
一种双轮平衡车的自动跟随方法.pdf

光誉****君哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双轮平衡车的自动跟随方法.pdf
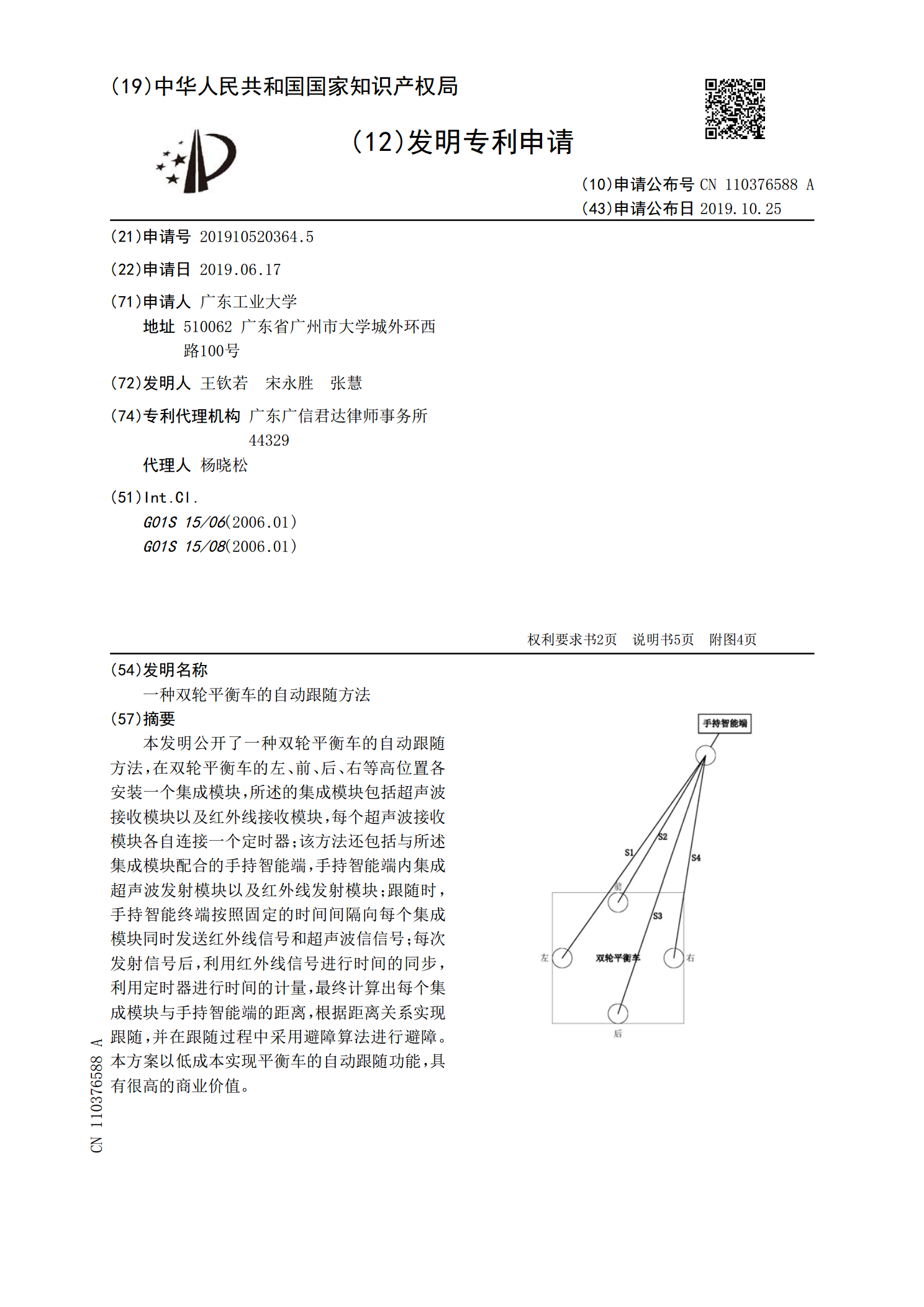
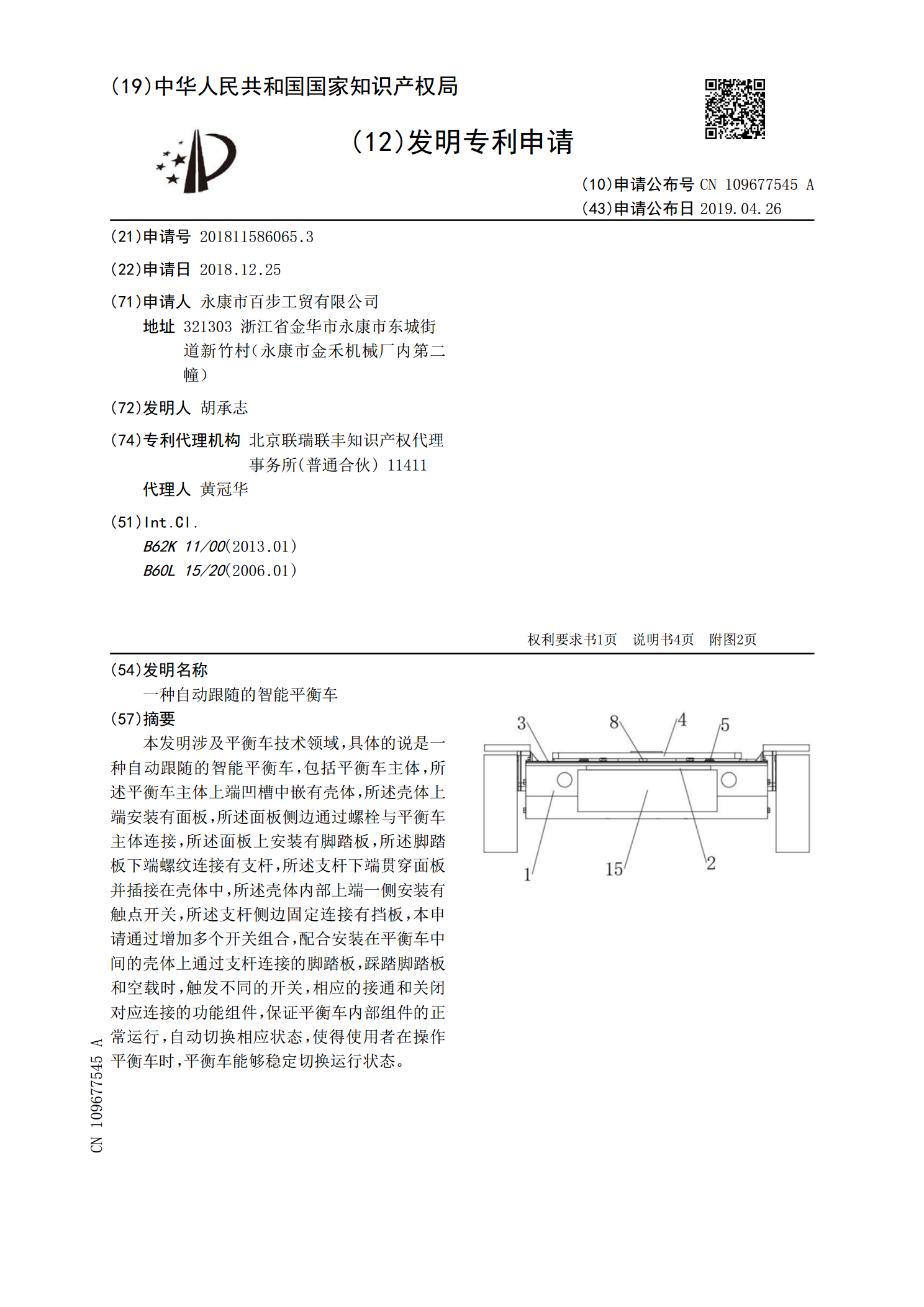
为了解决现有技术中双轮平衡车跟随技术成本高的问题,本发明提出了一种双轮平衡车的自动跟随方法,包括MCU模块、设置在双轮平衡车上的信号接收组件以及设置在手持智能端上的信号发射组件,其特征在于,手持智能端上的信号发射组件通过固定频率向信号接收组件发送信号,MCU模块根据信号接收组件接收信号的先后顺序,确定双轮平衡车距离手持智能端的距离,从而通过MCU模块发送控制指令驱动双轮平衡车跟随手持智能端移动。本发明利用超声波传感器与无线电传感器实现将双轮自主平衡车与对车主实时跟随有效的进行结合,使原本就十分的吸引人的双
一种双轮平衡车的自动跟随方法.pdf
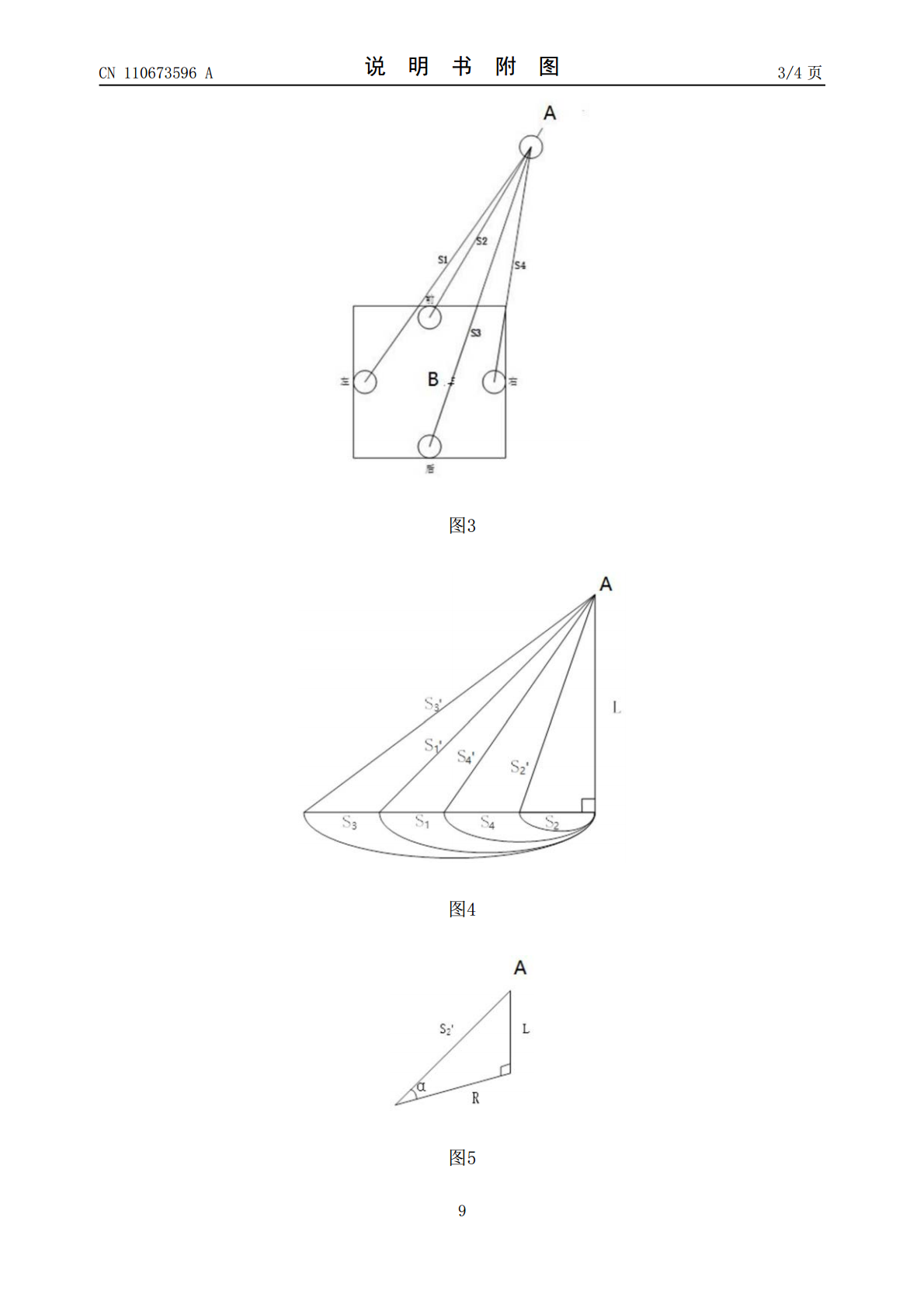
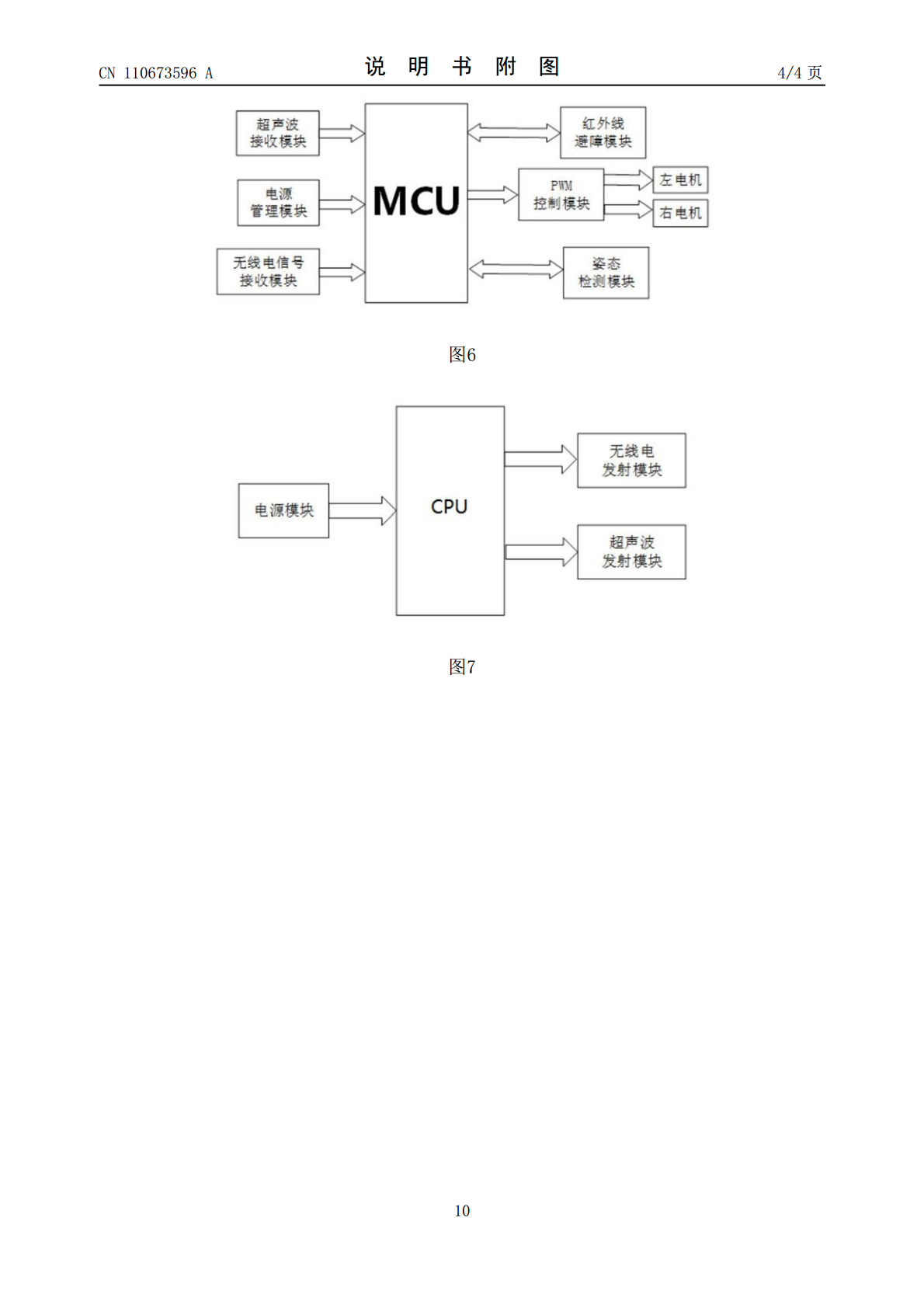
本发明公开了一种双轮平衡车的自动跟随方法,在双轮平衡车的左、前、后、右等高位置各安装一个集成模块,所述的集成模块包括超声波接收模块以及红外线接收模块,每个超声波接收模块各自连接一个定时器;该方法还包括与所述集成模块配合的手持智能端,手持智能端内集成超声波发射模块以及红外线发射模块;跟随时,手持智能终端按照固定的时间间隔向每个集成模块同时发送红外线信号和超声波信信号;每次发射信号后,利用红外线信号进行时间的同步,利用定时器进行时间的计量,最终计算出每个集成模块与手持智能端的距离,根据距离关系实现跟随,并在跟
一种自动跟随的智能平衡车.pdf
本发明涉及平衡车技术领域,具体的说是一种自动跟随的智能平衡车,包括平衡车主体,所述平衡车主体上端凹槽中嵌有壳体,所述壳体上端安装有面板,所述面板侧边通过螺栓与平衡车主体连接,所述面板上安装有脚踏板,所述脚踏板下端螺纹连接有支杆,所述支杆下端贯穿面板并插接在壳体中,所述壳体内部上端一侧安装有触点开关,所述支杆侧边固定连接有挡板,本申请通过增加多个开关组合,配合安装在平衡车中间的壳体上通过支杆连接的脚踏板,踩踏脚踏板和空载时,触发不同的开关,相应的接通和关闭对应连接的功能组件,保证平衡车内部组件的正常运行,自
一种电动双轮平衡车系统及电动双轮平衡车控制方法.pdf
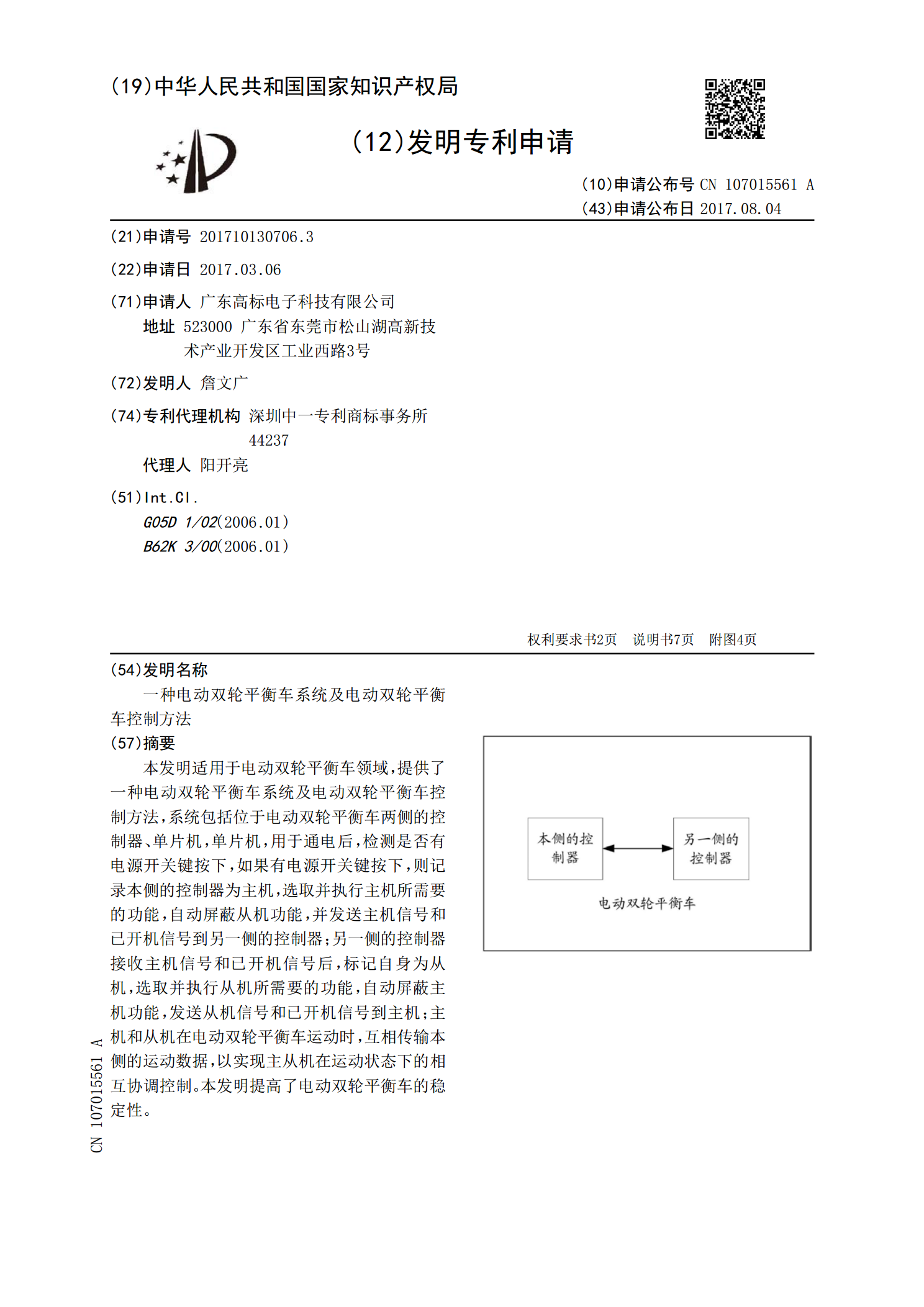
本发明适用于电动双轮平衡车领域,提供了一种电动双轮平衡车系统及电动双轮平衡车控制方法,系统包括位于电动双轮平衡车两侧的控制器、单片机,单片机,用于通电后,检测是否有电源开关键按下,如果有电源开关键按下,则记录本侧的控制器为主机,选取并执行主机所需要的功能,自动屏蔽从机功能,并发送主机信号和已开机信号到另一侧的控制器;另一侧的控制器接收主机信号和已开机信号后,标记自身为从机,选取并执行从机所需要的功能,自动屏蔽主机功能,发送从机信号和已开机信号到主机;主机和从机在电动双轮平衡车运动时,互相传输本侧的运动数据
一种双轮自平衡车及其方法.pdf
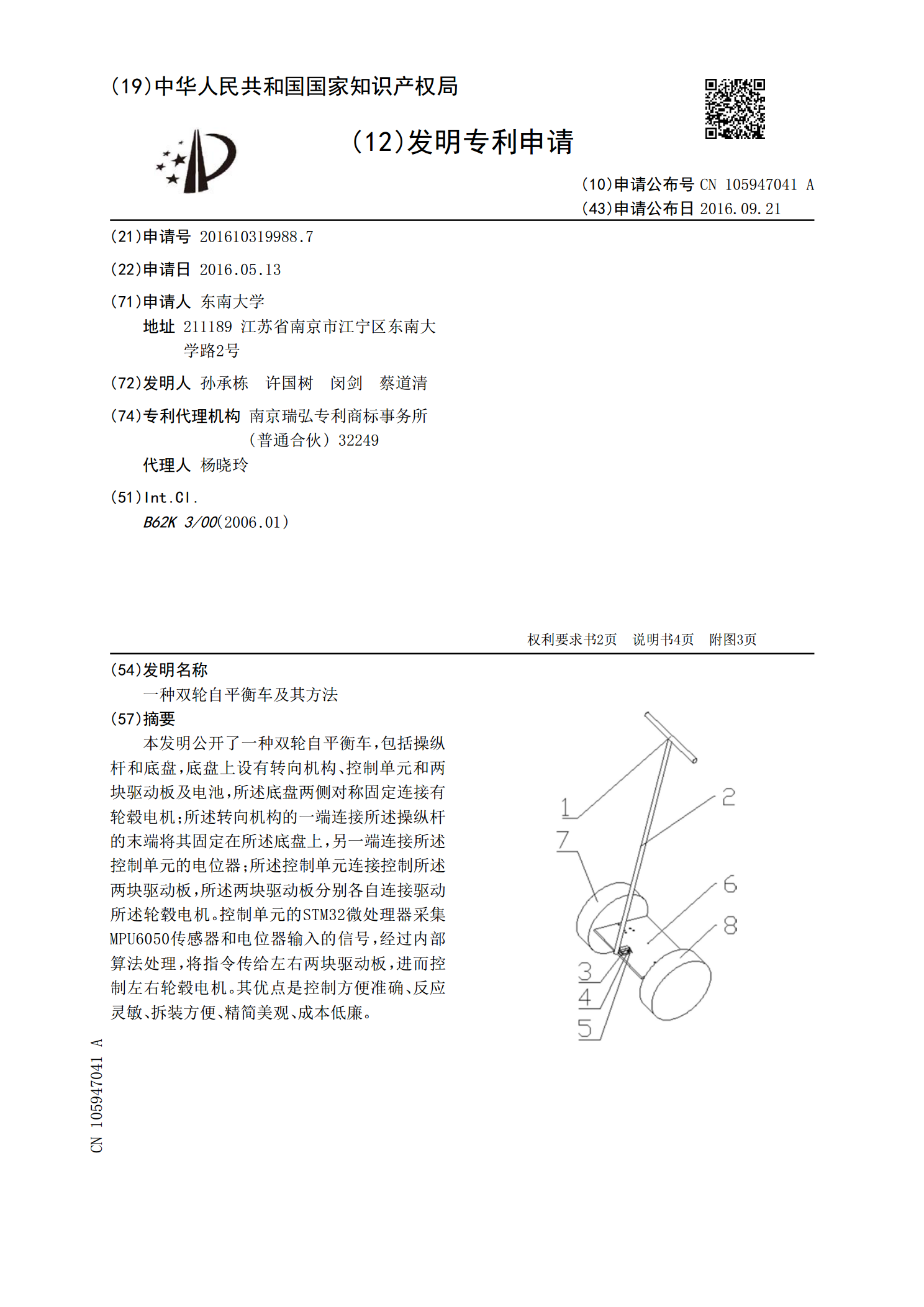
本发明公开了一种双轮自平衡车,包括操纵杆和底盘,底盘上设有转向机构、控制单元和两块驱动板及电池,所述底盘两侧对称固定连接有轮毂电机;所述转向机构的一端连接所述操纵杆的末端将其固定在所述底盘上,另一端连接所述控制单元的电位器;所述控制单元连接控制所述两块驱动板,所述两块驱动板分别各自连接驱动所述轮毂电机。控制单元的STM32微处理器采集MPU6050传感器和电位器输入的信号,经过内部算法处理,将指令传给左右两块驱动板,进而控制左右轮毂电机。其优点是控制方便准确、反应灵敏、拆装方便、精简美观、成本低廉。