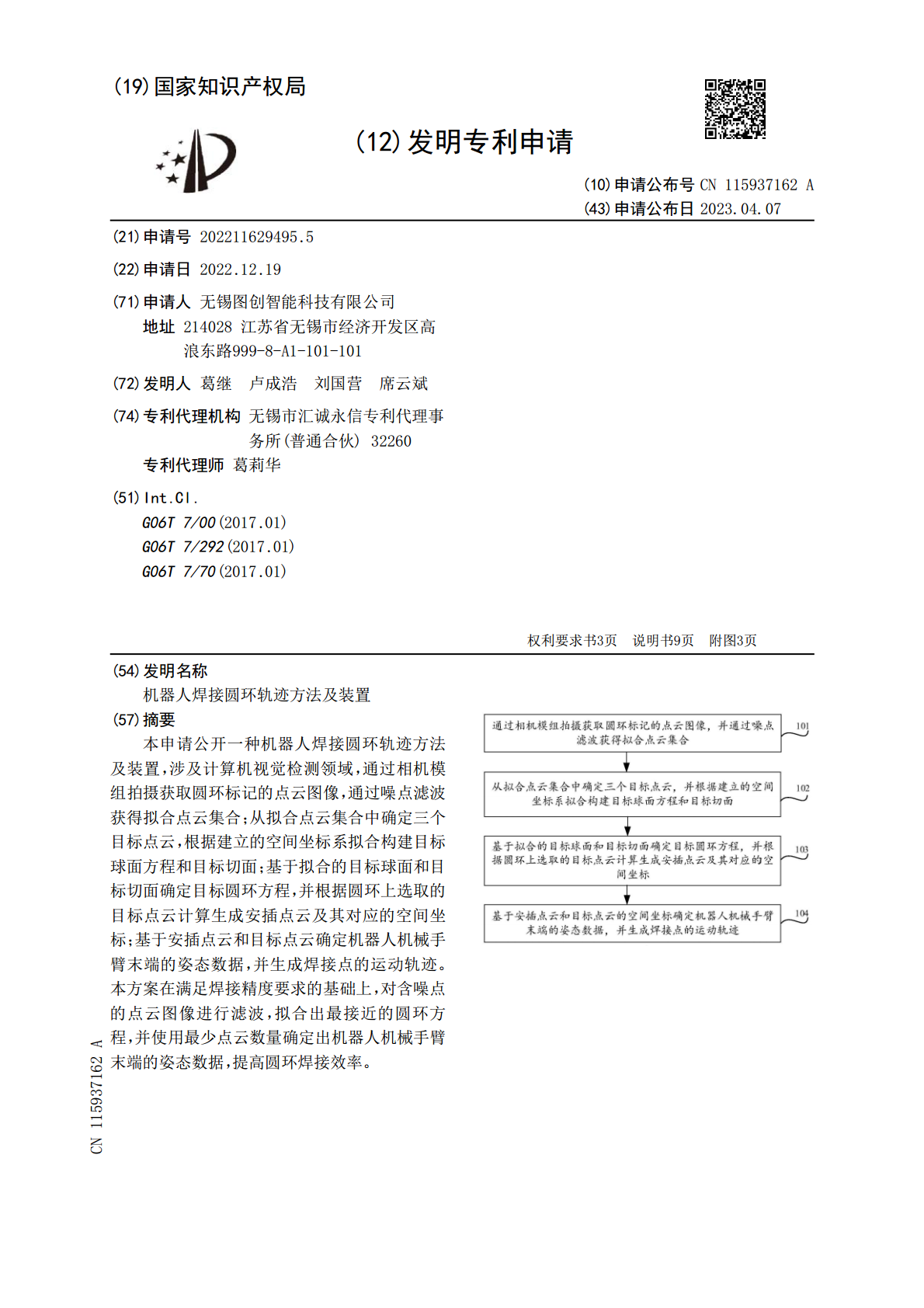
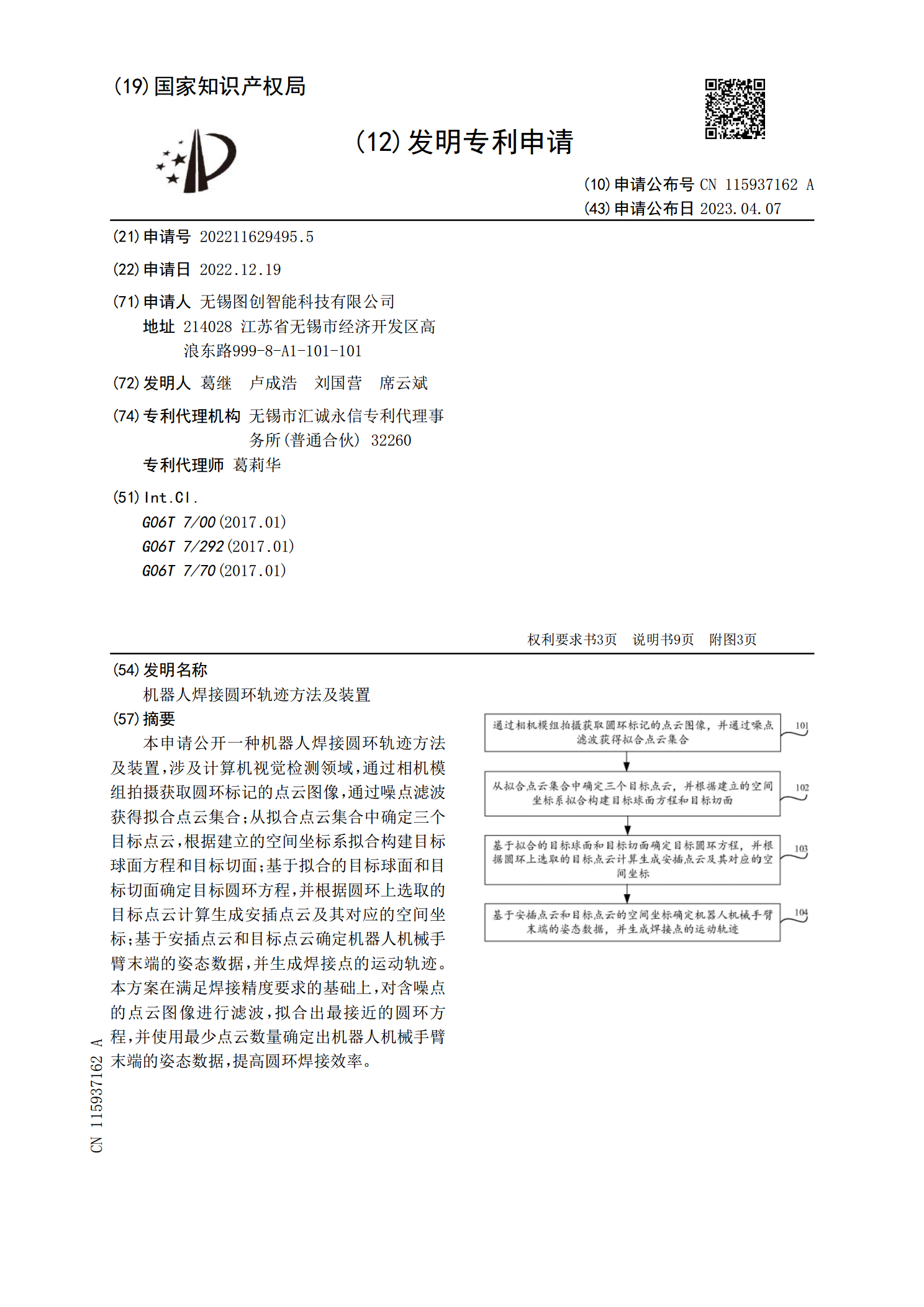
本申请公开一种机器人焊接圆环轨迹方法及装置,涉及计算机视觉检测领域,通过相机模组拍摄获取圆环标记的点云图像,通过噪点滤波获得拟合点云集合;从拟合点云集合中确定三个目标点云,根据建立的空间坐标系拟合构建目标球面方程和目标切面;基于拟合的目标球面和目标切面确定目标圆环方程,并根据圆环上选取的目标点云计算生成安插点云及其对应的空间坐标;基于安插点云和目标点云确定机器人机械手臂末端的姿态数据,并生成焊接点的运动轨迹。本方案在满足焊接精度要求的基础上,对含噪点的点云图像进行滤波,拟合出最接近的圆环方程,并使用最少点

罐体椭圆环缝机器人焊接系统.pdf
本发明涉及一种机器人焊接系统,特别涉及一种罐体椭圆环缝机器人焊接系统。包括XYZ三轴天轨行走机构、机器人焊接系统、焊接电源、伺服滚轮架翻转变位机及变位机行走轨道,其中伺服滚轮架翻转变位机可滑动地安装在变位机行走轨道上,XYZ三轴天轨行走机构设置于变位机行走轨道的一侧,机器人焊接系统设置于XYZ三轴天轨行走机构上、且与焊接电源电连接,机器人焊接系统可沿X、Y、Z轴方向作直线运动。本发明通过机器人焊接系统的X、Y、Z三轴的直线运动,并带动工件做不规则的旋转运动,配合机器人焊枪实现工件的各种角度的焊接。

焊接机器人轨迹规划.pdf
焊接机器人轨迹规划随着工业化进程的不断推进,现代制造业对于生产效率和质量的要求越来越高。为了提高生产效率和产品质量,焊接机器人被广泛应用于汽车、航空航天、电子、机械等领域。然而,焊接机器人在生产过程中,需要遵循一定的轨迹来完成工作,轨迹规划就成为了影响焊接机器人效率和质量的重要因素。一、轨迹规划的定义和作用轨迹规划,是指对机器人的运动轨迹进行规定,使其符合工作要求的一种技术。它是机器人技术中的一个重要研究方向,也是机器人技术中最具挑战性的问题之一。轨迹规划对于焊接机器人来说,具有以下重要作用:1、提高焊接
机器人活动部件的轨迹分析方法及装置、机器人设备.pdf
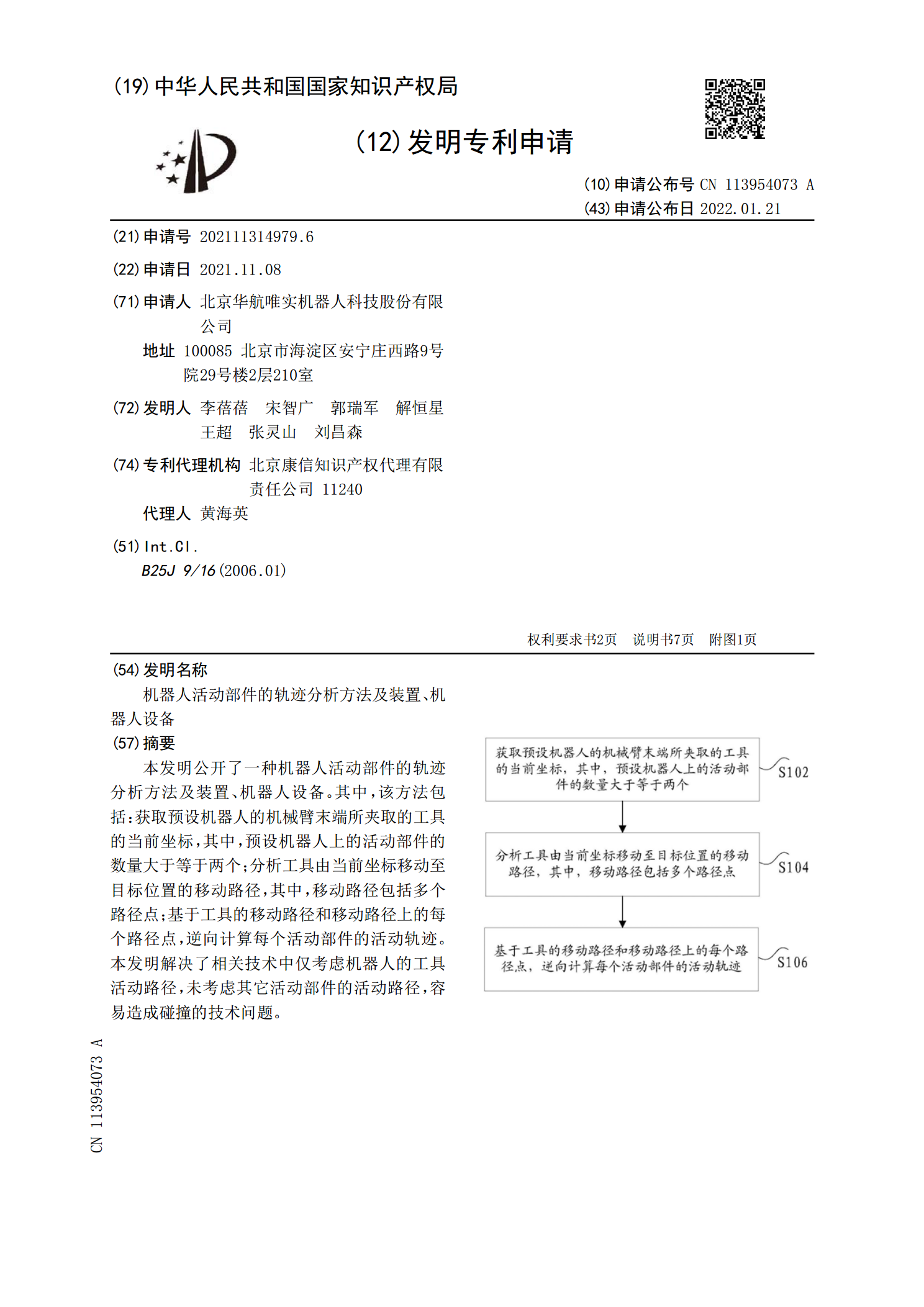
本发明公开了一种机器人活动部件的轨迹分析方法及装置、机器人设备。其中,该方法包括:获取预设机器人的机械臂末端所夹取的工具的当前坐标,其中,预设机器人上的活动部件的数量大于等于两个;分析工具由当前坐标移动至目标位置的移动路径,其中,移动路径包括多个路径点;基于工具的移动路径和移动路径上的每个路径点,逆向计算每个活动部件的活动轨迹。本发明解决了相关技术中仅考虑机器人的工具活动路径,未考虑其它活动部件的活动路径,容易造成碰撞的技术问题。
一种机器人焊接轨迹自动生成方法.pdf
本发明公开了一种机器人焊接轨迹自动生成方法,用于机器人自动焊接系统,包括以下步骤:1)建立焊缝基本轨迹库;2)生成所有焊缝的截取、旋转、比例变换和平移变换的变换参数;3)依据其类型选择对应的基本轨迹,依据变换参数进行变换,生成新的焊缝轨迹;4)选择另一条焊缝,使用S3中的方法进行变换,可以得到新的轨迹点集;该方法适用于工件焊缝数量多而种类少的情形,操作简单,提高了机器人焊接效率;使得操作应用较为便捷;支持多种类型焊缝,通用性比较好。