
一种汽车灯光调节执行机构及其工作方法.pdf

玉军****la


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽车灯光调节执行机构及其工作方法.pdf
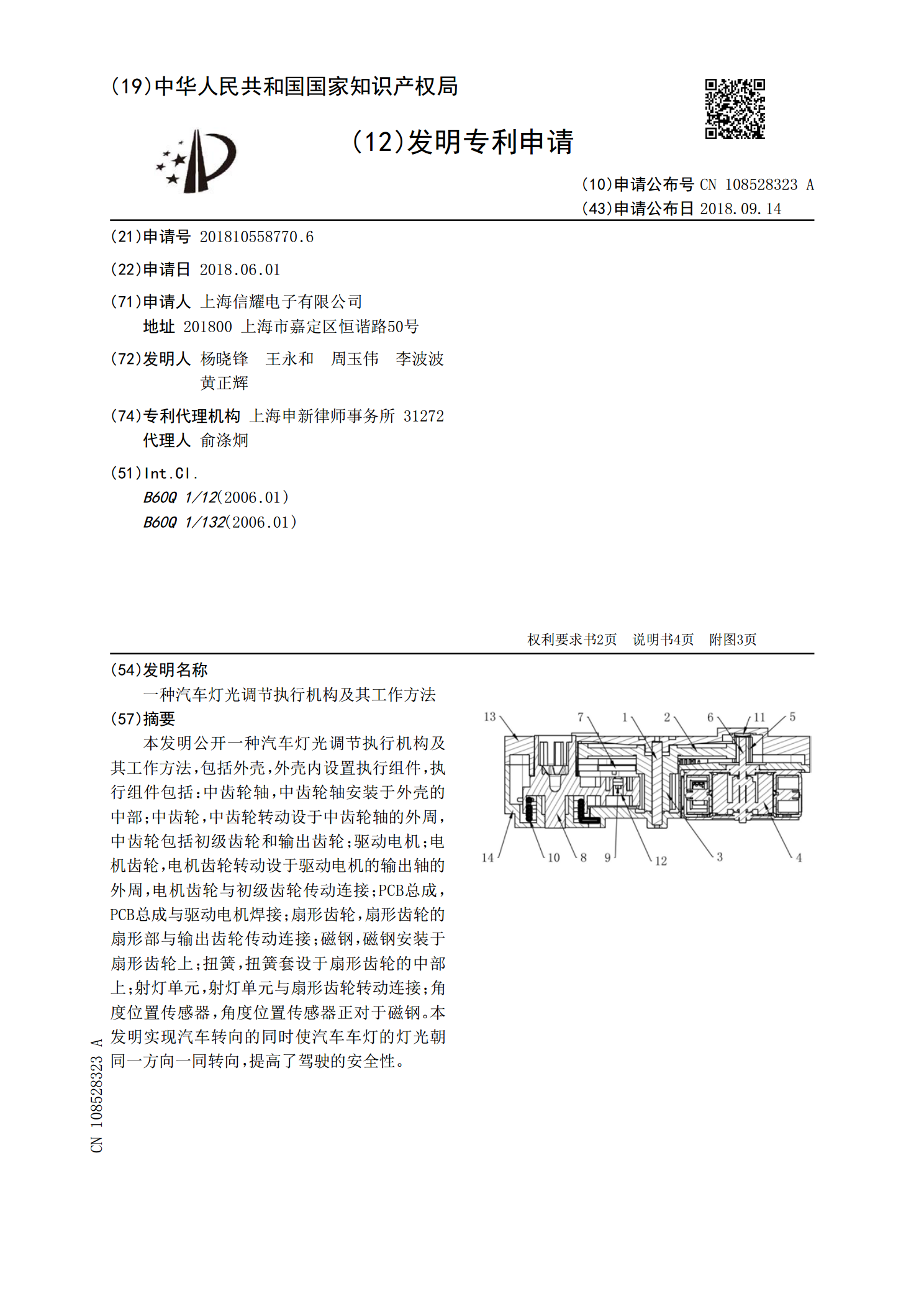
本发明公开一种汽车灯光调节执行机构及其工作方法,包括外壳,外壳内设置执行组件,执行组件包括:中齿轮轴,中齿轮轴安装于外壳的中部;中齿轮,中齿轮转动设于中齿轮轴的外周,中齿轮包括初级齿轮和输出齿轮;驱动电机;电机齿轮,电机齿轮转动设于驱动电机的输出轴的外周,电机齿轮与初级齿轮传动连接;PCB总成,PCB总成与驱动电机焊接;扇形齿轮,扇形齿轮的扇形部与输出齿轮传动连接;磁钢,磁钢安装于扇形齿轮上;扭簧,扭簧套设于扇形齿轮的中部上;射灯单元,射灯单元与扇形齿轮转动连接;角度位置传感器,角度位置传感器正对于磁钢。
一种汽车用灯光调节装置.pdf
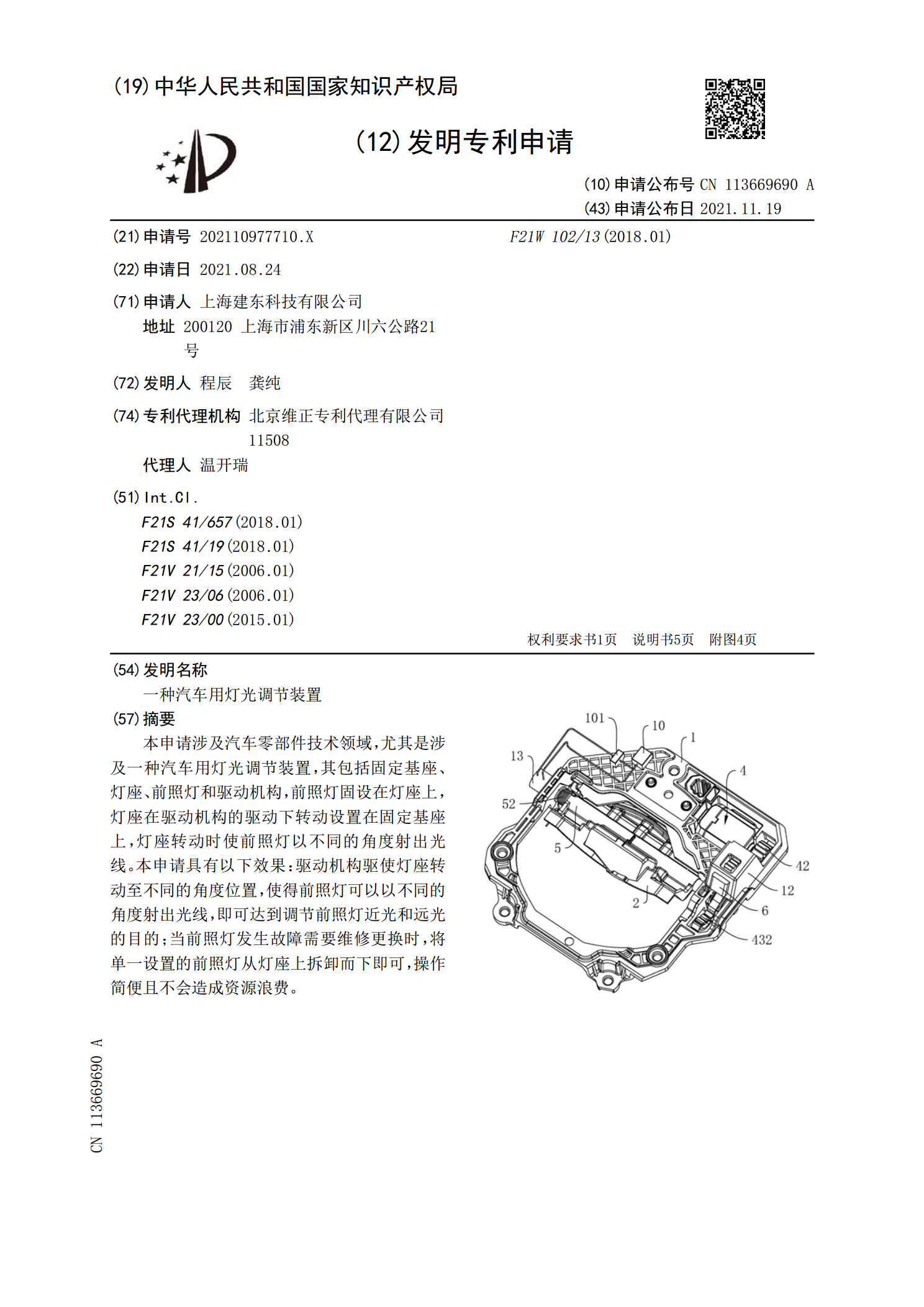
本申请涉及汽车零部件技术领域,尤其是涉及一种汽车用灯光调节装置,其包括固定基座、灯座、前照灯和驱动机构,前照灯固设在灯座上,灯座在驱动机构的驱动下转动设置在固定基座上,灯座转动时使前照灯以不同的角度射出光线。本申请具有以下效果:驱动机构驱使灯座转动至不同的角度位置,使得前照灯可以以不同的角度射出光线,即可达到调节前照灯近光和远光的目的;当前照灯发生故障需要维修更换时,将单一设置的前照灯从灯座上拆卸而下即可,操作简便且不会造成资源浪费。

一种汽车灯光调节系统.pdf
一种汽车灯光调节系统,包括照明灯系统和信号灯系统,其特征在于:还包括单片机以及与单片机连接的传感器、CAN收发器、开关,所述照明灯系统和信号灯系统与单片机连接。本设计可以根据外部行车环境的变化,随时调整车灯亮度:1)当环境亮度增强时,信号灯的亮度增强;环境亮度减弱时,照明灯的亮度增强。2)由于将车灯亮度瞬间降低具有一定的危险性,所以在降低车灯亮度时,需做两次判断:在环境亮度增强时,照明灯的亮度并不立即减弱,而是继续等待一个周期,若环境亮度保持在较低的值没有变化,再将照明灯调暗;在环境亮度减弱时,对信号灯采

一种汽车灯光调节系统.pdf
一种汽车灯光调节系统,包括照明灯系统和信号灯系统,其特征在于:还包括单片机以及与单片机连接的传感器、CAN收发器、开关,所述照明灯系统和信号灯系统与单片机连接。本设计可以根据外部行车环境的变化,随时调整车灯亮度:1)当环境亮度增强时,信号灯的亮度增强;环境亮度减弱时,照明灯的亮度增强。2)由于将车灯亮度瞬间降低具有一定的危险性,所以在降低车灯亮度时,需做两次判断:在环境亮度增强时,照明灯的亮度并不立即减弱,而是继续等待一个周期,若环境亮度保持在较低的值没有变化,再将照明灯调暗;在环境亮度减弱时,对信号灯采
一种无人驾驶汽车的灯光调节装置.pdf
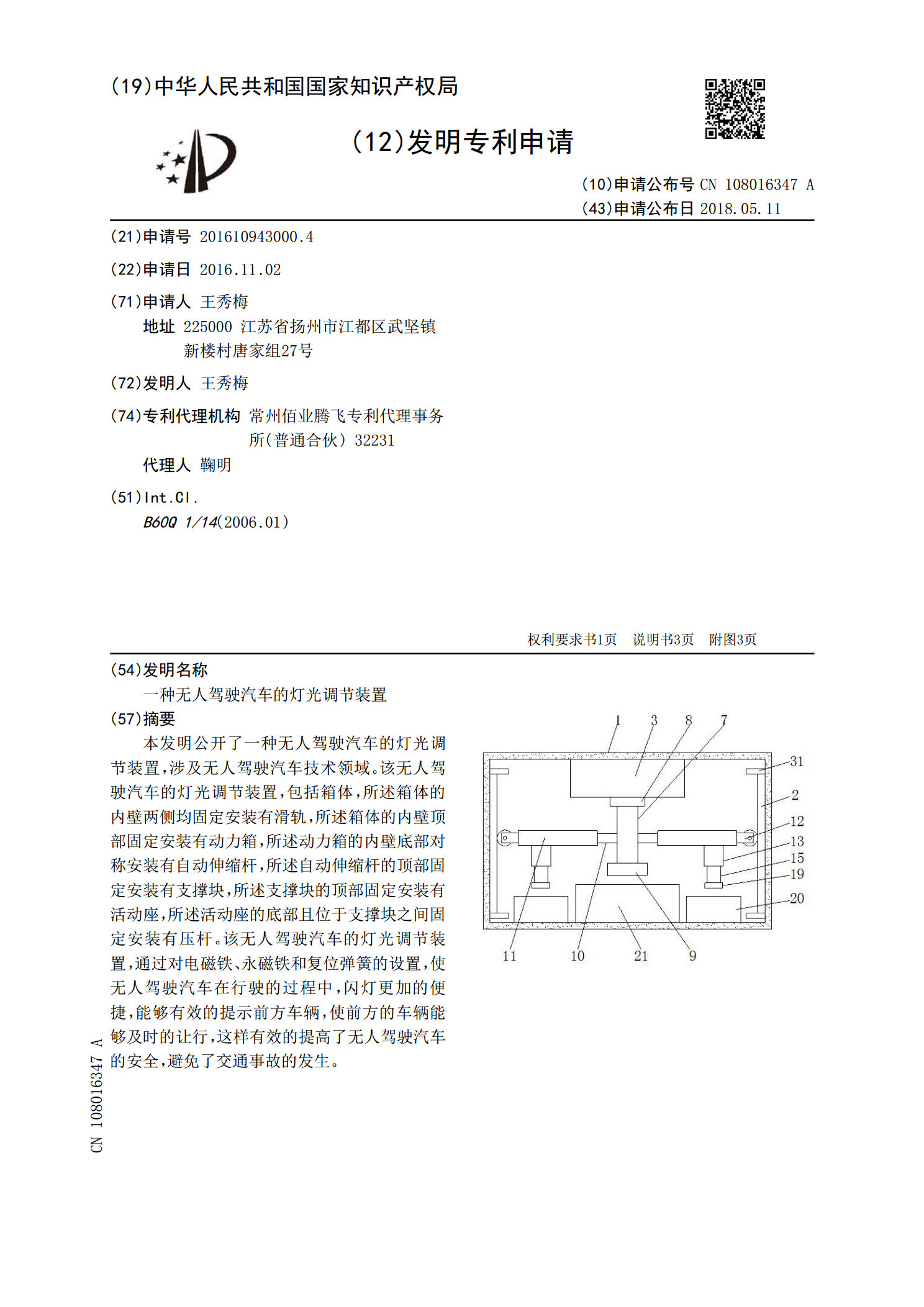
本发明公开了一种无人驾驶汽车的灯光调节装置,涉及无人驾驶汽车技术领域。该无人驾驶汽车的灯光调节装置,包括箱体,所述箱体的内壁两侧均固定安装有滑轨,所述箱体的内壁顶部固定安装有动力箱,所述动力箱的内壁底部对称安装有自动伸缩杆,所述自动伸缩杆的顶部固定安装有支撑块,所述支撑块的顶部固定安装有活动座,所述活动座的底部且位于支撑块之间固定安装有压杆。该无人驾驶汽车的灯光调节装置,通过对电磁铁、永磁铁和复位弹簧的设置,使无人驾驶汽车在行驶的过程中,闪灯更加的便捷,能够有效的提示前方车辆,使前方的车辆能够及时的让行,