
一种汽车驱动车轮防滑控制方法和装置.pdf

文库****坚白


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种汽车驱动车轮防滑控制方法和装置.pdf
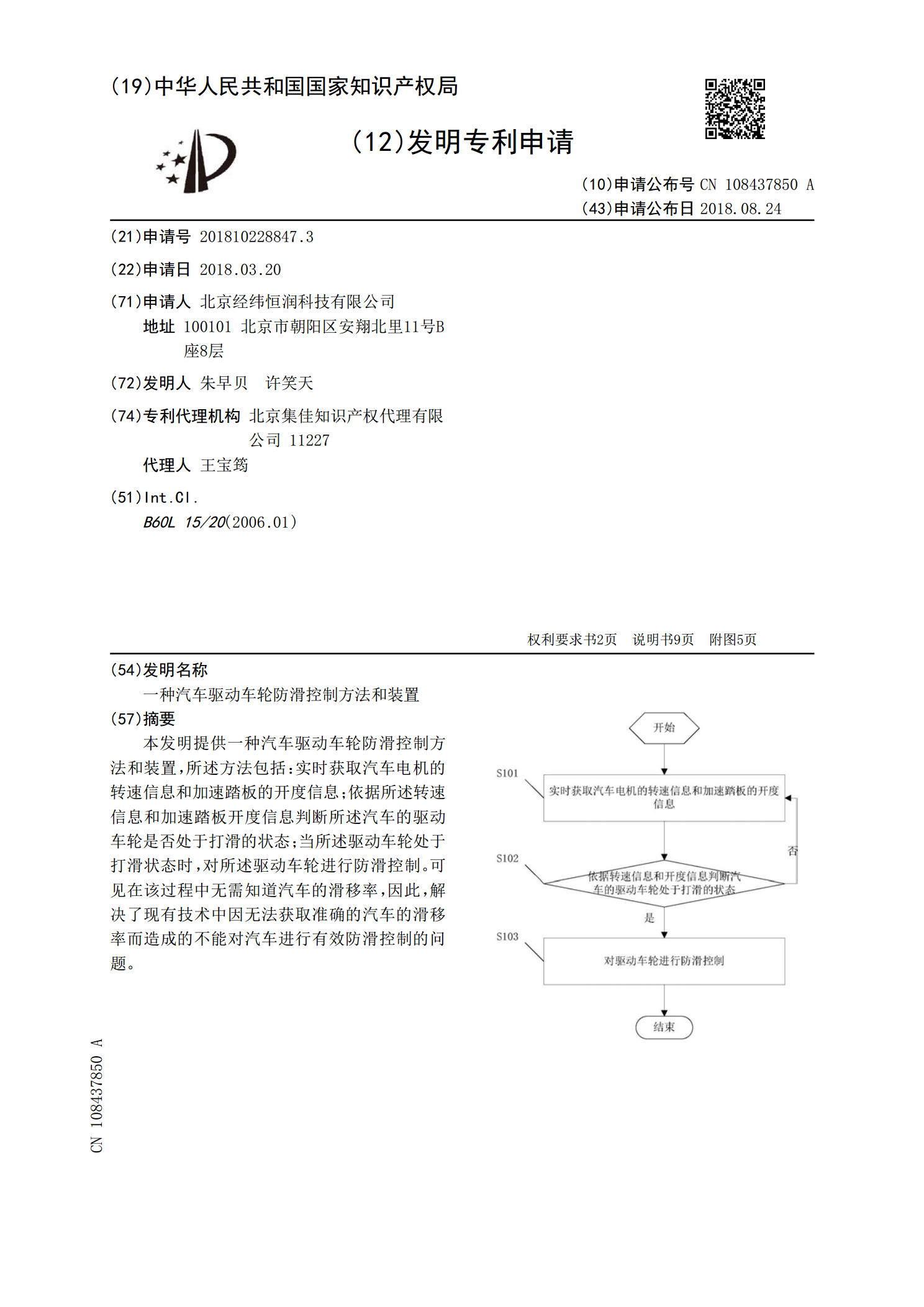
本发明提供一种汽车驱动车轮防滑控制方法和装置,所述方法包括:实时获取汽车电机的转速信息和加速踏板的开度信息;依据所述转速信息和加速踏板开度信息判断所述汽车的驱动车轮是否处于打滑的状态;当所述驱动车轮处于打滑状态时,对所述驱动车轮进行防滑控制。可见在该过程中无需知道汽车的滑移率,因此,解决了现有技术中因无法获取准确的汽车的滑移率而造成的不能对汽车进行有效防滑控制的问题。
一种汽车车轮驱动防滑转控制方法.pdf
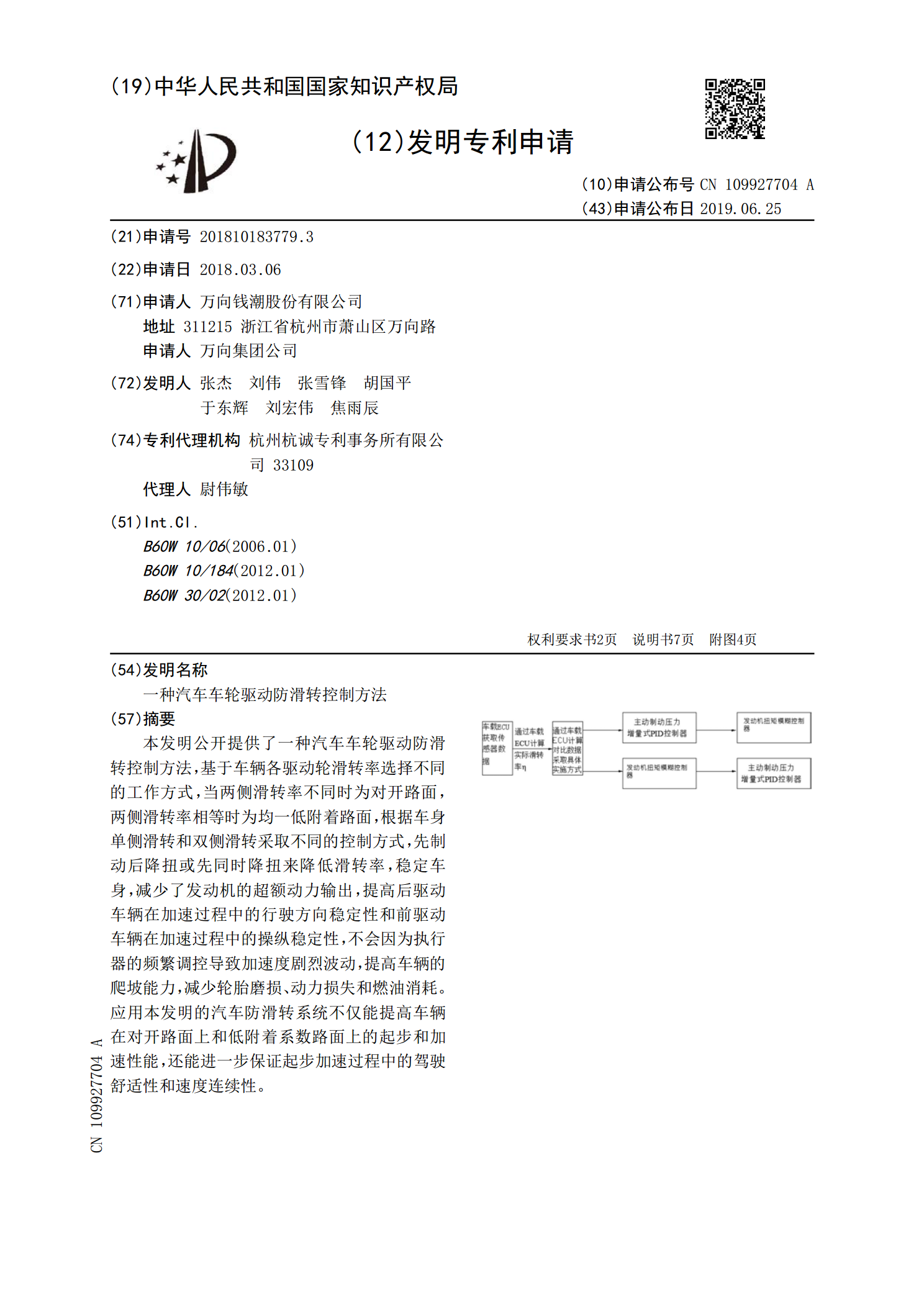
本发明公开提供了一种汽车车轮驱动防滑转控制方法,基于车辆各驱动轮滑转率选择不同的工作方式,当两侧滑转率不同时为对开路面,两侧滑转率相等时为均一低附着路面,根据车身单侧滑转和双侧滑转采取不同的控制方式,先制动后降扭或先同时降扭来降低滑转率,稳定车身,减少了发动机的超额动力输出,提高后驱动车辆在加速过程中的行驶方向稳定性和前驱动车辆在加速过程中的操纵稳定性,不会因为执行器的频繁调控导致加速度剧烈波动,提高车辆的爬坡能力,减少轮胎磨损、动力损失和燃油消耗。应用本发明的汽车防滑转系统不仅能提高车辆在对开路面上和低

四驱电动汽车的驱动防滑控制方法和装置.pdf
本发明公开了一种四驱电动汽车的驱动防滑控制方法和装置,其中,驱动防滑控制方法包括以下步骤:检测电动汽车的四个车轮的轮速和油门踏板的深度;根据四个车轮的轮速估算电动汽车的车速,并根据车速确定车速与轮速之间的目标差值,以及根据油门踏板的深度获取电动汽车的需求扭矩;根据轮速、车速、目标差值和需求扭矩对与轮速对应的车轮进行驱动防滑控制。由此,能够使轮速和车速的差值稳定在对应的目标差值范围内,以保持适合的滑移率,且无需进行路面识别,减小了因路面识别所造成的误差,具有实用价值。

四驱电动汽车的驱动防滑控制方法和装置.pdf
本发明公开了一种四驱电动汽车的驱动防滑控制方法和装置,其中,控制方法包括以下步骤:检测电动汽车的四个车轮的轮速和油门踏板的深度;根据四个车轮的轮速估算电动汽车的车速,并根据四个车轮的轮速和车速确定电动汽车的所处路况,以及根据油门踏板的深度获取电动汽车的需求扭矩,其中,路况包括低附起步路面、对接路面、对开路面;根据路况和需求扭矩分别对四个车轮进行驱动防滑控制。该控制方法能够保证电动汽车启动驱动防滑功能后车轮不飞转、电动汽车不发生侧偏、横摆角速度在一定范围内,且能够最大限度的利用地面附着力,提升电动汽车的脱困

一种车轮防滑装置及其控制方法.pdf
本发明涉及一种车轮防滑装置及其控制方法,包括控制系统、驱动系统和发电系统。控制系统利用ABS的功能向车轮防滑装置发送无线信号,控制车轮防滑装置的工作,驱动系统采用双推拉杆带动伸缩柱和抓地装置工作,有效防止车轮在冰雪地面打滑。发电系统采用惯性飞轮发电,保证了车轮防滑装置的用电。本发明具有操作简单、安全可靠、结构合理、装卸容易、惯性发电、节省能源等优点。