
一种双轮平衡车驱动防滑系统的方法.pdf

斌斌****公主

1/8

2/8
3/8

4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双轮平衡车驱动防滑系统的方法.pdf
本发明提供一种双轮平衡车驱动防滑系统的方法,属于平衡车控制中的驱动防滑技术ASR。本发明是通过控制驱动轮的滑转率尽可能接近最佳滑转率S
一种电动双轮平衡车系统及电动双轮平衡车控制方法.pdf
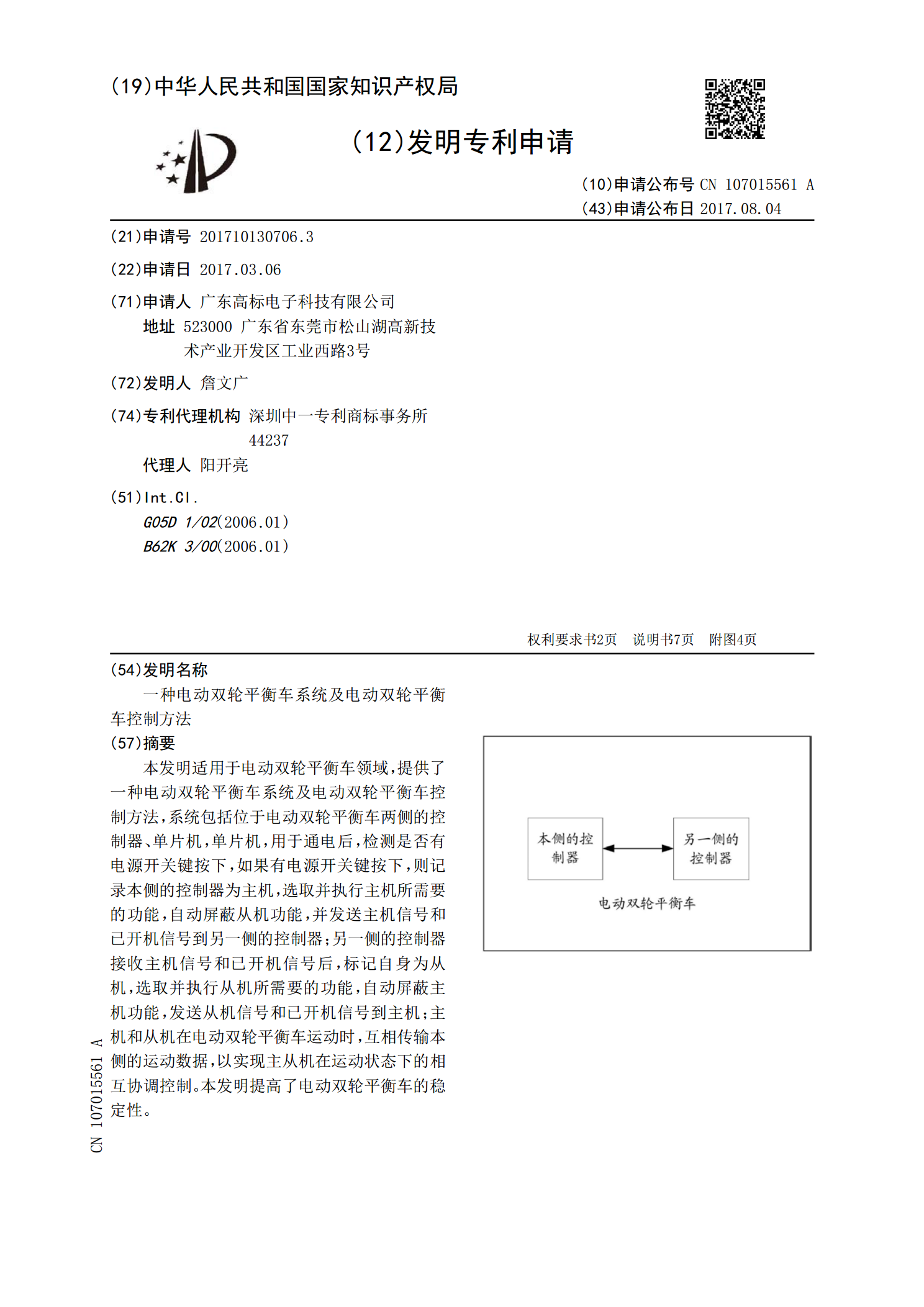
本发明适用于电动双轮平衡车领域,提供了一种电动双轮平衡车系统及电动双轮平衡车控制方法,系统包括位于电动双轮平衡车两侧的控制器、单片机,单片机,用于通电后,检测是否有电源开关键按下,如果有电源开关键按下,则记录本侧的控制器为主机,选取并执行主机所需要的功能,自动屏蔽从机功能,并发送主机信号和已开机信号到另一侧的控制器;另一侧的控制器接收主机信号和已开机信号后,标记自身为从机,选取并执行从机所需要的功能,自动屏蔽主机功能,发送从机信号和已开机信号到主机;主机和从机在电动双轮平衡车运动时,互相传输本侧的运动数据

一种双轮平衡车控制系统.pdf
一种双轮平衡车控制系统,其技术要点是:包括微控制器、电源、传感器、加速度计、电机和上位机,所述加速度计和传感器分别与微控制器相连,所述微控制器通过电机驱动模块连接直流电机,微控制器通过通讯模块与上位机相连,传感器和微控制器分别与电源相连。本发明以内置的精密固态陀螺仪来判断车身所处的姿势状态,通过精密且高速的中央微处理器计算出适当的指令后,驱动电机来做到平衡的效果。具体是将自动平衡车的两轮足进行平行布置,利用加速度计与陀螺仪进行前后倾斜角度和角速度的检测,进行自平衡车转向控制杆左右倾斜角度的检测,并将信息输
一种双轮自平衡车及其方法.pdf
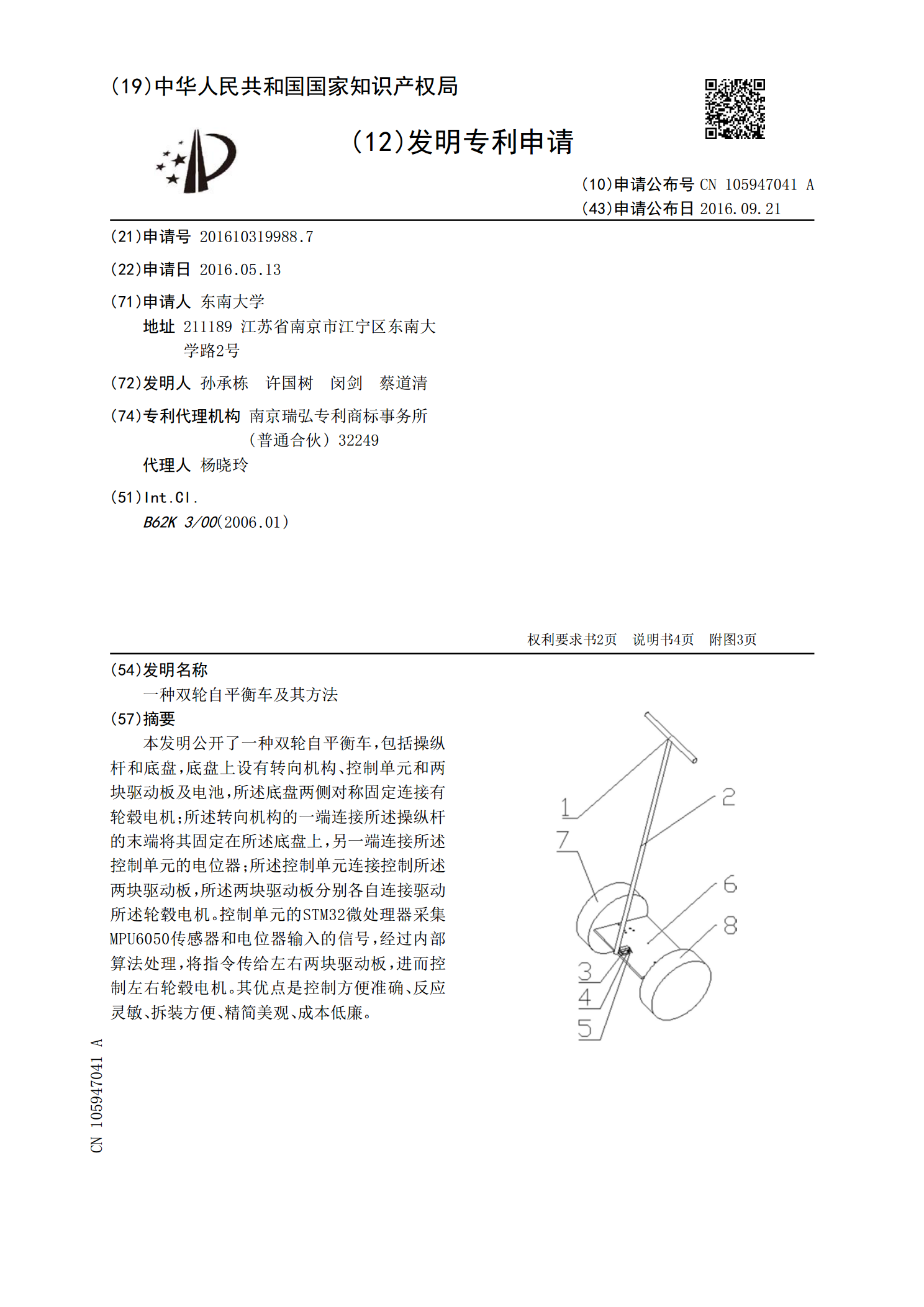
本发明公开了一种双轮自平衡车,包括操纵杆和底盘,底盘上设有转向机构、控制单元和两块驱动板及电池,所述底盘两侧对称固定连接有轮毂电机;所述转向机构的一端连接所述操纵杆的末端将其固定在所述底盘上,另一端连接所述控制单元的电位器;所述控制单元连接控制所述两块驱动板,所述两块驱动板分别各自连接驱动所述轮毂电机。控制单元的STM32微处理器采集MPU6050传感器和电位器输入的信号,经过内部算法处理,将指令传给左右两块驱动板,进而控制左右轮毂电机。其优点是控制方便准确、反应灵敏、拆装方便、精简美观、成本低廉。

一种双轮平衡车的自动跟随方法.pdf
为了解决现有技术中双轮平衡车跟随技术成本高的问题,本发明提出了一种双轮平衡车的自动跟随方法,包括MCU模块、设置在双轮平衡车上的信号接收组件以及设置在手持智能端上的信号发射组件,其特征在于,手持智能端上的信号发射组件通过固定频率向信号接收组件发送信号,MCU模块根据信号接收组件接收信号的先后顺序,确定双轮平衡车距离手持智能端的距离,从而通过MCU模块发送控制指令驱动双轮平衡车跟随手持智能端移动。本发明利用超声波传感器与无线电传感器实现将双轮自主平衡车与对车主实时跟随有效的进行结合,使原本就十分的吸引人的双