
一种双轮平衡车控制系统.pdf

慧颖****23

1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双轮平衡车控制系统.pdf
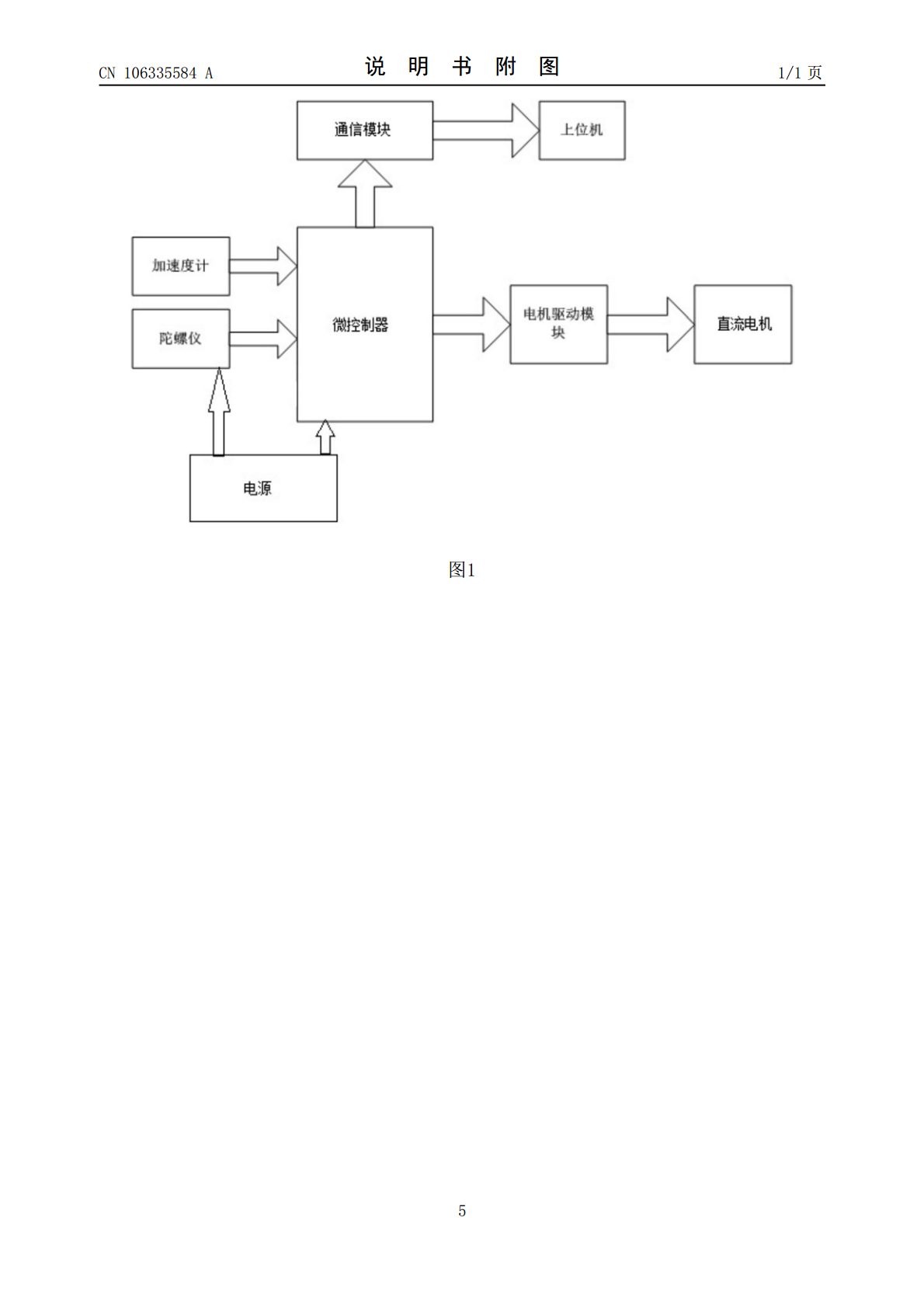
一种双轮平衡车控制系统,其技术要点是:包括微控制器、电源、传感器、加速度计、电机和上位机,所述加速度计和传感器分别与微控制器相连,所述微控制器通过电机驱动模块连接直流电机,微控制器通过通讯模块与上位机相连,传感器和微控制器分别与电源相连。本发明以内置的精密固态陀螺仪来判断车身所处的姿势状态,通过精密且高速的中央微处理器计算出适当的指令后,驱动电机来做到平衡的效果。具体是将自动平衡车的两轮足进行平行布置,利用加速度计与陀螺仪进行前后倾斜角度和角速度的检测,进行自平衡车转向控制杆左右倾斜角度的检测,并将信息输
双轮平衡车的控制系统.pdf
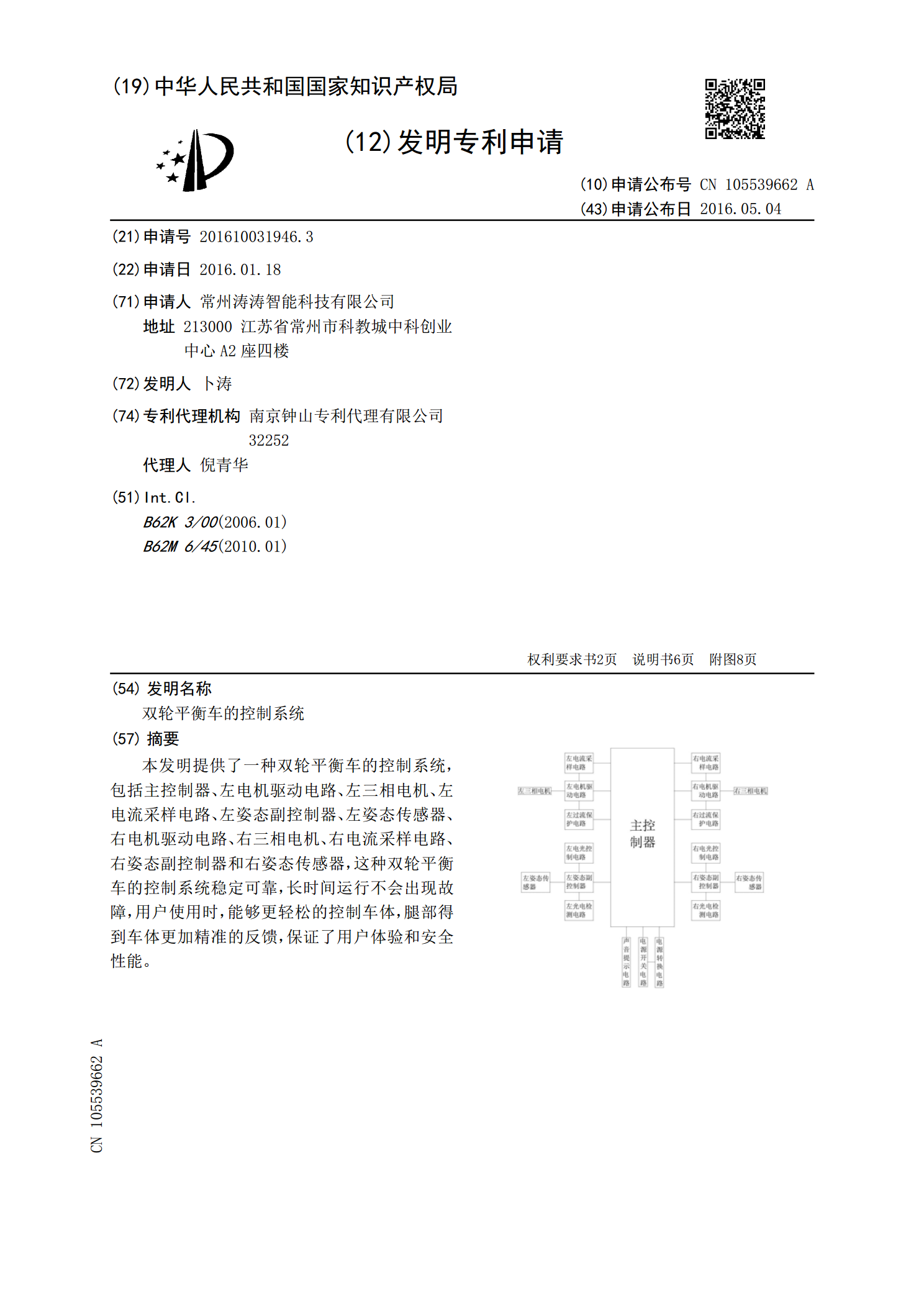
本发明提供了一种双轮平衡车的控制系统,包括主控制器、左电机驱动电路、左三相电机、左电流采样电路、左姿态副控制器、左姿态传感器、右电机驱动电路、右三相电机、右电流采样电路、右姿态副控制器和右姿态传感器,这种双轮平衡车的控制系统稳定可靠,长时间运行不会出现故障,用户使用时,能够更轻松的控制车体,腿部得到车体更加精准的反馈,保证了用户体验和安全性能。

双轮平衡车控制系统的设计.pdf
一种电动双轮平衡车系统及电动双轮平衡车控制方法.pdf
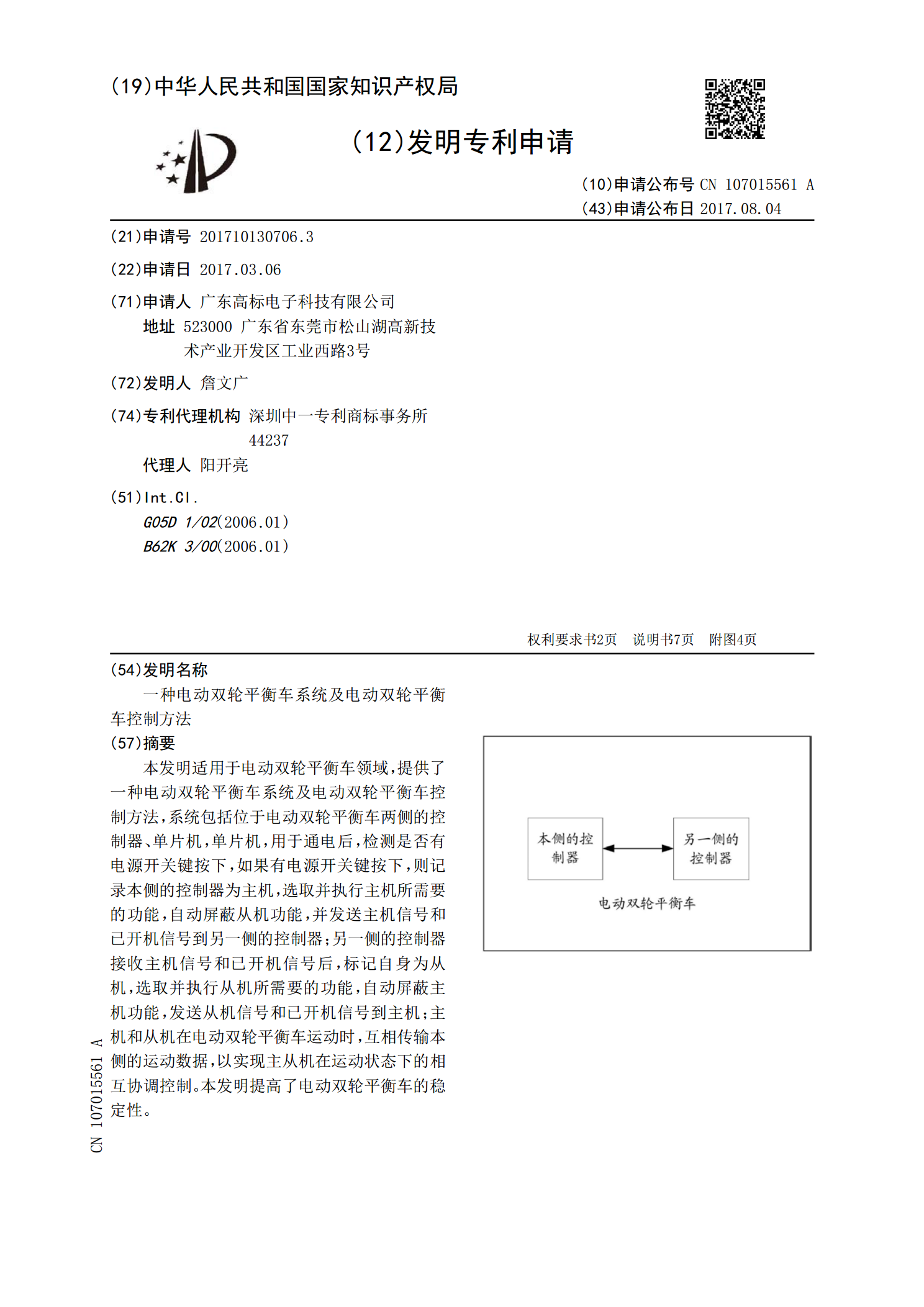
本发明适用于电动双轮平衡车领域,提供了一种电动双轮平衡车系统及电动双轮平衡车控制方法,系统包括位于电动双轮平衡车两侧的控制器、单片机,单片机,用于通电后,检测是否有电源开关键按下,如果有电源开关键按下,则记录本侧的控制器为主机,选取并执行主机所需要的功能,自动屏蔽从机功能,并发送主机信号和已开机信号到另一侧的控制器;另一侧的控制器接收主机信号和已开机信号后,标记自身为从机,选取并执行从机所需要的功能,自动屏蔽主机功能,发送从机信号和已开机信号到主机;主机和从机在电动双轮平衡车运动时,互相传输本侧的运动数据
一种双轮平衡车.pdf
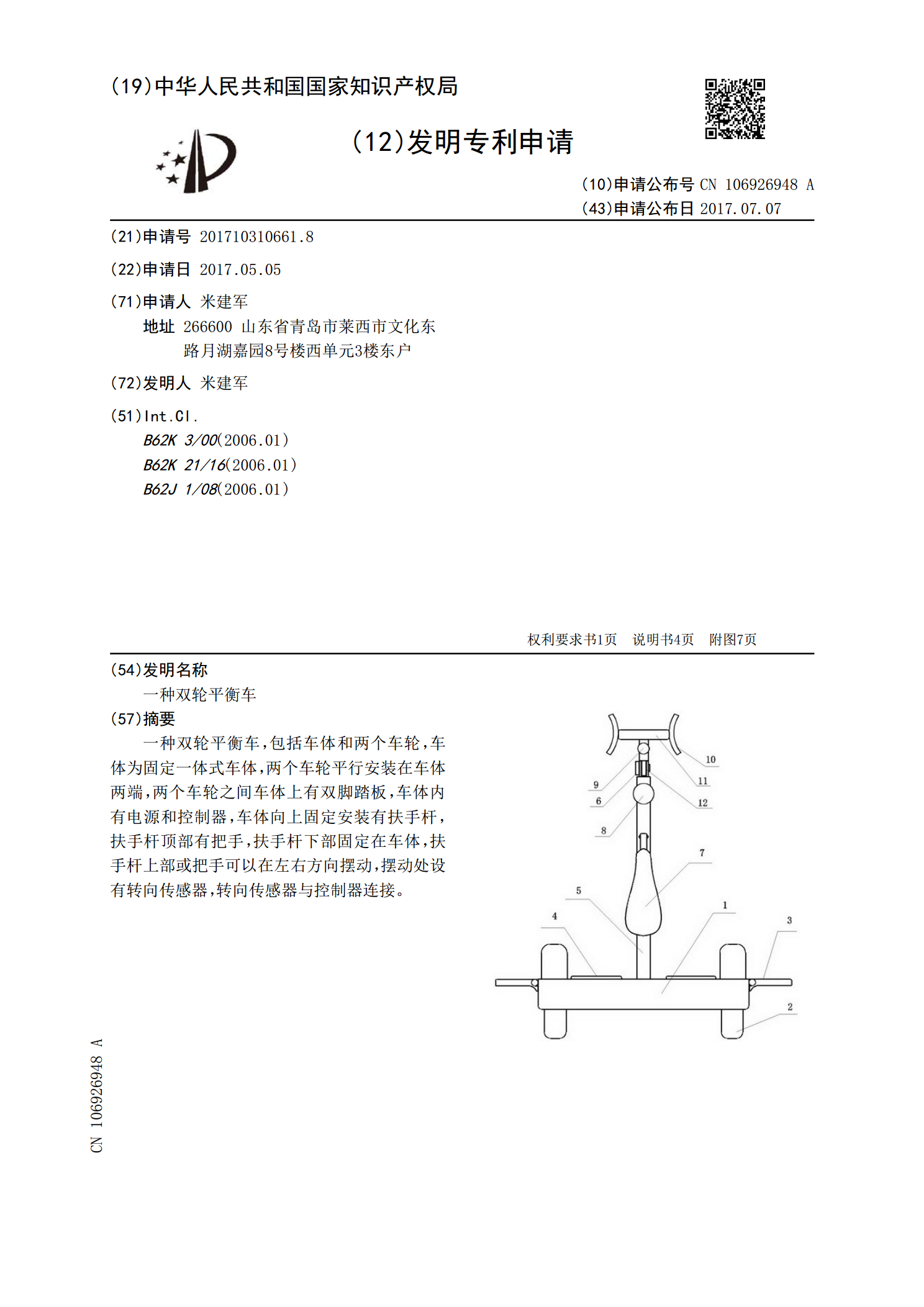
一种双轮平衡车,包括车体和两个车轮,车体为固定一体式车体,两个车轮平行安装在车体两端,两个车轮之间车体上有双脚踏板,车体内有电源和控制器,车体向上固定安装有扶手杆,扶手杆顶部有把手,扶手杆下部固定在车体,扶手杆上部或把手可以在左右方向摆动,摆动处设有转向传感器,转向传感器与控制器连接。