
一种自适应式履带行走系统和自适应式履带机器人.pdf

一条****杉淑


1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自适应式履带行走系统和自适应式履带机器人.pdf
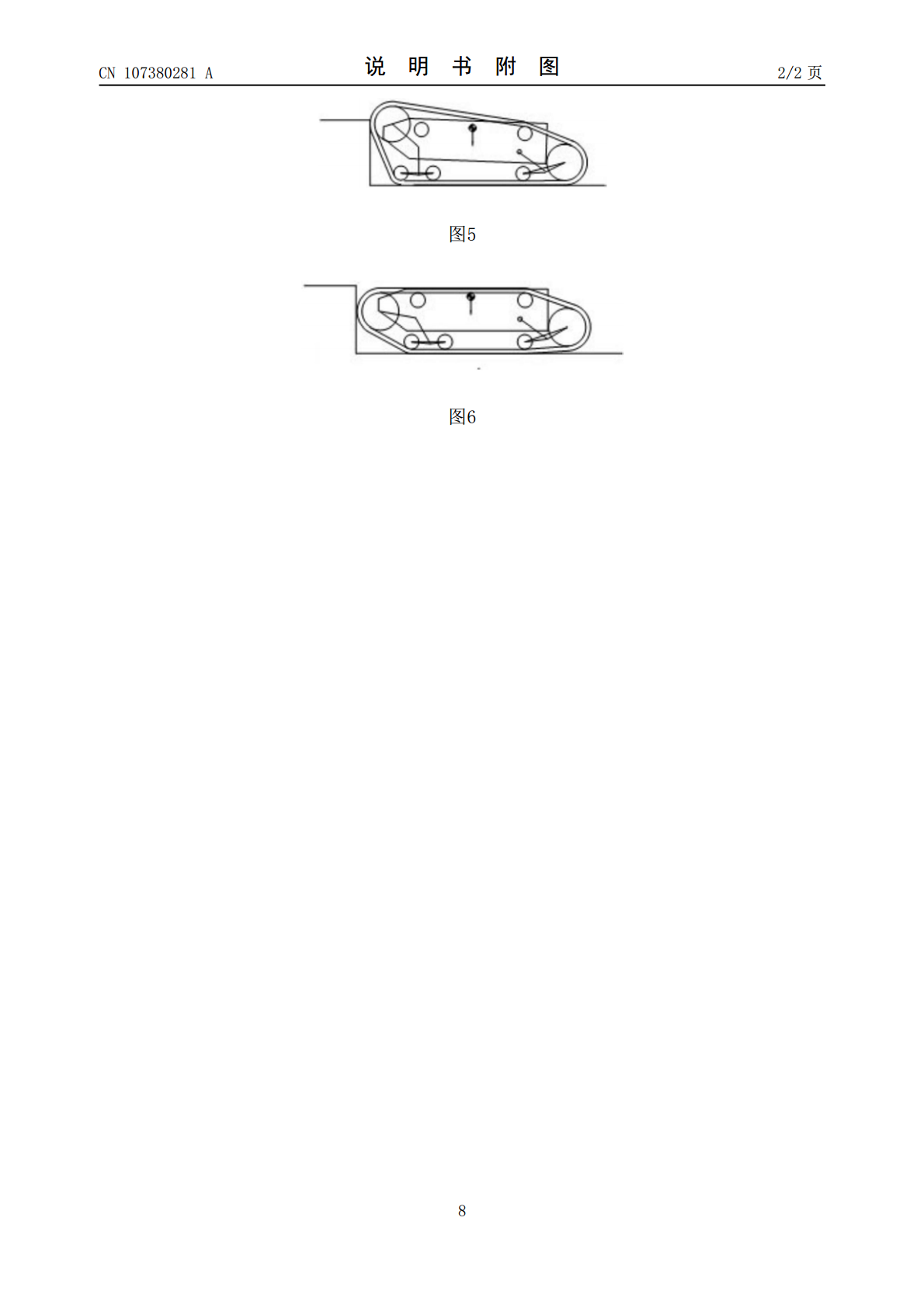
本发明公开了一种自适应式履带行走系统和自适应式履带机器人,所述自适应式履带行走系统包括:前轮机构和后轮机构及履带;所述前轮机构包括前摆臂、主动轮、前弹簧悬挂、前托带轮及前桥车轮;所述后轮机构包括后摆臂、后弹簧悬挂、后托带轮及后桥车轮;所述履带依次套设在所述前托带轮、所述主动轮、所述前桥车轮、所述后桥车轮及后托带轮上。本发明可以无需人为干预,在遇到障碍物时会自动改变履带形状去适应变化的地形,具有结构简单、自适应能力强的特点,可大幅度地降低操控履带式机器人的难度,并使履带式机器人的通过能力获得大幅提升。

一种履带式被动自适应机器人.pdf
本发明涉及一种履带式被动自适应机器人,包括车体模块、安装在车体模块前后的两个减震模块、安装在车体模块上部的信息采集模块及安装在车体模块两侧的四个履带式车轮;一个减震模块的两端连接两个履带式车轮;四个履带式车轮结构完全相同,围绕车体模块呈前后左右对称布置;每个履带式车轮均包括履带、带轮结构和带传动体,所述带传动体一方面与车体模块连接,另一方面与带轮结构连接;在带轮结构外表面安装履带;所述带轮结构包括六个传动齿轮、两个行星支撑架、四个中心轴、两个中心齿轮及两个行星齿轮。该机器人的每个履带式车轮均通过一个电机驱

履带式行走机器人.doc
长春工业大学毕业设计论文1绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。在制造、装配及服务行业,机器入的应用取得了明显的进步。由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、

一种行走系统及履带式行走机械.pdf
本申请公开了一种行走系统。本申请还提供一种使用上述行走系统的履带式移动机械。本申请提供的行走系统及履带式行走机械,设置柔性可上下移动的驱动轮组件,改变行走系统爬楼梯或越障时履带的接地长度,增强越障的有效越障力,同时解决倒车时驱动轮刚性硬着陆对机器人冲击大的问题,减小对机器人的损伤。

履带式自适应管道爬行器.pdf
本发明公开了一种履带式自适应管道爬行器,包括夹持单元、爬行单元和控制单元;爬行单元包括两套履带单元,两个从动锥齿轮、两个张紧轮和一个主动锥齿轮,共同与锥形齿履带传动连接,构成一套履带单元;控制单元包括电控盒,电控盒还与所有同步电机控制连接,每个同步电机分别设置有一个扭矩传感器。本发明的履带式自适应管道爬行器,解决了现有技术不能适应水平井和大位移井不同管径的电缆铺设,驱动力不足,不能克服弯曲管道的爬行,内外侧速度不一致,井段附着力差的问题。可应用于石油勘探,城市管道铺设等场合。