
用于对车辆上的车轮中的车轮不平衡度的方位角度位置进行探测的方法和装置.pdf

邻家****mk

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于对车辆上的车轮中的车轮不平衡度的方位角度位置进行探测的方法和装置.pdf
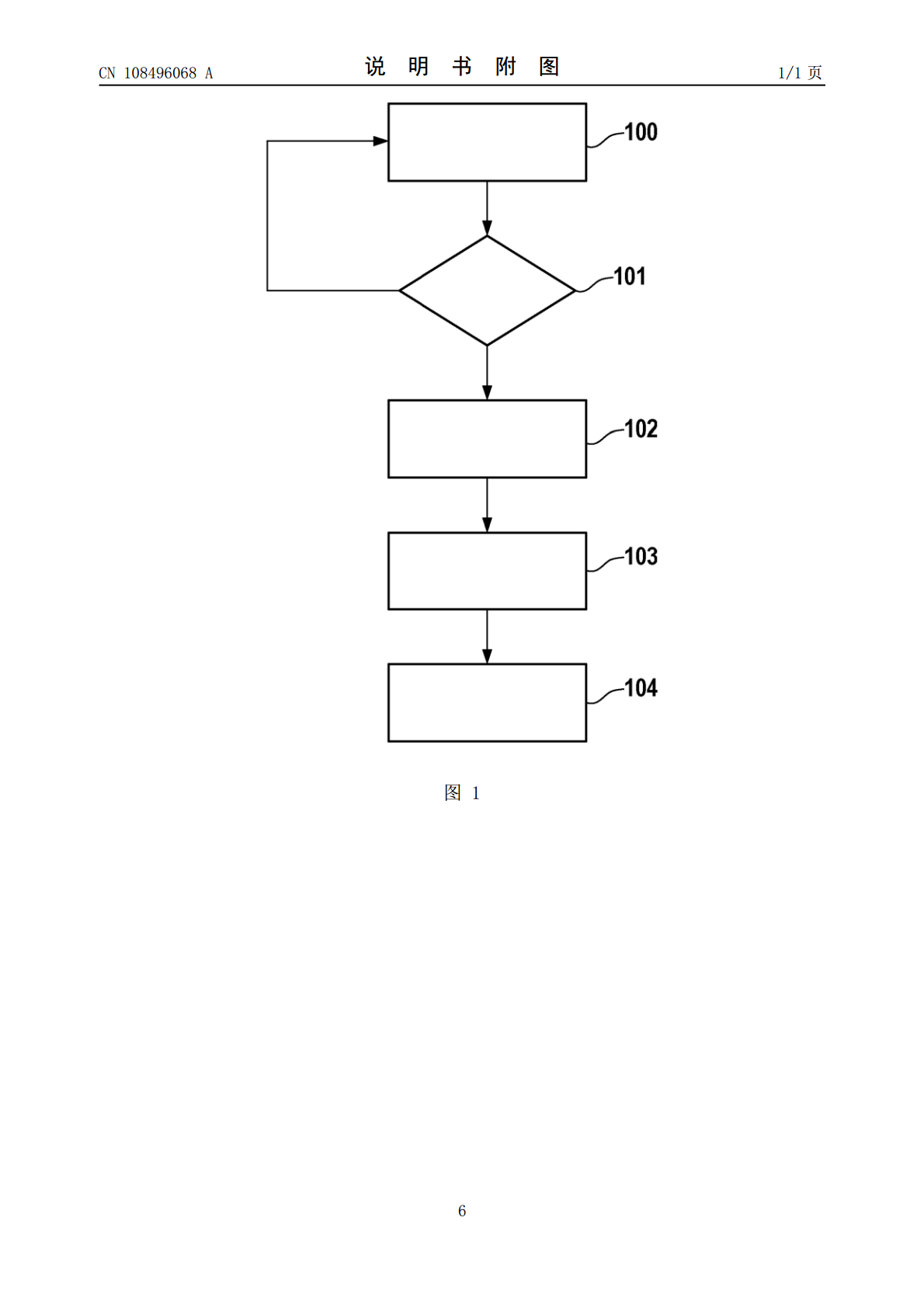
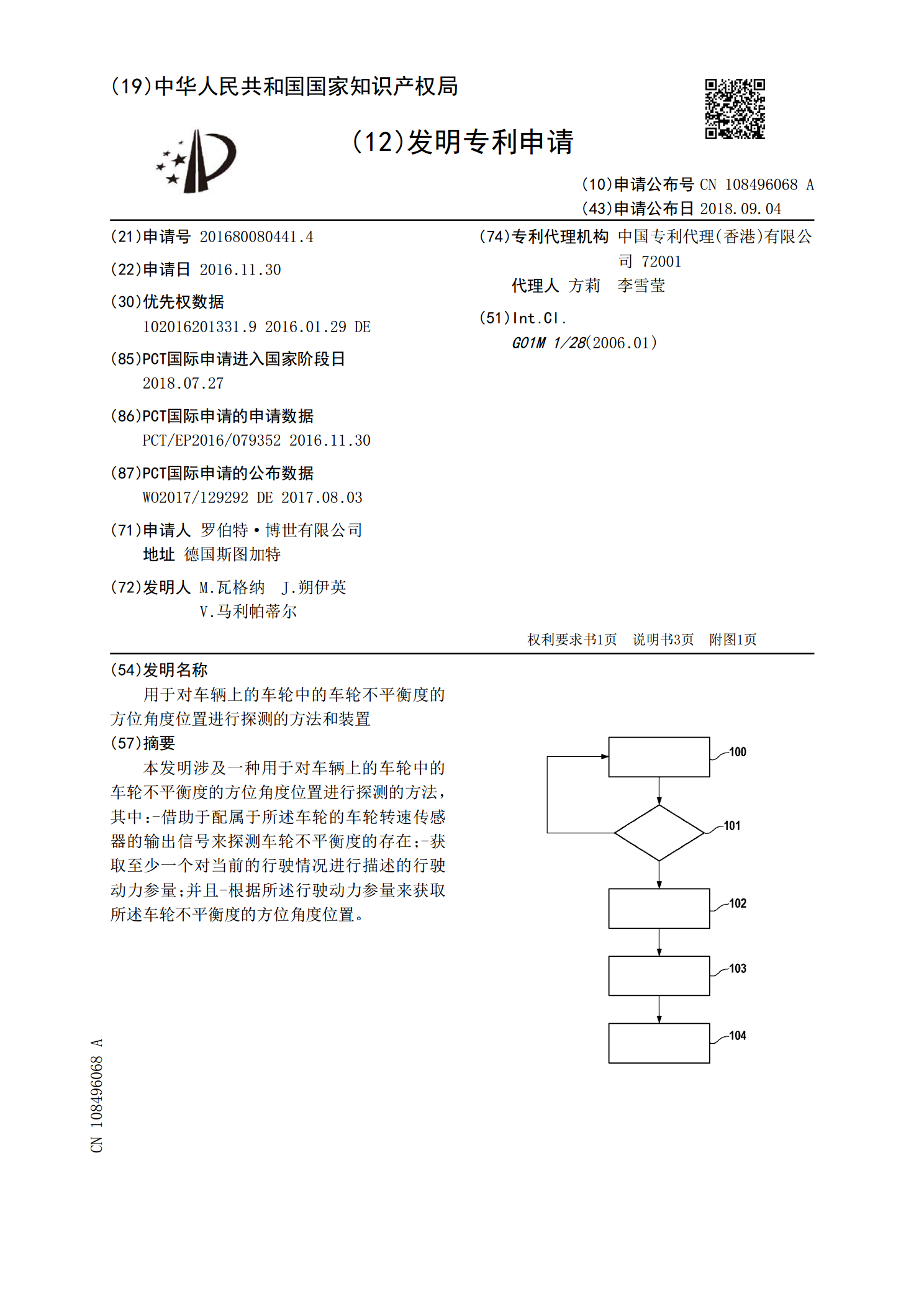
本发明涉及一种用于对车辆上的车轮中的车轮不平衡度的方位角度位置进行探测的方法,其中:‑借助于配属于所述车轮的车轮转速传感器的输出信号来探测车轮不平衡度的存在;‑获取至少一个对当前的行驶情况进行描述的行驶动力参量;并且‑根据所述行驶动力参量来获取所述车轮不平衡度的方位角度位置。
用于探测在车辆中的车轮不平衡的方法.pdf
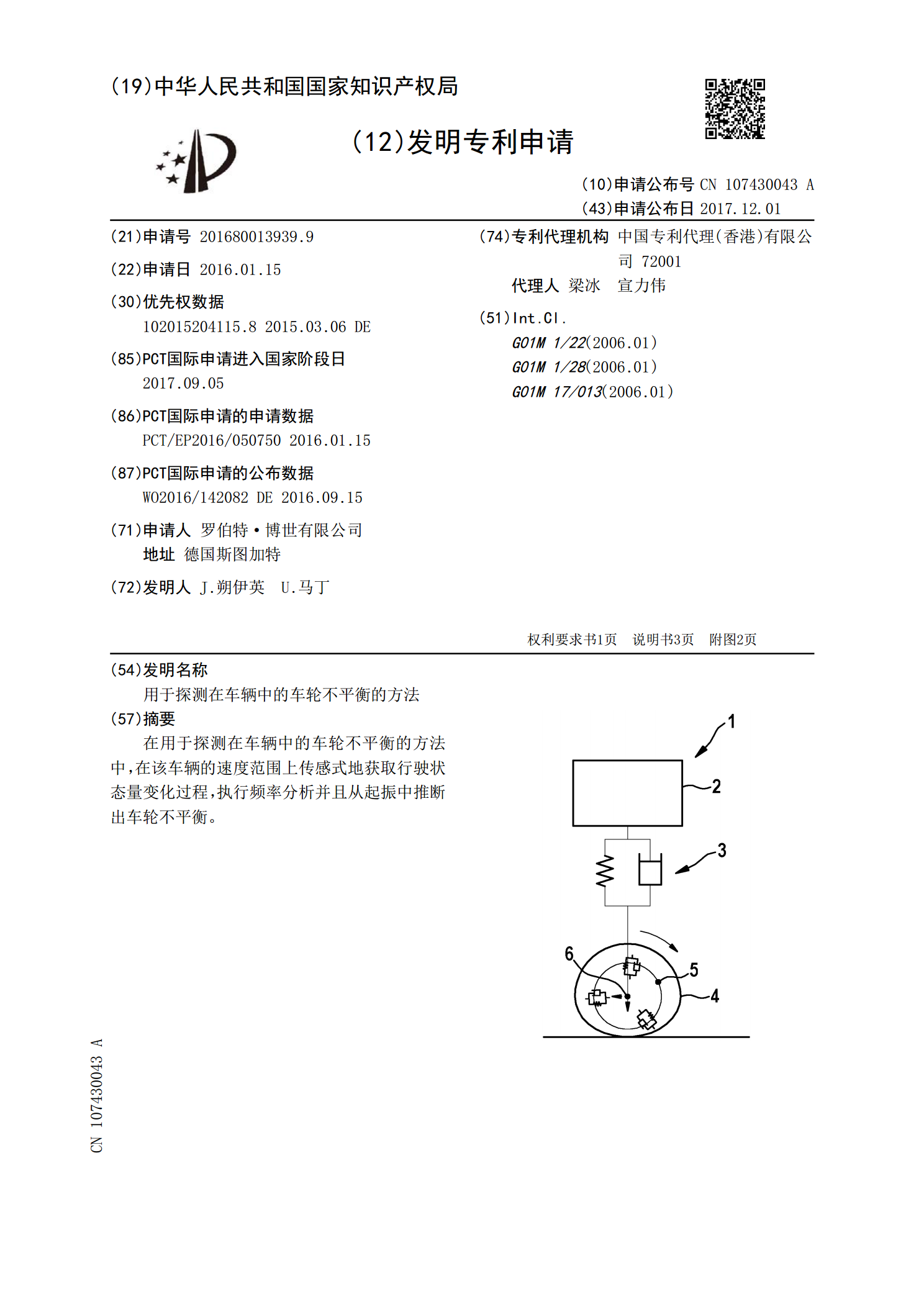
在用于探测在车辆中的车轮不平衡的方法中,在该车辆的速度范围上传感式地获取行驶状态量变化过程,执行频率分析并且从起振中推断出车轮不平衡。
用于定位车轮在车辆中的安装方位的方法和装置.pdf
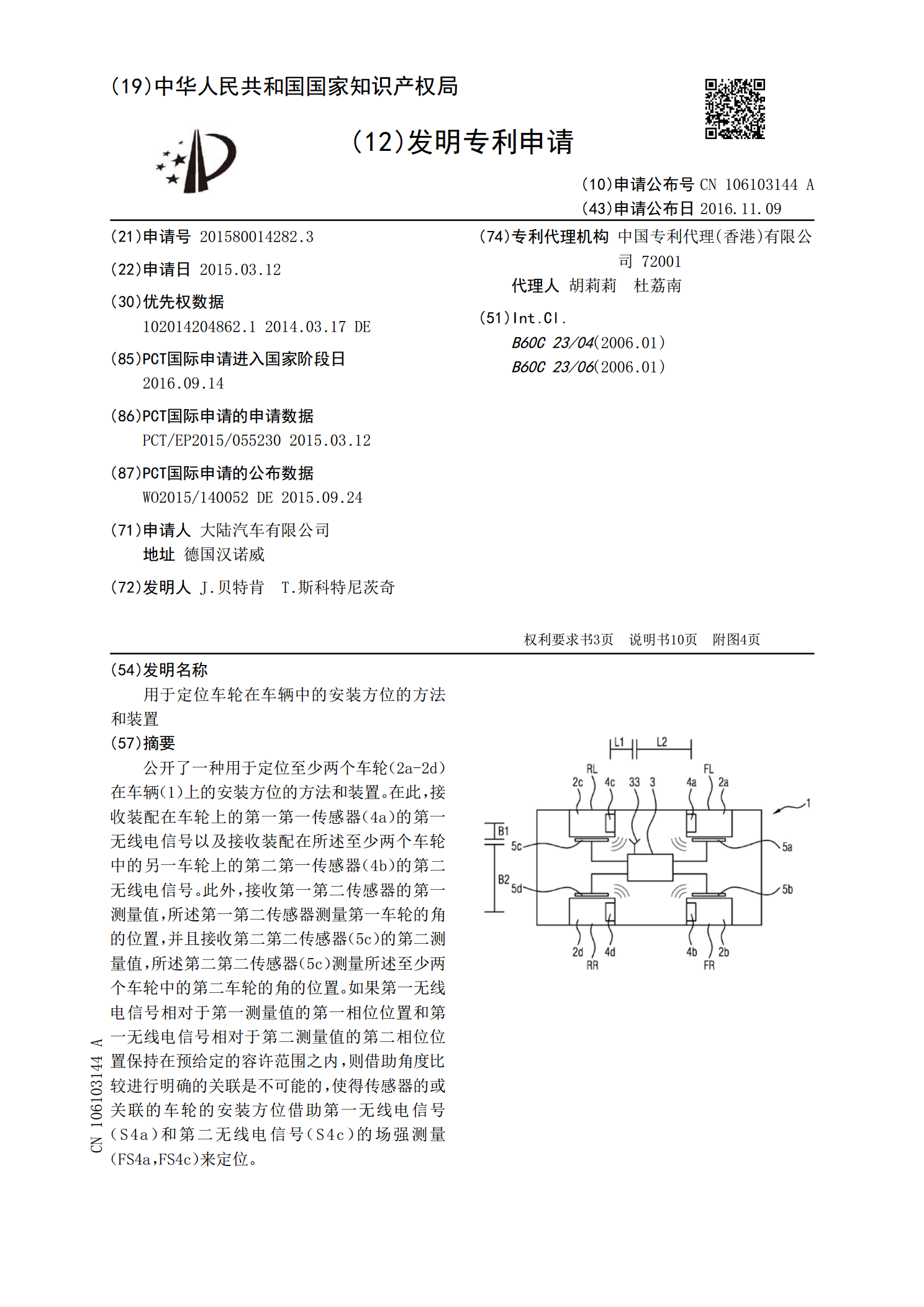
公开了一种用于定位至少两个车轮(2a‑2d)在车辆(1)上的安装方位的方法和装置。在此,接收装配在车轮上的第一第一传感器(4a)的第一无线电信号以及接收装配在所述至少两个车轮中的另一车轮上的第二第一传感器(4b)的第二无线电信号。此外,接收第一第二传感器的第一测量值,所述第一第二传感器测量第一车轮的角的位置,并且接收第二第二传感器(5c)的第二测量值,所述第二第二传感器(5c)测量所述至少两个车轮中的第二车轮的角的位置。如果第一无线电信号相对于第一测量值的第一相位位置和第一无线电信号相对于第二测量值的第二

用于补偿车轮不平衡度的方法和装置.pdf
在一种用于补偿具有轮辋和轮胎的车轮上的不平衡度的方法中,在不平衡度测量站中测量车轮的不平衡度,在不平衡度测量站中旋转车轮到规定的扭转角位置并且将规定的扭转角位置和补偿数据传输给用于控制补偿站的安装头的一个控制装置;借助于设置在操纵装置上的卡爪将车轮从不平衡度测量站输送到补偿站,并且该卡爪将车轮对中并夹持在补偿站中;在补偿站的安装头中插入一个单侧涂有粘结剂的平衡元件,该平衡元件具有在不平衡度测量站中确定的质量;并且车轮和/或安装头根据控制装置这样地转动,使得平衡元件在补偿面中到达轮辋的空腔中并且到达固定面上
车辆的车轮位置测定方法及车辆的车轮位置测定装置.pdf
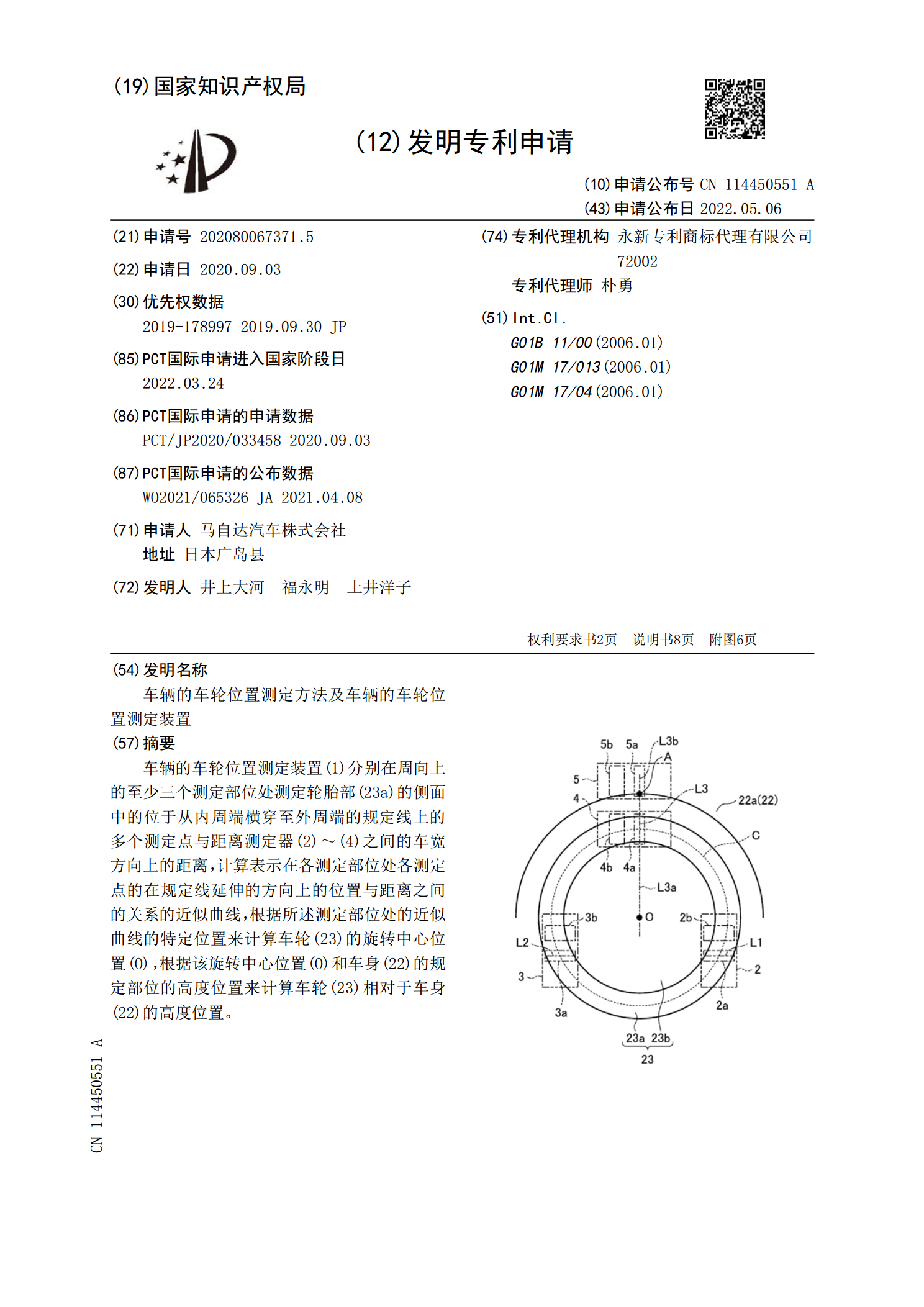
车辆的车轮位置测定装置(1)分别在周向上的至少三个测定部位处测定轮胎部(23a)的侧面中的位于从内周端横穿至外周端的规定线上的多个测定点与距离测定器(2)~(4)之间的车宽方向上的距离,计算表示在各测定部位处各测定点的在规定线延伸的方向上的位置与距离之间的关系的近似曲线,根据所述测定部位处的近似曲线的特定位置来计算车轮(23)的旋转中心位置(O),根据该旋转中心位置(O)和车身(22)的规定部位的高度位置来计算车轮(23)相对于车身(22)的高度位置。