
有轨智能运输小车.pdf

猫巷****傲柏

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
有轨智能运输小车.pdf
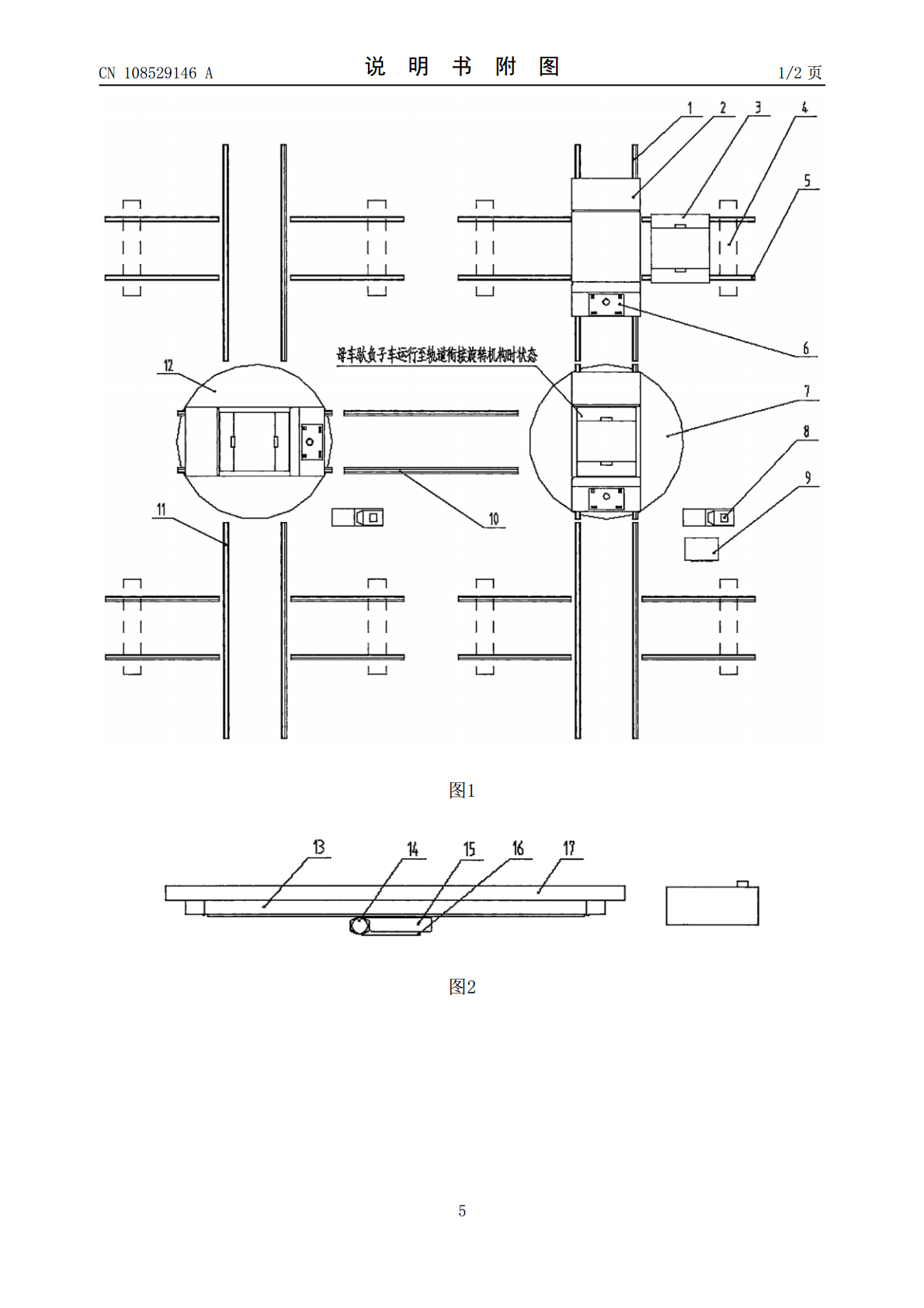
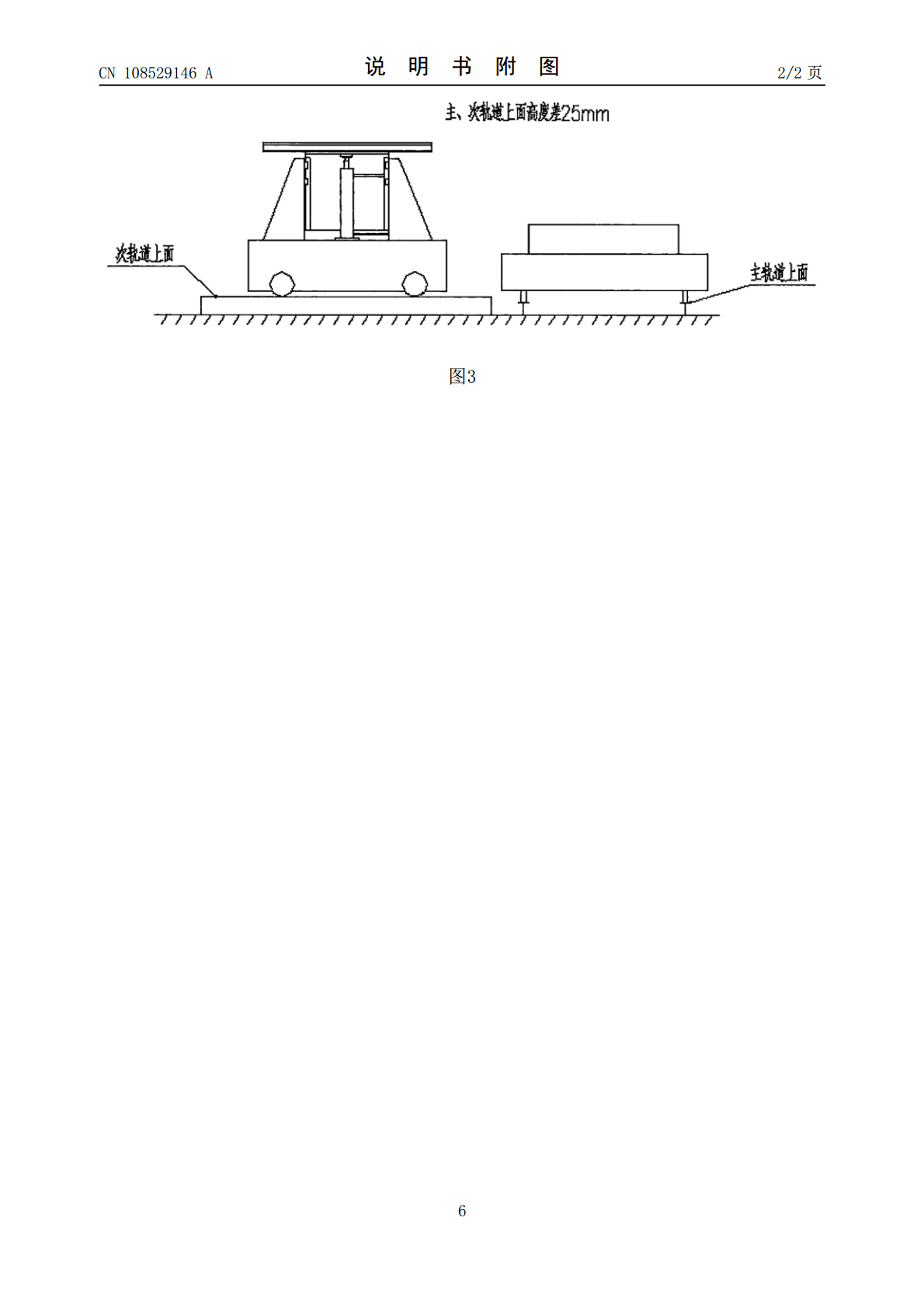
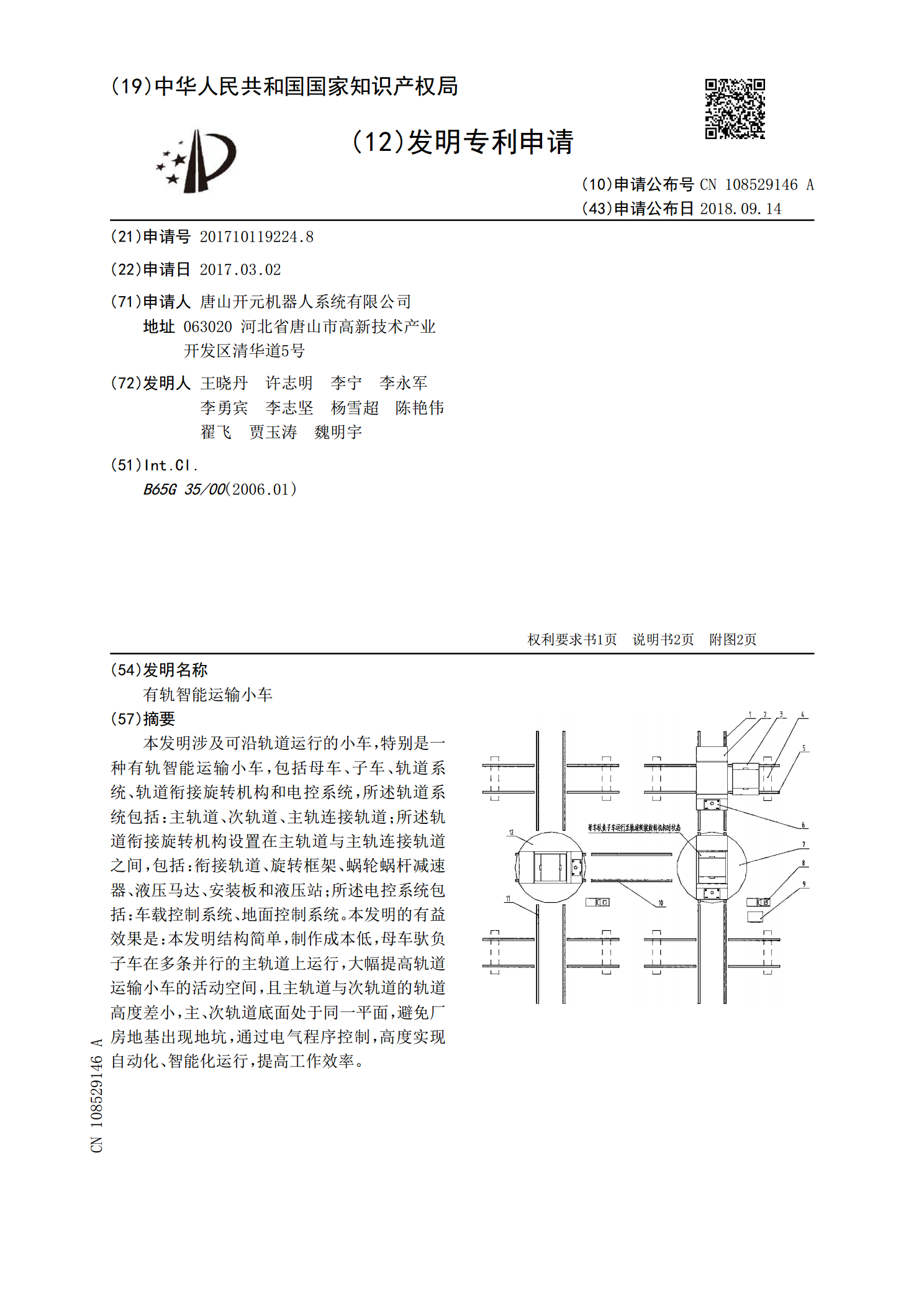
本发明涉及可沿轨道运行的小车,特别是一种有轨智能运输小车,包括母车、子车、轨道系统、轨道衔接旋转机构和电控系统,所述轨道系统包括:主轨道、次轨道、主轨连接轨道;所述轨道衔接旋转机构设置在主轨道与主轨连接轨道之间,包括:衔接轨道、旋转框架、蜗轮蜗杆减速器、液压马达、安装板和液压站;所述电控系统包括:车载控制系统、地面控制系统。本发明的有益效果是:本发明结构简单,制作成本低,母车驮负子车在多条并行的主轨道上运行,大幅提高轨道运输小车的活动空间,且主轨道与次轨道的轨道高度差小,主、次轨道底面处于同一平面,避免厂

数控有轨小车平台.pdf
本发明数控有轨小车平台,由车架、面板、前轮轴、前轮前齿轮和前光轴槽轮、后轮座、后轮后齿轮和后光轴槽轮、移机着地轮、带直齿条轨道和光轴的工字钢轨道、小车防倒钩、限位零位接近开关、减速机、数控电机等组成。前轮轴安装在车架前部位,两侧分别装配前齿轮和前光轴槽轮,中间装配从动齿轮,与数控电机减速机的主动齿轮啮合。后轮座安装在车架后部两侧,分别装配后齿轮和后光轴槽轮。移机着地轮安装在车架两侧,需移机时,调节连杆降,着地轮使小车前后轮脱离轨道移动。小车防倒钩装配在减速机座上,意外倾斜时可与工字钢轨道钩住,防止小车侧翻
有轨输送小车.pdf
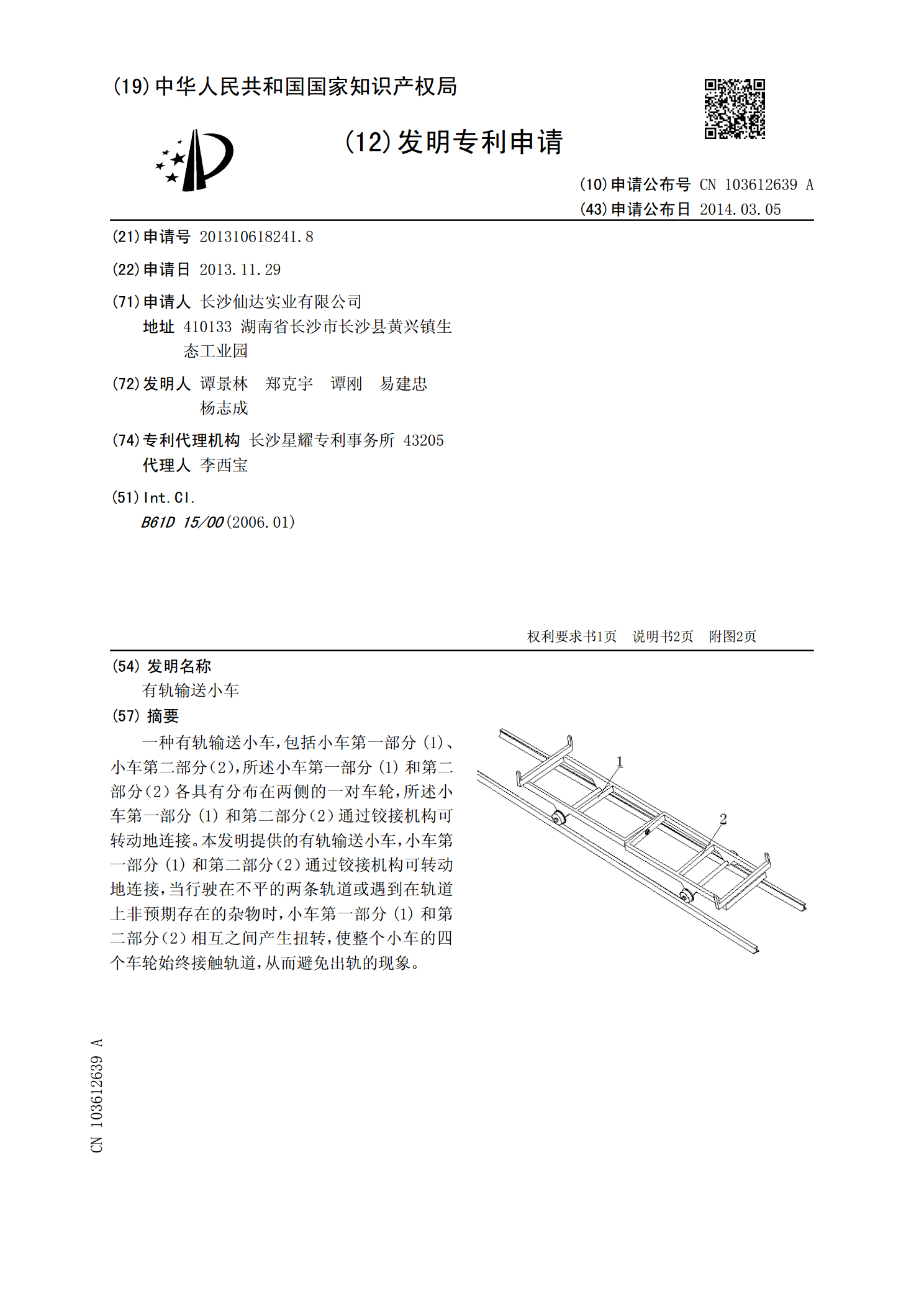
一种有轨输送小车,包括小车第一部分(1)、小车第二部分(2),所述小车第一部分(1)和第二部分(2)各具有分布在两侧的一对车轮,所述小车第一部分(1)和第二部分(2)通过铰接机构可转动地连接。本发明提供的有轨输送小车,小车第一部分(1)和第二部分(2)通过铰接机构可转动地连接,当行驶在不平的两条轨道或遇到在轨道上非预期存在的杂物时,小车第一部分(1)和第二部分(2)相互之间产生扭转,使整个小车的四个车轮始终接触轨道,从而避免出轨的现象。

重型有轨自由穿梭小车.pdf
本发明公开一种重型有轨自由穿梭小车,包括主轨、支轨、主线齿条、支线齿条、活动齿条、行走驱动机构、换向提升机构、转接驱动机构、主线车架、支线车架、主线行走轮、支线行走轮和驱动齿轮;主、支轨垂直交叉设置,主、支线齿条分别安装在主、支轨的轨道座上,主、支轨的交叉节点处安装活动齿条和转接驱动机构,活动齿条由转接驱动机构驱动与主或支线齿条对接;主、支线车架叠置在一起构成小车,下方分别安装主、支线行走轮,主、支线车架之间安装换向提升机构做相对升降,使主线行走轮与主轨配合或支线行走轮与支轨配合,行走驱动机构安装在小车上
一种智能运输产线的运输小车.pdf
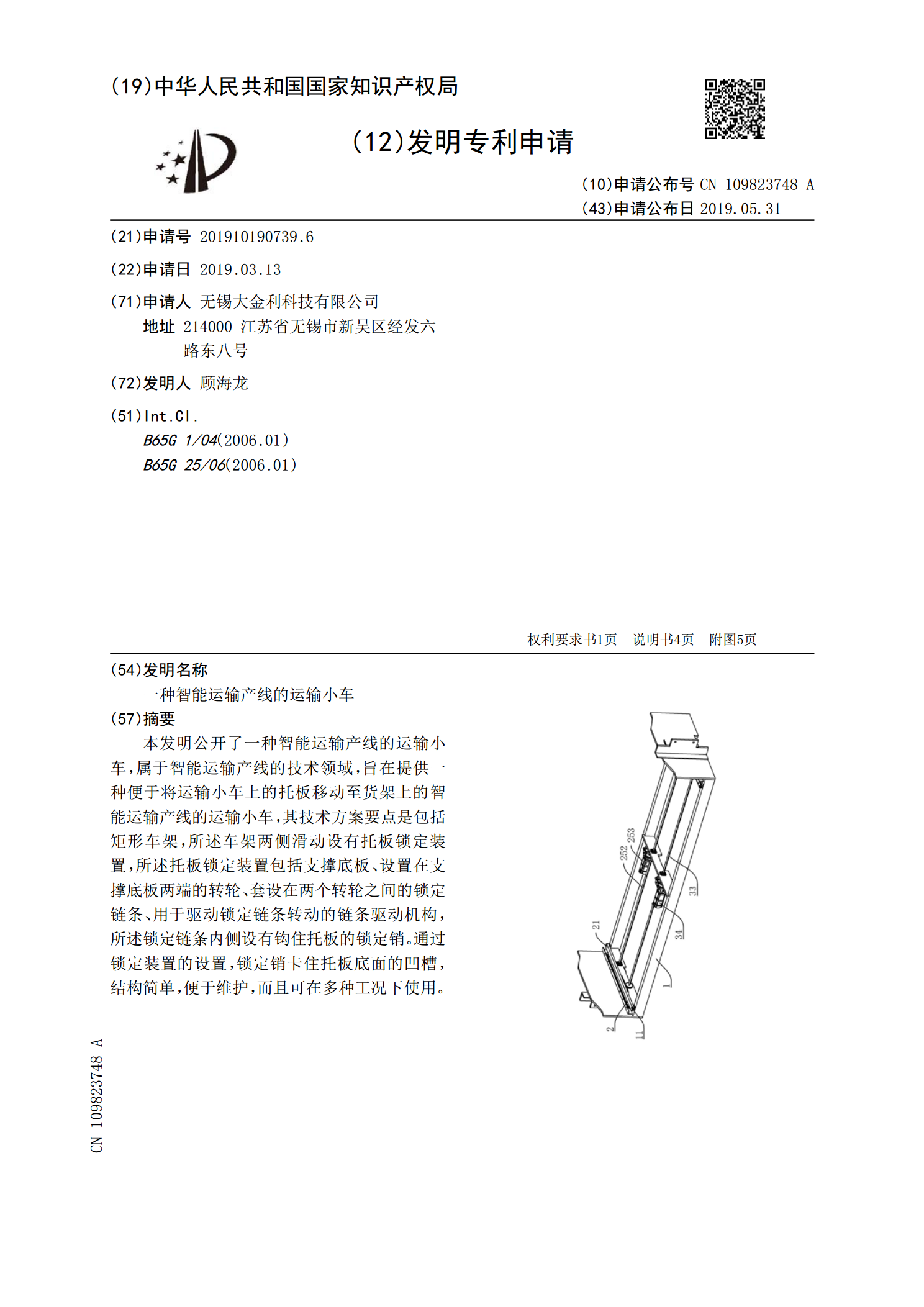
本发明公开了一种智能运输产线的运输小车,属于智能运输产线的技术领域,旨在提供一种便于将运输小车上的托板移动至货架上的智能运输产线的运输小车,其技术方案要点是包括矩形车架,所述车架两侧滑动设有托板锁定装置,所述托板锁定装置包括支撑底板、设置在支撑底板两端的转轮、套设在两个转轮之间的锁定链条、用于驱动锁定链条转动的链条驱动机构,所述锁定链条内侧设有钩住托板的锁定销。通过锁定装置的设置,锁定销卡住托板底面的凹槽,结构简单,便于维护,而且可在多种工况下使用。