
一种电动双轮平衡车系统及电动双轮平衡车控制方法.pdf

一吃****永贺

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动双轮平衡车系统及电动双轮平衡车控制方法.pdf
本发明适用于电动双轮平衡车领域,提供了一种电动双轮平衡车系统及电动双轮平衡车控制方法,系统包括位于电动双轮平衡车两侧的控制器、单片机,单片机,用于通电后,检测是否有电源开关键按下,如果有电源开关键按下,则记录本侧的控制器为主机,选取并执行主机所需要的功能,自动屏蔽从机功能,并发送主机信号和已开机信号到另一侧的控制器;另一侧的控制器接收主机信号和已开机信号后,标记自身为从机,选取并执行从机所需要的功能,自动屏蔽主机功能,发送从机信号和已开机信号到主机;主机和从机在电动双轮平衡车运动时,互相传输本侧的运动数据

双轮电动平衡车.pdf
本发明公开了一种双轮电动平衡车,包括:控制模组、左轮模组、右轮模组、前壳模组、后壳模组、踏板模组、电池模组、底壳模组、霍尔控制模组、把手杆、显示屏模组,控制模组中的中央处理模块分别与通讯模块、监控模块、I/O模块、运营数据管理模块、下载模块、电源模块连接,监控模块连接摄像模块及行车记录模块,运营数据管理模块连接压力传感模块、监测模块、健康数据管理模块,I/O模块连接多模定位模块及音响,通讯模块连接有WIFI模块、3G模块及蓝牙,且3G模块连接云端/服务器。本发明是一种具有行车记录、定位功能、提高安全性能、

双轮电动平衡扭扭车.pdf
本发明涉及一种电动平衡车,尤其是一种设计更合理、操控更灵活的双轮电动平衡扭扭车。一种双轮电动平衡扭扭车,包括上盖、中间支撑框架和下盖,所述上盖上设有对称分布的两个空槽,空槽内设有踏板,所述踏板由橡胶脚踏皮和脚踏板塑件连接而成,外面磨损后,只要更换踏皮,所述橡胶脚踏皮上表面具有均匀分布的拱形凸起,不容易磨损,阻尼效果好,所述中间支撑框架的中段内安装有主轴,主轴上套有左、右套管,左、右套管之间设有铜圈,固定铜圈后,左、右套管的安装不会存在偏差,故不会影响车体的转动效果,左、右套管通过卡簧固定在中间支撑框架上;
一种双轮电动平衡车.pdf
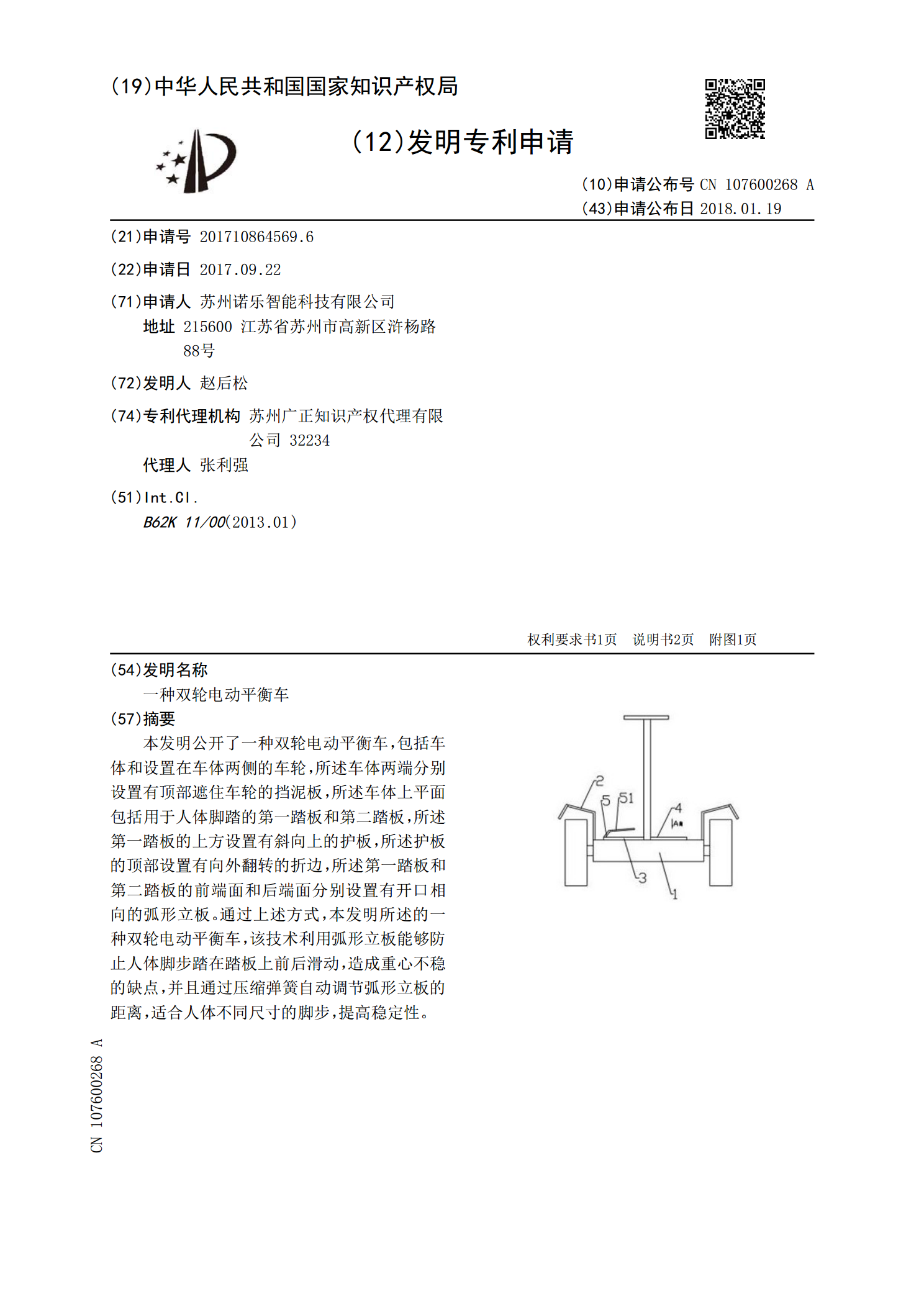
本发明公开了一种双轮电动平衡车,包括车体和设置在车体两侧的车轮,所述车体两端分别设置有顶部遮住车轮的挡泥板,所述车体上平面包括用于人体脚踏的第一踏板和第二踏板,所述第一踏板的上方设置有斜向上的护板,所述护板的顶部设置有向外翻转的折边,所述第一踏板和第二踏板的前端面和后端面分别设置有开口相向的弧形立板。通过上述方式,本发明所述的一种双轮电动平衡车,该技术利用弧形立板能够防止人体脚步踏在踏板上前后滑动,造成重心不稳的缺点,并且通过压缩弹簧自动调节弧形立板的距离,适合人体不同尺寸的脚步,提高稳定性。

一种自平衡电动双轮车.pdf
本发明公开了一种自平衡电动双轮车,包括有两个车轮,车轮内周为力矩电机,力矩电机的内定子一侧固定连接在一个安装座上,安装座上远离车轮的一侧连接有踏板,安装座上位于踏板下方转动连接有连接座,两个所述的连接座之间通过一个联动座连接,且联动座两端与两个连接座均铰接;所述联动座一端与其中一个连接座之间在铰接位置安装有一个角度传感器,角度传感器与所述控制器的信号输入端连接;控制器根据角度传感器测得的角度相应对车轮的行驶速度进行限制,角度传感器检测到联动座与车轮表面的夹角减小,所述的设定速度增大。该双轮车使用方便,且利