
底盘及移动机器人.pdf

元容****少女

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
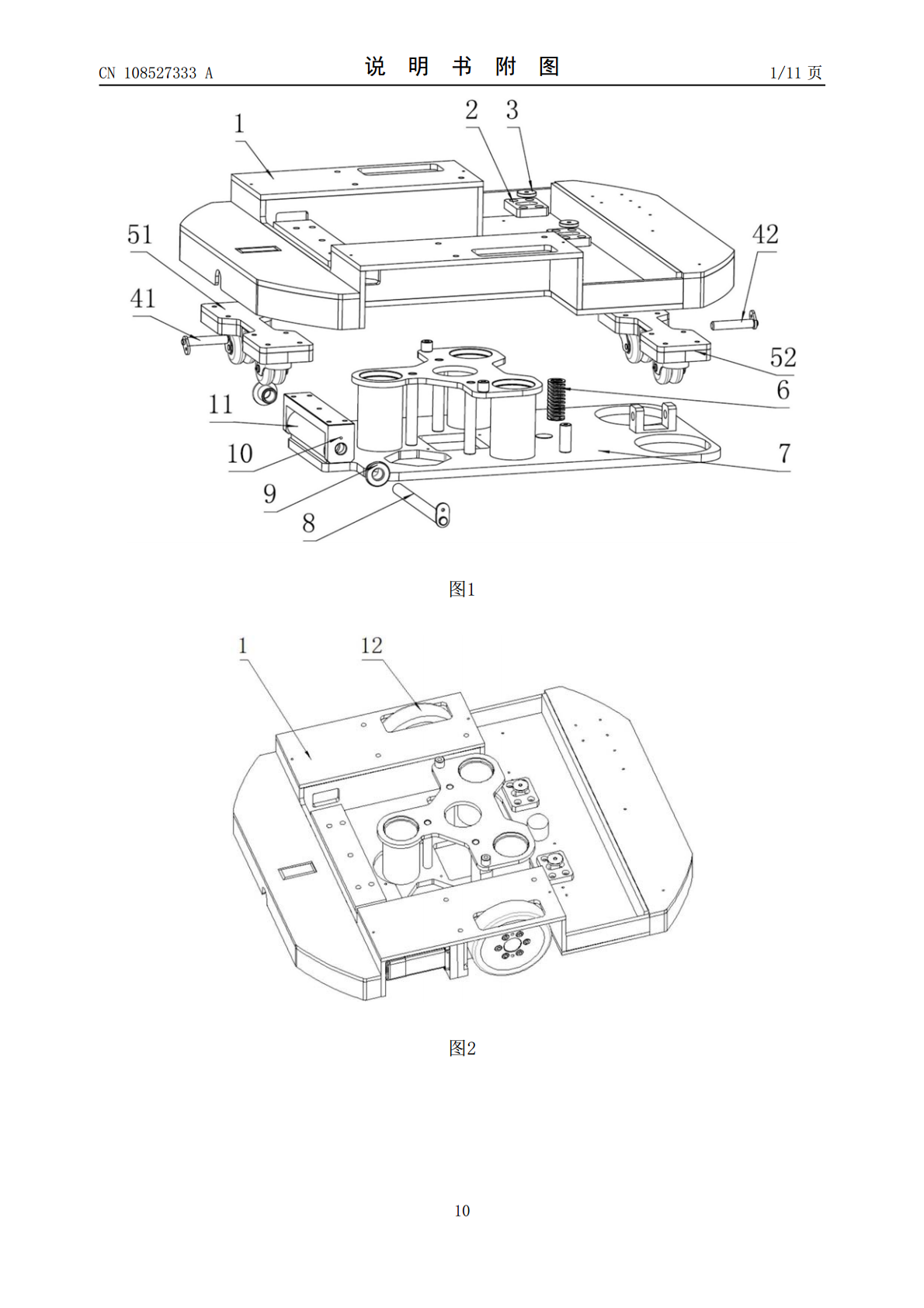
移动机器人底盘.pdf
本发明适用于机器人技术领域,提供了一种移动机器人底盘,包括:车架和分别与车架连接的转向组件和驱动组件,转向组件包括转向部和与转向部连接的悬架,转向部包括转向轮、与转向轮连接的连接杆、分别与连接杆连接的固定杆及第一连杆和设于固定杆上的舵机,第一连杆上连接设有拉杆和与拉杆连接的第二连杆,连接杆、拉杆与转向轮上的关节轴承相连接,以形成一个阿克曼梯形,悬架包括分别设于固定杆上的转轴、弹簧座和角铁,转轴与车架连接,角铁及弹簧座与舵机之间均设有第一弹簧。本发明通过角铁、弹簧座和第一弹簧的设计,有效的防止了悬架的振动,
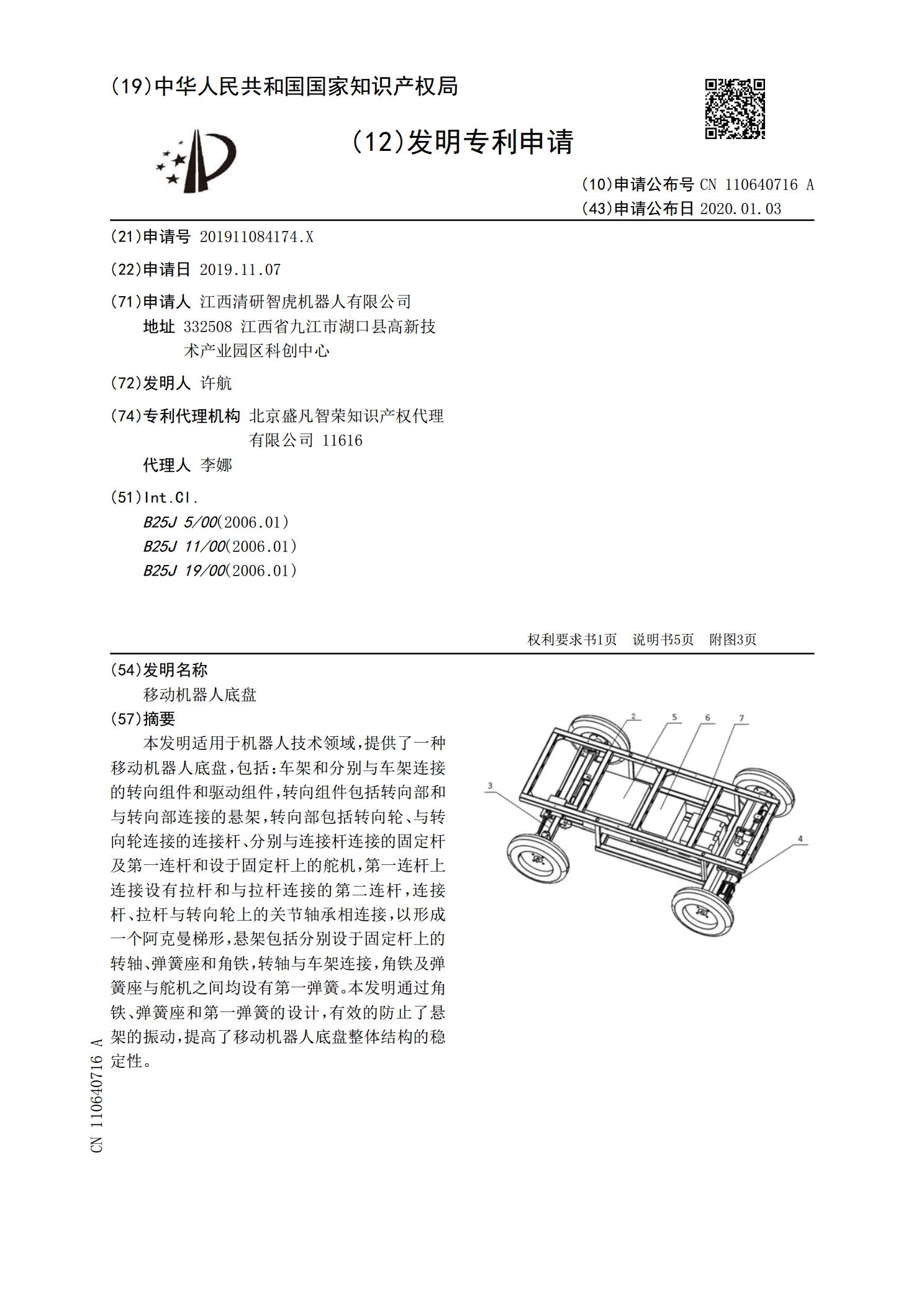
移动机器人通用底盘.pdf
本发明提供一种移动机器人通用底盘,包括:底盘,在所述底盘上设有控制电路板;安装板,所述安装板垂直设置在所述底盘的边缘;传感器,所述传感器设置在所述安装板上,所述传感器与所述控制电路板连接;全向轮,所述全向轮通过安装座设置在所述底盘上。与现有技术相比,本发明具有以下优点:结构简单、紧凑、牢固,可以很方便的快速搭建原型机,进行算法验证拓展。把传感器设置在圆柱体侧壁的设计,在调试碰到问题时,可以快速方便地调整更换传感器。减少研发周期,降低研发成本。
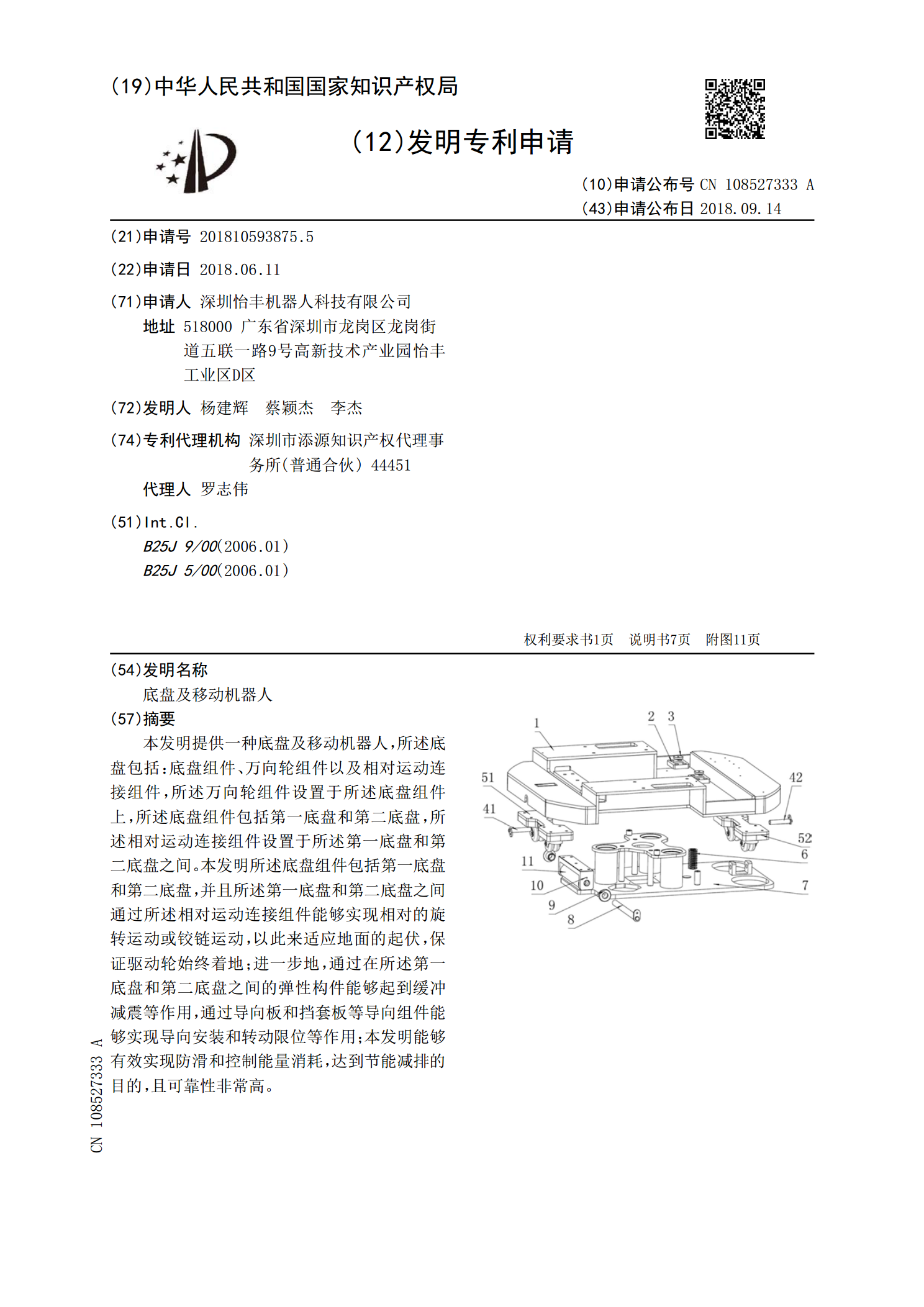
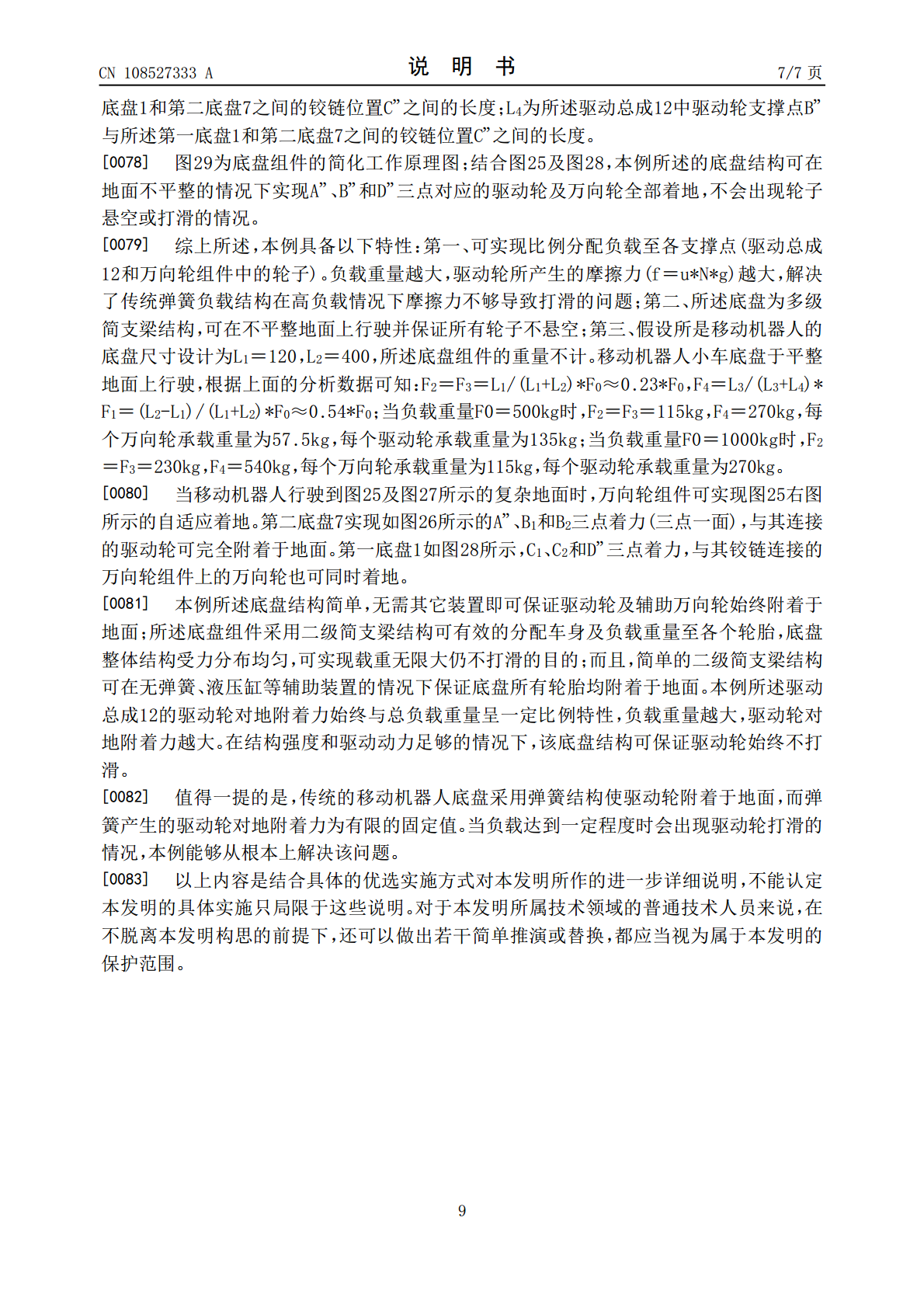
底盘及移动机器人.pdf
本发明提供一种底盘及移动机器人,所述底盘包括:底盘组件、万向轮组件以及相对运动连接组件,所述万向轮组件设置于所述底盘组件上,所述底盘组件包括第一底盘和第二底盘,所述相对运动连接组件设置于所述第一底盘和第二底盘之间。本发明所述底盘组件包括第一底盘和第二底盘,并且所述第一底盘和第二底盘之间通过所述相对运动连接组件能够实现相对的旋转运动或铰链运动,以此来适应地面的起伏,保证驱动轮始终着地;进一步地,通过在所述第一底盘和第二底盘之间的弹性构件能够起到缓冲减震等作用,通过导向板和挡套板等导向组件能够实现导向安装和转
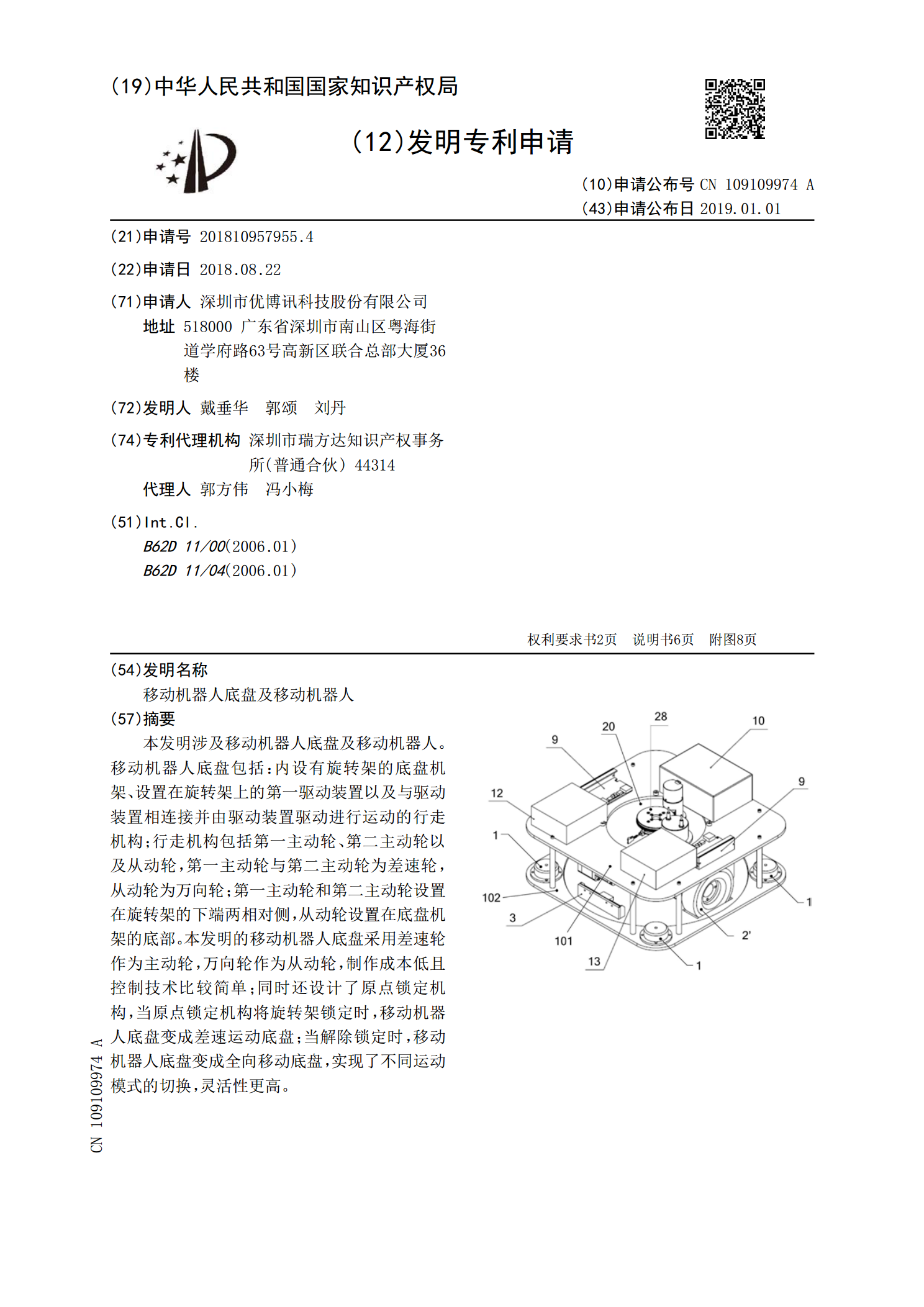
移动机器人底盘及移动机器人.pdf
本发明涉及移动机器人底盘及移动机器人。移动机器人底盘包括:内设有旋转架的底盘机架、设置在旋转架上的第一驱动装置以及与驱动装置相连接并由驱动装置驱动进行运动的行走机构;行走机构包括第一主动轮、第二主动轮以及从动轮,第一主动轮与第二主动轮为差速轮,从动轮为万向轮;第一主动轮和第二主动轮设置在旋转架的下端两相对侧,从动轮设置在底盘机架的底部。本发明的移动机器人底盘采用差速轮作为主动轮,万向轮作为从动轮,制作成本低且控制技术比较简单;同时还设计了原点锁定机构,当原点锁定机构将旋转架锁定时,移动机器人底盘变成差速运
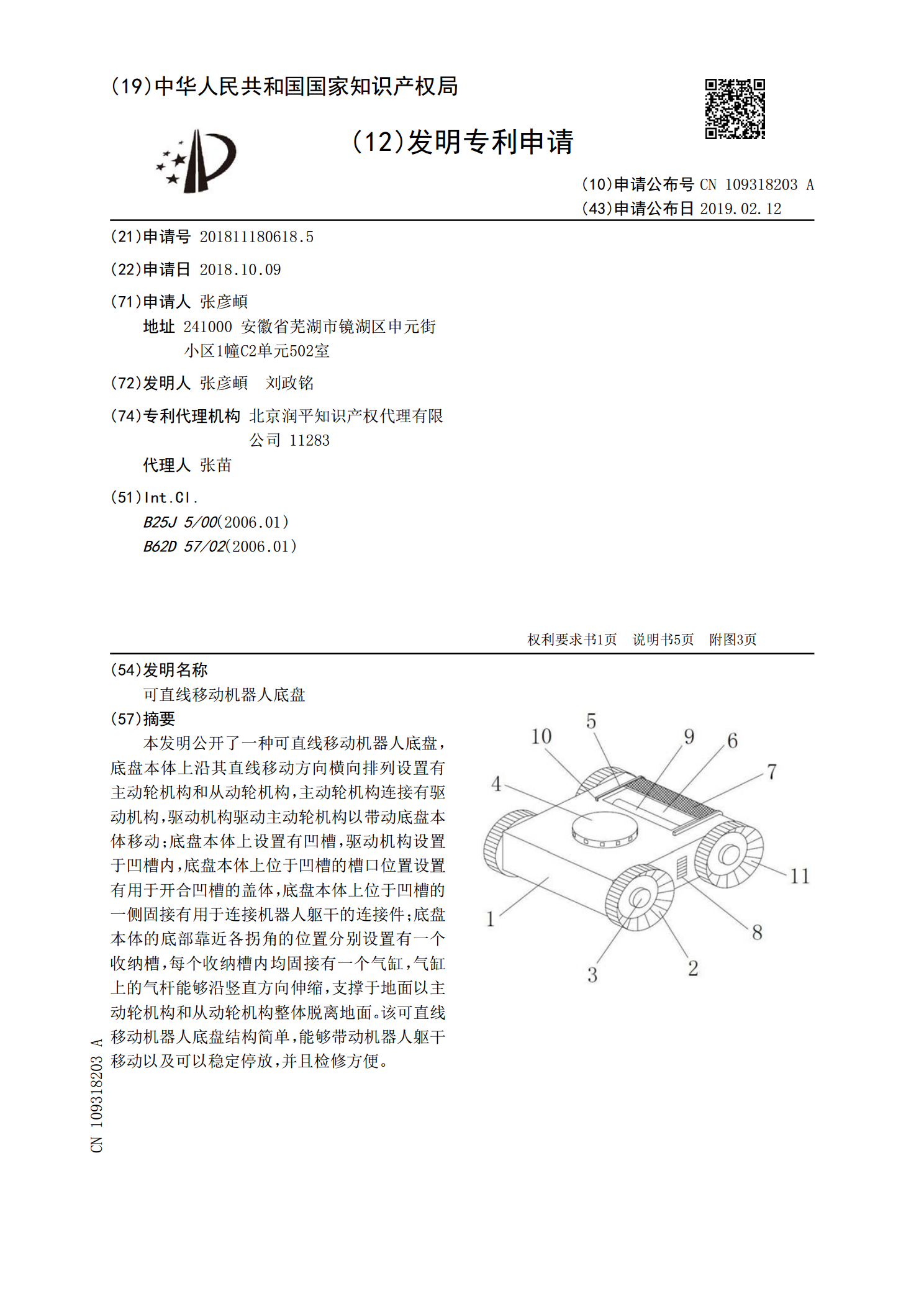
可直线移动机器人底盘.pdf
本发明公开了一种可直线移动机器人底盘,底盘本体上沿其直线移动方向横向排列设置有主动轮机构和从动轮机构,主动轮机构连接有驱动机构,驱动机构驱动主动轮机构以带动底盘本体移动;底盘本体上设置有凹槽,驱动机构设置于凹槽内,底盘本体上位于凹槽的槽口位置设置有用于开合凹槽的盖体,底盘本体上位于凹槽的一侧固接有用于连接机器人躯干的连接件;底盘本体的底部靠近各拐角的位置分别设置有一个收纳槽,每个收纳槽内均固接有一个气缸,气缸上的气杆能够沿竖直方向伸缩,支撑于地面以主动轮机构和从动轮机构整体脱离地面。该可直线移动机器人底盘