
一种管道自适应机器人行走系统.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管道自适应机器人行走系统.pdf
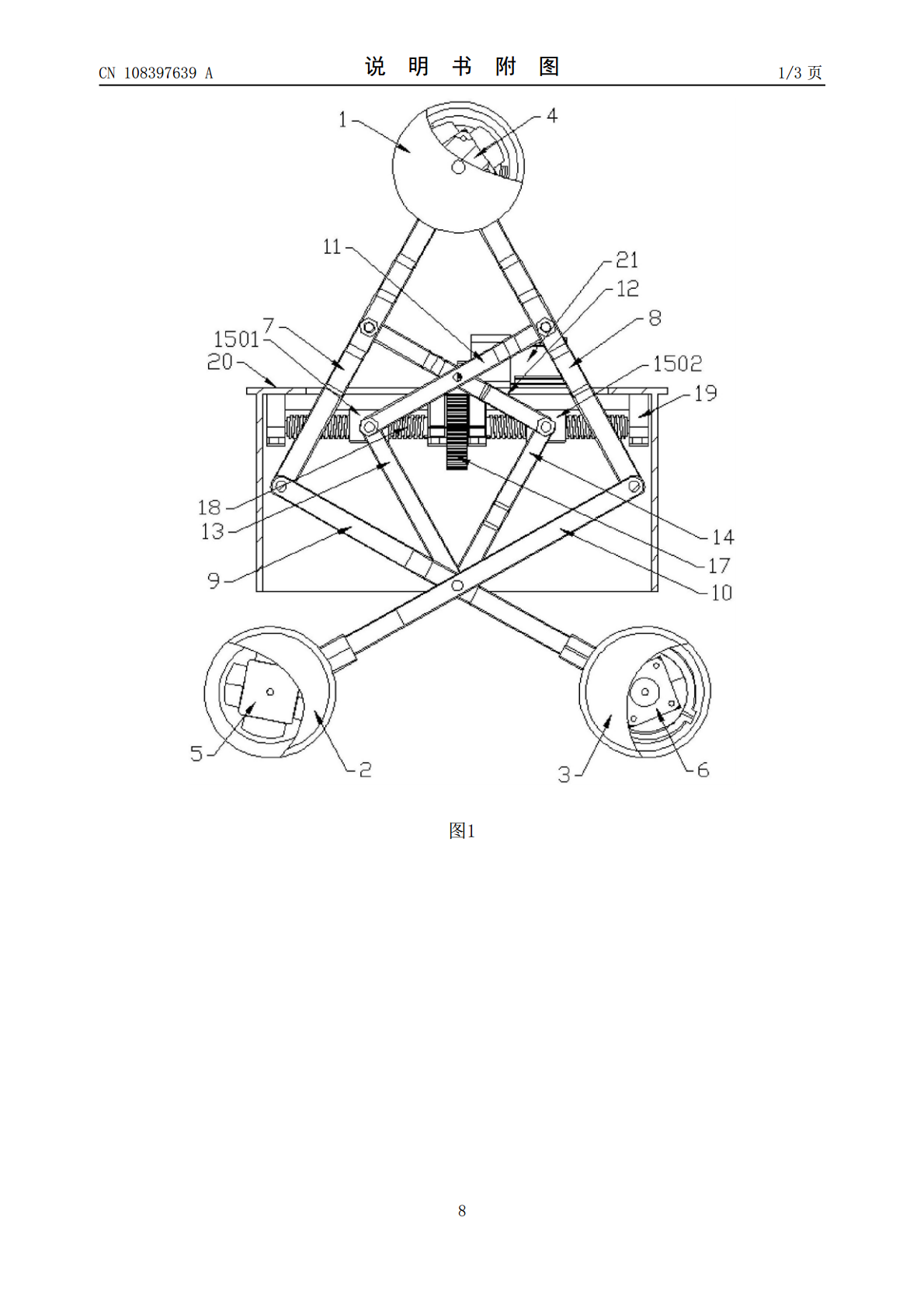
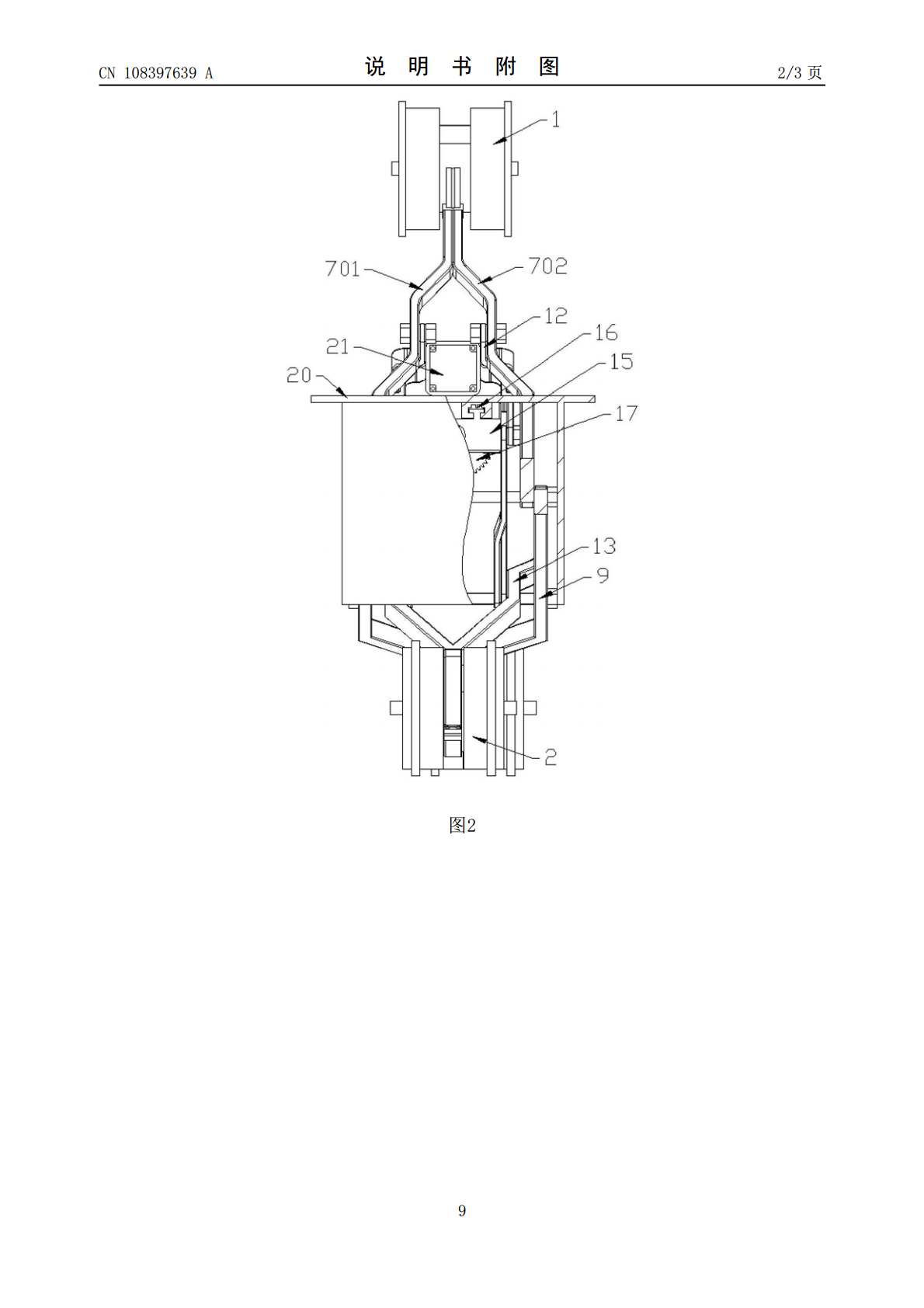
本发明公开了一种管道自适应机器人行走系统,系统包括上驱动轮、下面轮和下驱动轮,上驱动轮、下面轮和下驱动轮之间相互形成以上驱动轮为顶角的等腰三角形,等腰三角形的顶角与底边之间的位置处设有立方体型的壳体,壳体内为工作区;本发明可以通过结构改变具有一定的适应能力,可以很方便的适应不同管径的管道,保证良好的驱动效果。同时,系统采用三点式结构,利用机器人底部两个驱动轮和顶部一个驱动轮构成三角形,提高了管道自适应机器人的稳定性和负载能力。通过电机与轮子的组合降低了结构复杂性,提高了结构的可靠性。
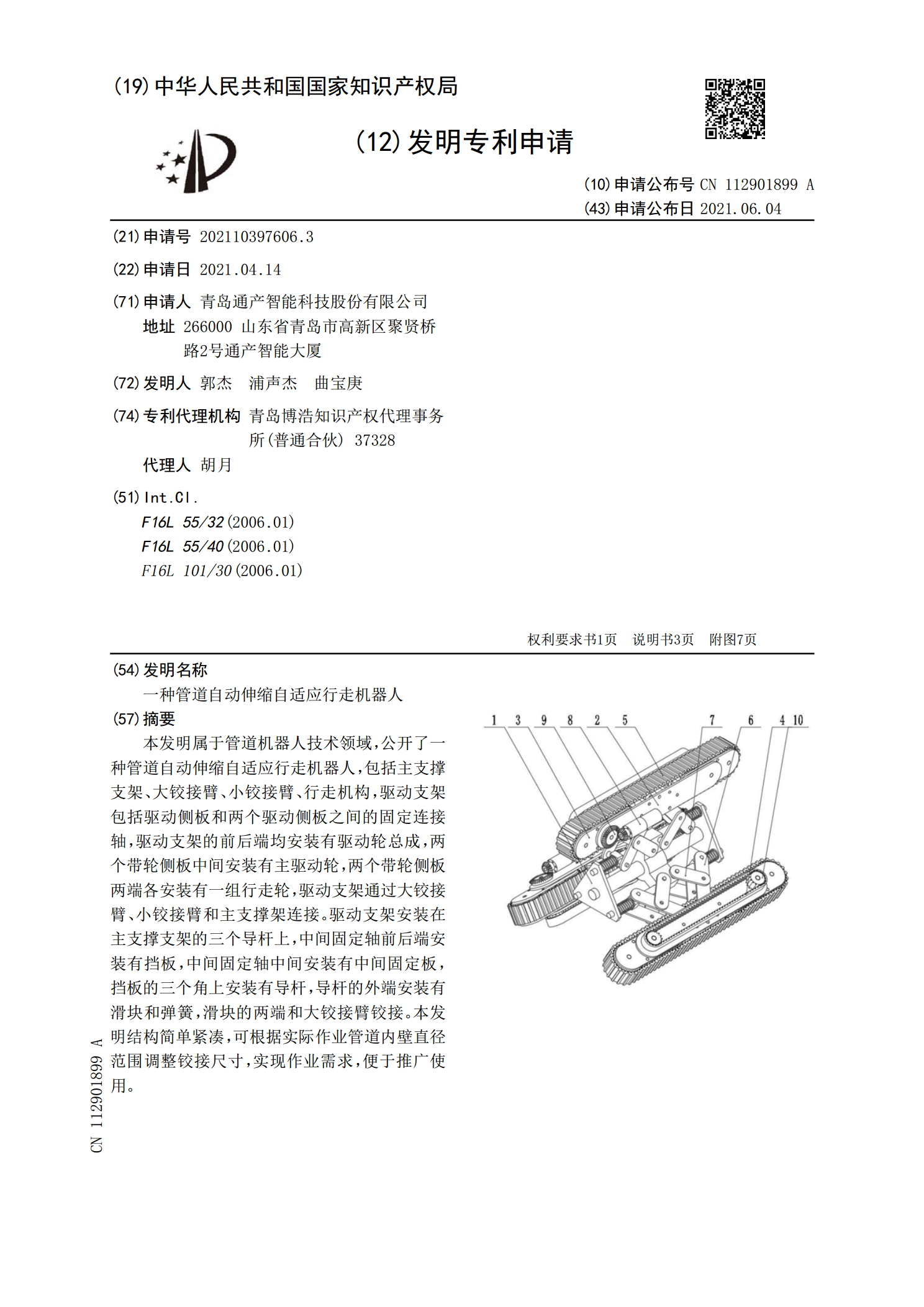
一种管道自动伸缩自适应行走机器人.pdf
本发明属于管道机器人技术领域,公开了一种管道自动伸缩自适应行走机器人,包括主支撑支架、大铰接臂、小铰接臂、行走机构,驱动支架包括驱动侧板和两个驱动侧板之间的固定连接轴,驱动支架的前后端均安装有驱动轮总成,两个带轮侧板中间安装有主驱动轮,两个带轮侧板两端各安装有一组行走轮,驱动支架通过大铰接臂、小铰接臂和主支撑架连接。驱动支架安装在主支撑支架的三个导杆上,中间固定轴前后端安装有挡板,中间固定轴中间安装有中间固定板,挡板的三个角上安装有导杆,导杆的外端安装有滑块和弹簧,滑块的两端和大铰接臂铰接。本发明结构简单

行走系统及管道机器人.pdf
本发明行走系统及管道机器人涉及机器人技术领域。其目的是为了提供一种体积小、适用性强的行走系统及具有这种行走系统的管道机器人。本发明管道机器人包括行走系统、淤泥输送系统和淤泥粉碎系统。行走系统包括行走动力机构、行走履带机构、机体支撑机构和履带导向涨紧机构,行走动力机构用于向系统提供动力,机体支撑机构包括承重轮,承重轮安装在承重轮支架上,承重轮支架与第一伸缩油缸的活塞杆连接,履带导向涨紧机构包括第二伸缩油缸,第二伸缩油缸的活塞杆连接涨紧支架,带动涨紧轮运动,涨紧轮与履带内侧面相接触。淤泥输送系统包括输送泵体总
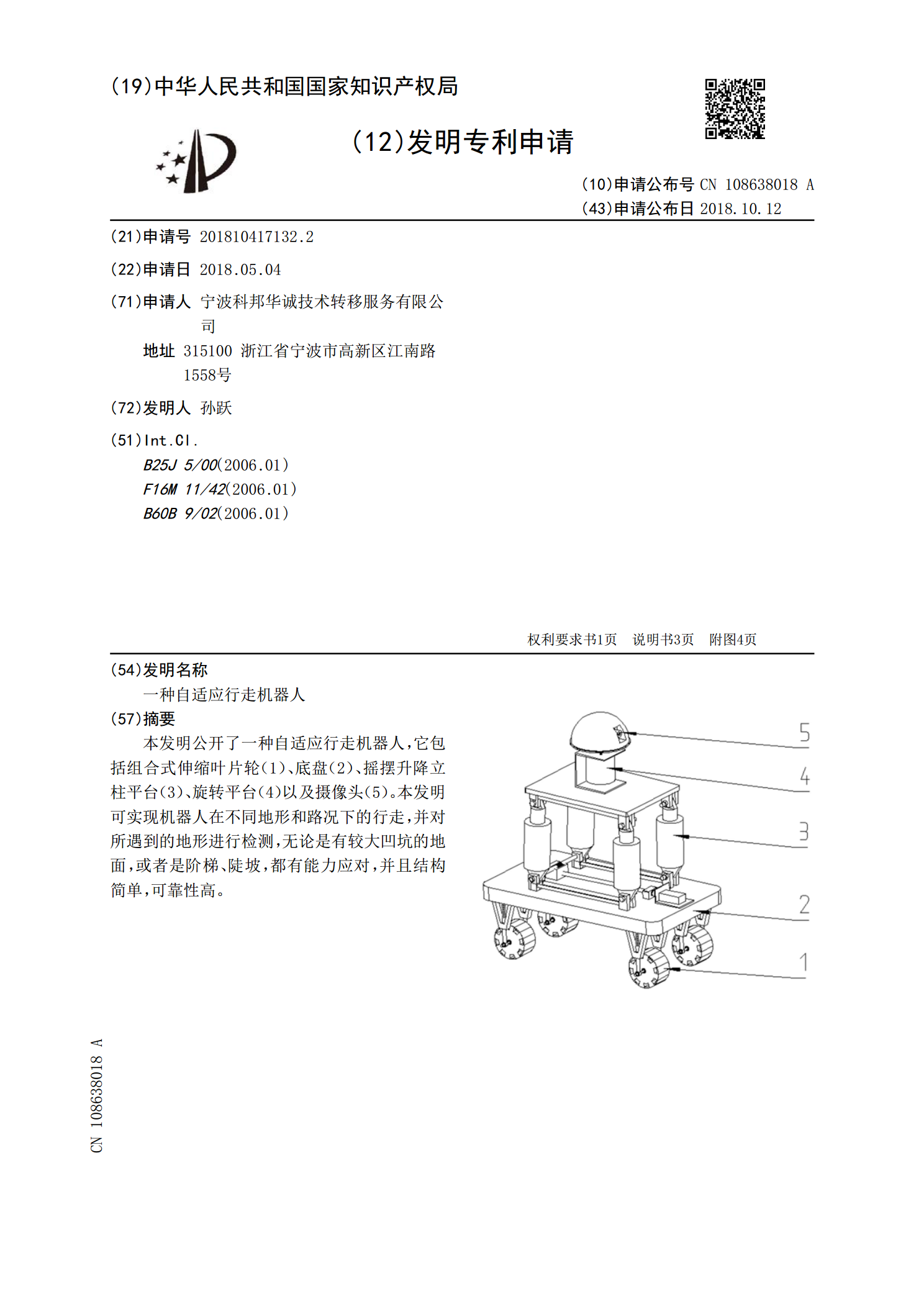
一种自适应行走机器人.pdf
本发明公开了一种自适应行走机器人,它包括组合式伸缩叶片轮(1)、底盘(2)、摇摆升降立柱平台(3)、旋转平台(4)以及摄像头(5)。本发明可实现机器人在不同地形和路况下的行走,并对所遇到的地形进行检测,无论是有较大凹坑的地面,或者是阶梯、陡坡,都有能力应对,并且结构简单,可靠性高。

一种自适应式履带行走系统和自适应式履带机器人.pdf
本发明公开了一种自适应式履带行走系统和自适应式履带机器人,所述自适应式履带行走系统包括:前轮机构和后轮机构及履带;所述前轮机构包括前摆臂、主动轮、前弹簧悬挂、前托带轮及前桥车轮;所述后轮机构包括后摆臂、后弹簧悬挂、后托带轮及后桥车轮;所述履带依次套设在所述前托带轮、所述主动轮、所述前桥车轮、所述后桥车轮及后托带轮上。本发明可以无需人为干预,在遇到障碍物时会自动改变履带形状去适应变化的地形,具有结构简单、自适应能力强的特点,可大幅度地降低操控履带式机器人的难度,并使履带式机器人的通过能力获得大幅提升。