
车辆及纠正其跑偏的方法和装置以及电动助力转向系统.pdf

fa****楠吖

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车辆及纠正其跑偏的方法和装置以及电动助力转向系统.pdf
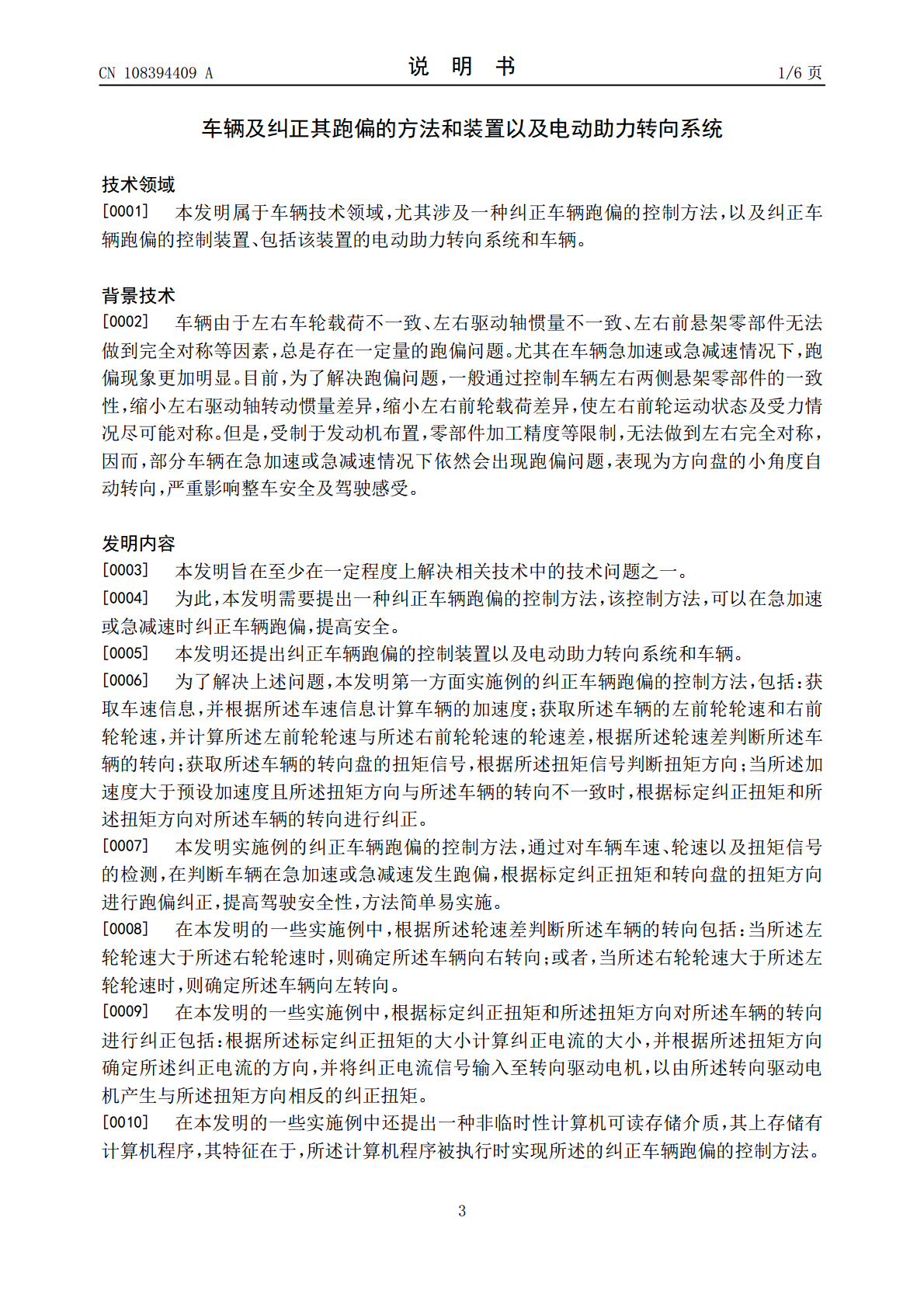
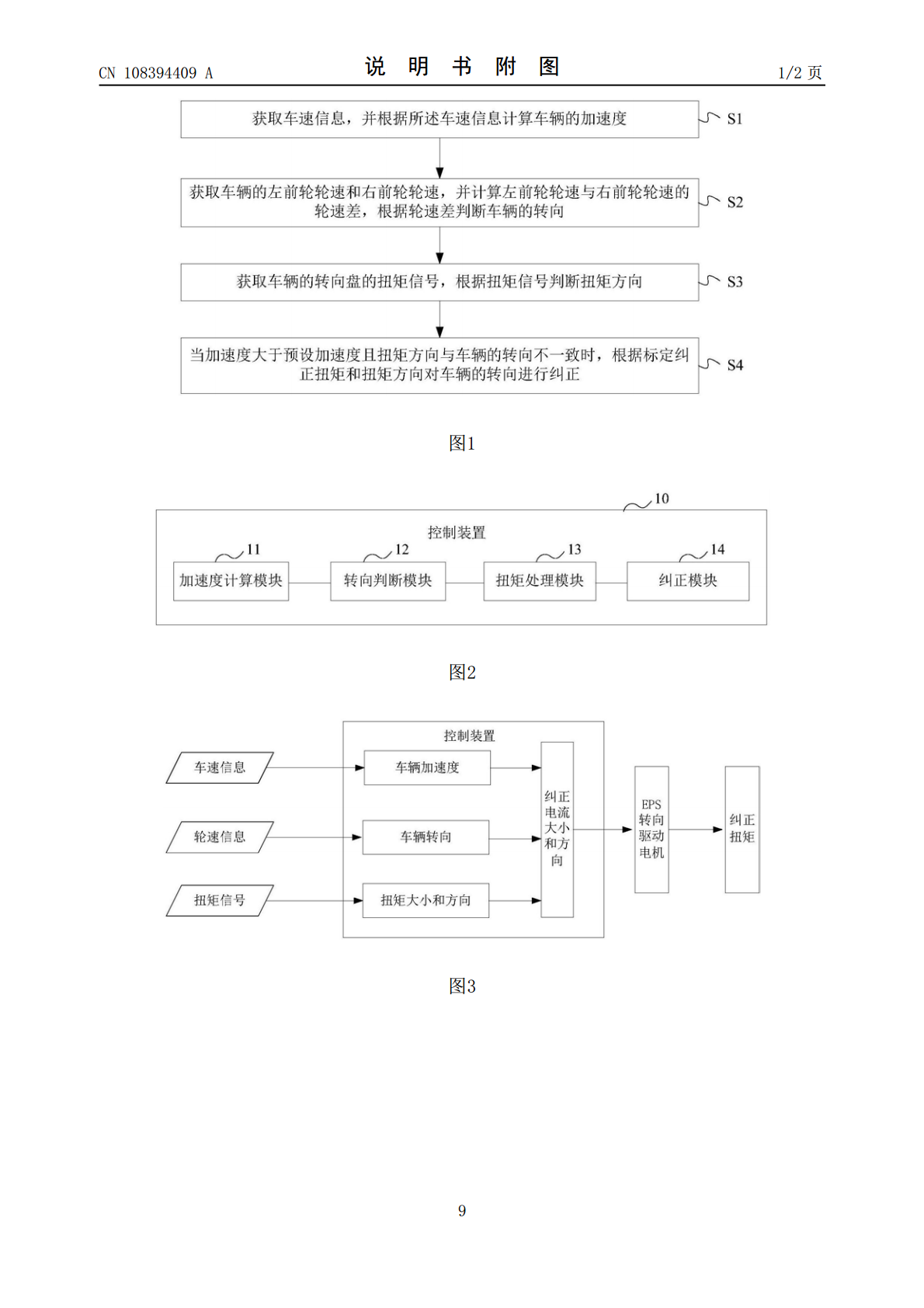
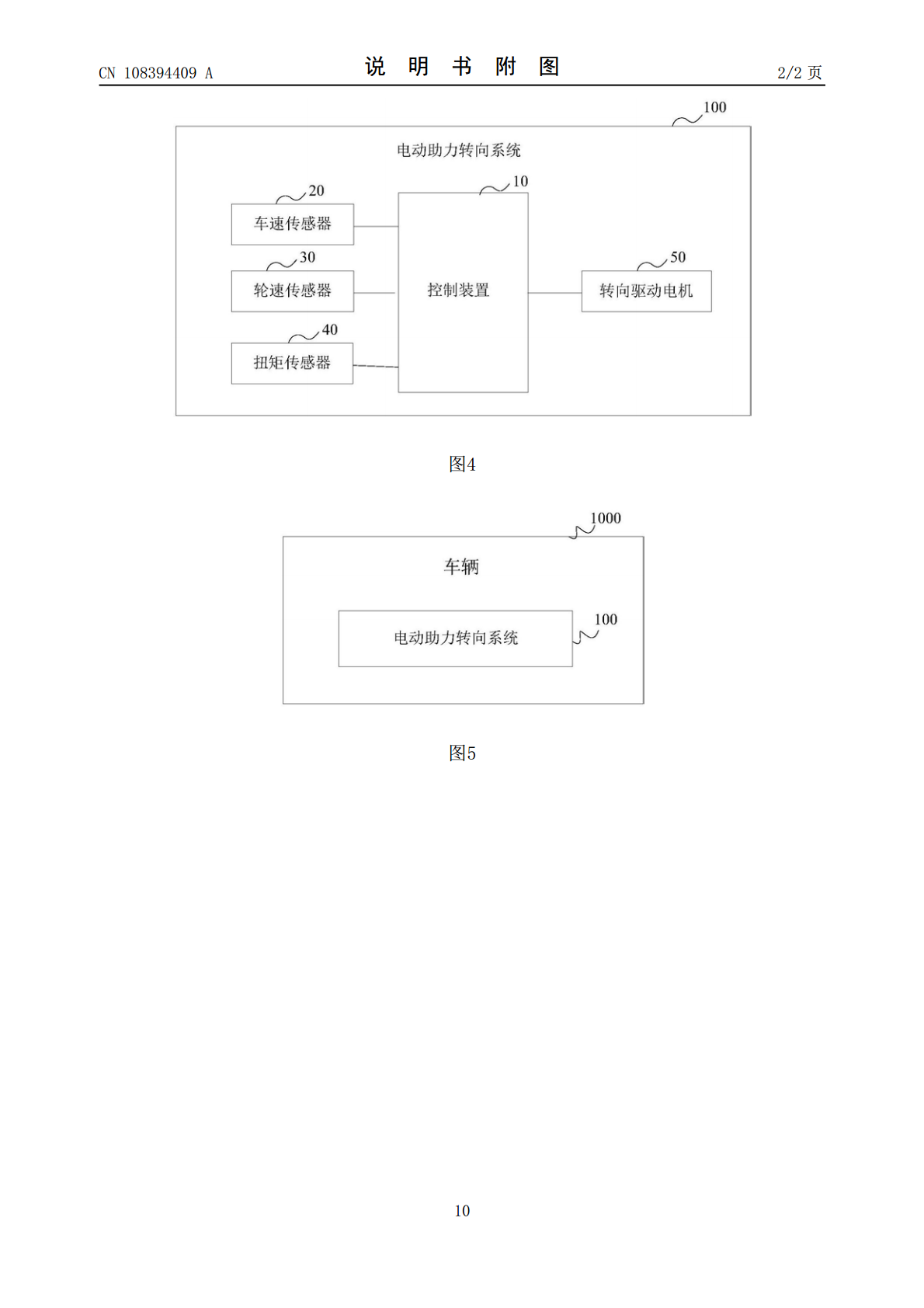
本发明公开了一种车辆及纠正其跑偏的控制方法和控制装置及电动助力转向系统,其中,该纠正车辆跑偏的控制方法包括:获取车速信息,并根据车速信息计算车辆的加速度;获取车辆的左前轮轮速和右前轮轮速,并计算左前轮轮速与右前轮轮速的轮速差,根据轮速差判断车辆的转向;获取车辆的转向盘的扭矩信号,根据扭矩信号判断扭矩方向;当加速度大于预设加速度且扭矩方向与车辆的转向不一致时,根据标定纠正扭矩和扭矩方向对车辆的转向进行纠正。在车辆急加速或急减速发生跑偏时可以及时纠正,保证驾驶安全。

电动助力转向系统及其跑偏补偿方法.pdf
本发明涉及汽车控制领域,其实施方式提供了一种电动助力转向系统的跑偏补偿方法,包括:基于所需补偿的齿条力确定助力电机的拟补偿电流,所述跑偏补偿方法还包括:对所述拟补偿电流进行修正后得到实际补偿电流,所述修正与所述实际补偿电流的历史序列相关。同时还提供了一种电动助力转向系统,以及包含该电动助力转向系统的车辆。本发明提供的实施方式提升了电动助力转向系统产品的适用性和驾驶员的驾驶体验。
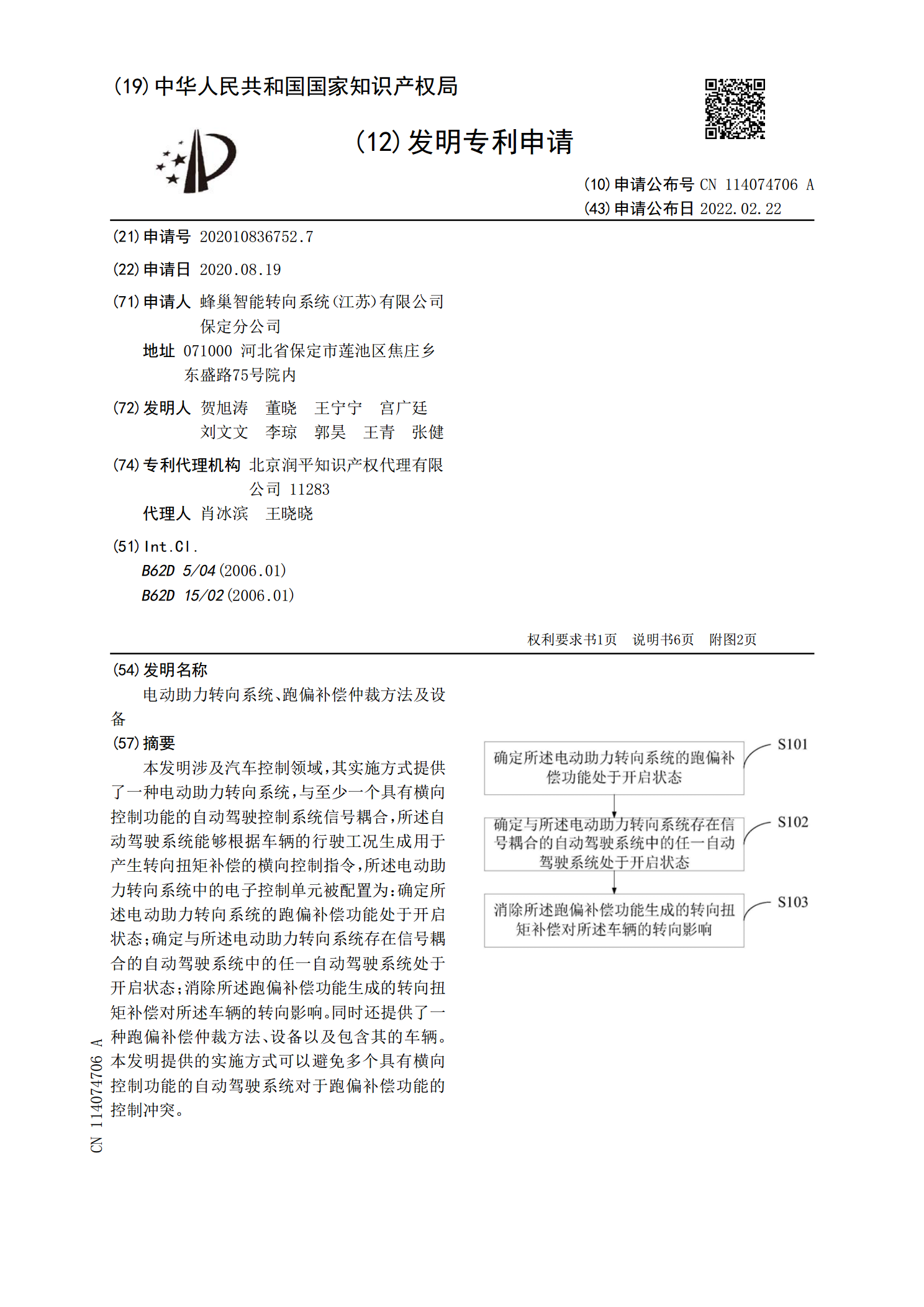
电动助力转向系统、跑偏补偿仲裁方法及设备.pdf
本发明涉及汽车控制领域,其实施方式提供了一种电动助力转向系统,与至少一个具有横向控制功能的自动驾驶控制系统信号耦合,所述自动驾驶系统能够根据车辆的行驶工况生成用于产生转向扭矩补偿的横向控制指令,所述电动助力转向系统中的电子控制单元被配置为:确定所述电动助力转向系统的跑偏补偿功能处于开启状态;确定与所述电动助力转向系统存在信号耦合的自动驾驶系统中的任一自动驾驶系统处于开启状态;消除所述跑偏补偿功能生成的转向扭矩补偿对所述车辆的转向影响。同时还提供了一种跑偏补偿仲裁方法、设备以及包含其的车辆。本发明提供的实施
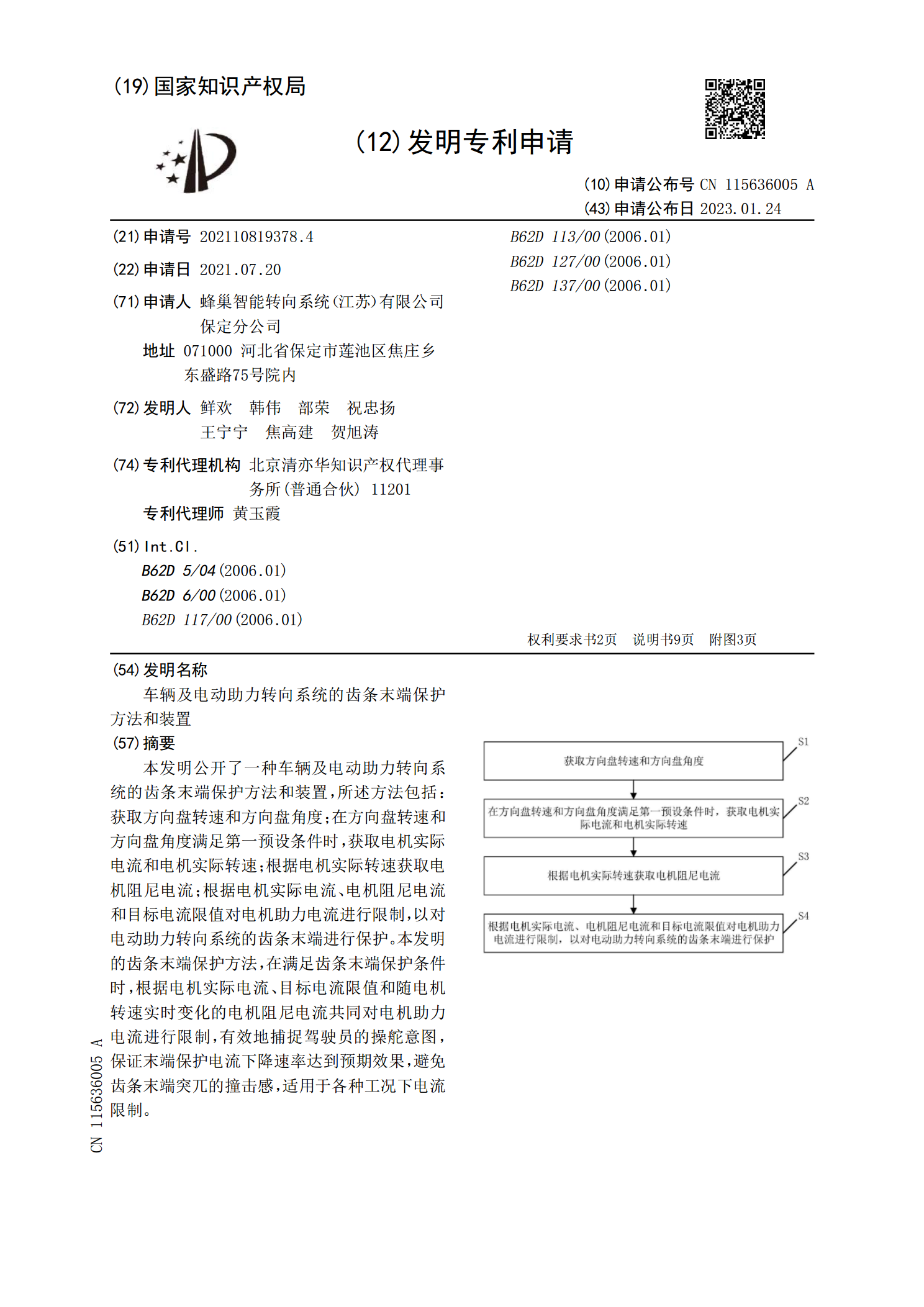
车辆及电动助力转向系统的齿条末端保护方法和装置.pdf
本发明公开了一种车辆及电动助力转向系统的齿条末端保护方法和装置,所述方法包括:获取方向盘转速和方向盘角度;在方向盘转速和方向盘角度满足第一预设条件时,获取电机实际电流和电机实际转速;根据电机实际转速获取电机阻尼电流;根据电机实际电流、电机阻尼电流和目标电流限值对电机助力电流进行限制,以对电动助力转向系统的齿条末端进行保护。本发明的齿条末端保护方法,在满足齿条末端保护条件时,根据电机实际电流、目标电流限值和随电机转速实时变化的电机阻尼电流共同对电机助力电流进行限制,有效地捕捉驾驶员的操舵意图,保证末端保护电
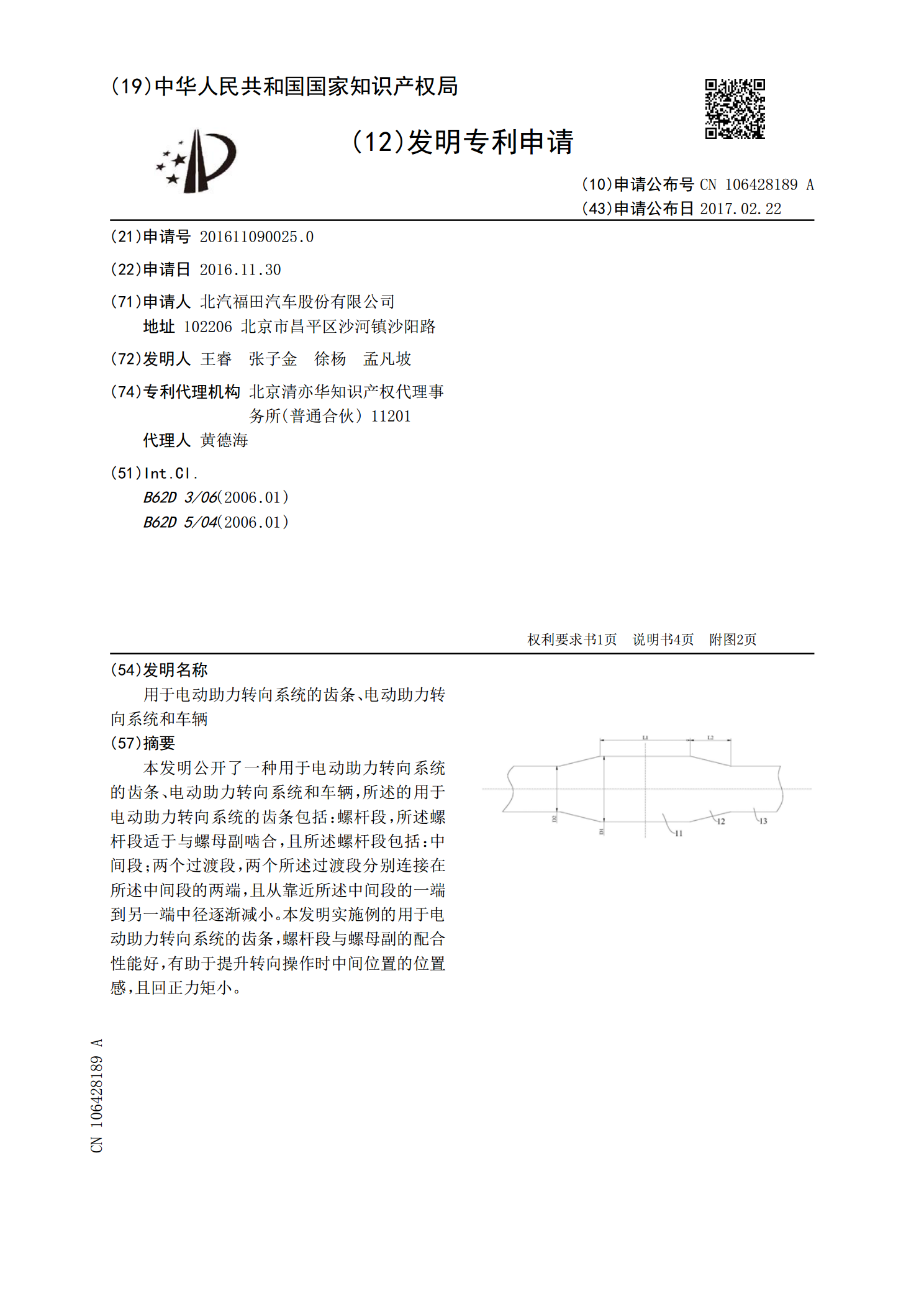
用于电动助力转向系统的齿条、电动助力转向系统和车辆.pdf
本发明公开了一种用于电动助力转向系统的齿条、电动助力转向系统和车辆,所述的用于电动助力转向系统的齿条包括:螺杆段,所述螺杆段适于与螺母副啮合,且所述螺杆段包括:中间段;两个过渡段,两个所述过渡段分别连接在所述中间段的两端,且从靠近所述中间段的一端到另一端中径逐渐减小。本发明实施例的用于电动助力转向系统的齿条,螺杆段与螺母副的配合性能好,有助于提升转向操作时中间位置的位置感,且回正力矩小。