
一种基于kinect视觉的AGV导航方法.pdf

邻家****mk


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于kinect视觉的AGV导航方法.pdf
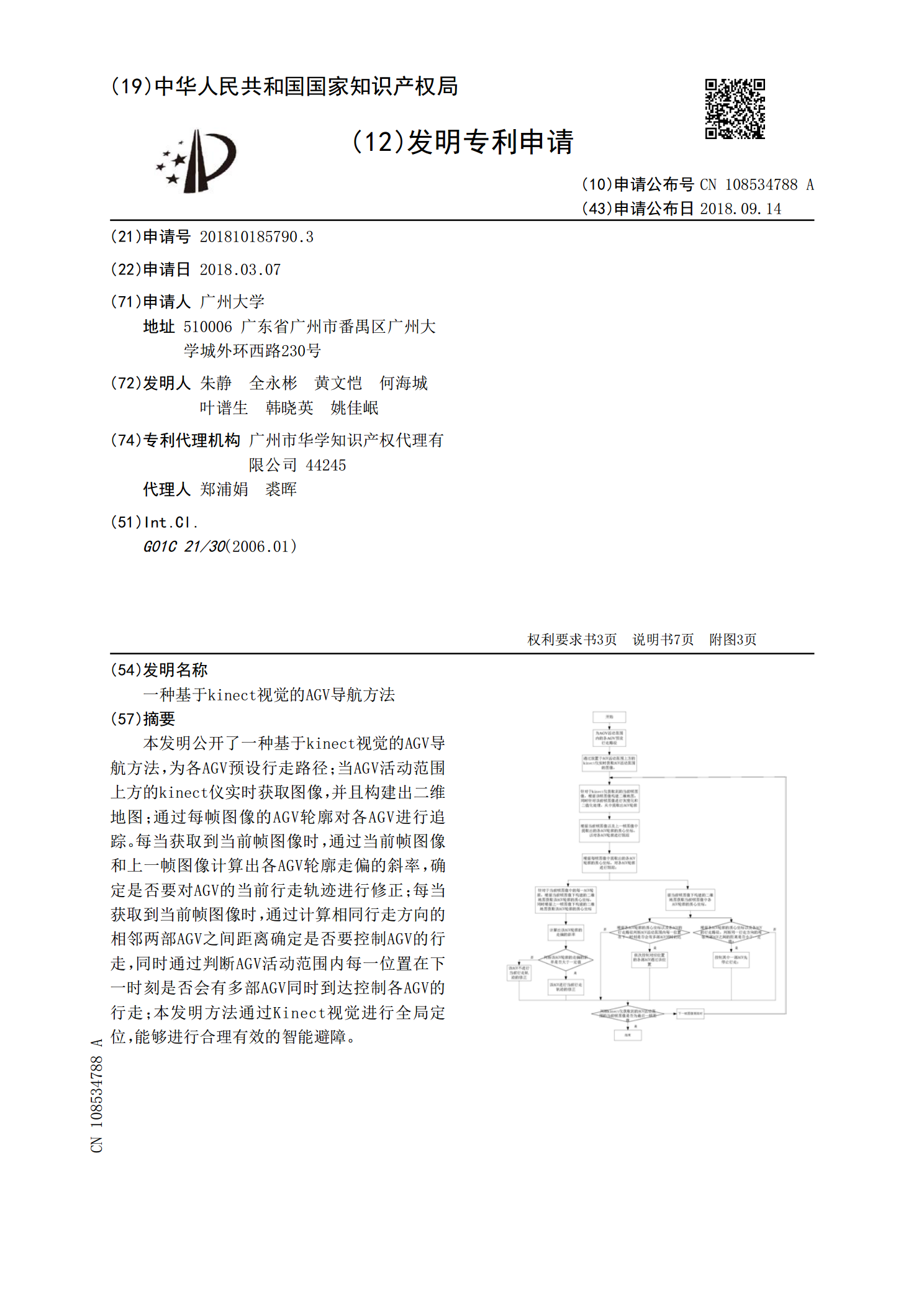
本发明公开了一种基于kinect视觉的AGV导航方法,为各AGV预设行走路径;当AGV活动范围上方的kinect仪实时获取图像,并且构建出二维地图;通过每帧图像的AGV轮廓对各AGV进行追踪。每当获取到当前帧图像时,通过当前帧图像和上一帧图像计算出各AGV轮廓走偏的斜率,确定是否要对AGV的当前行走轨迹进行修正;每当获取到当前帧图像时,通过计算相同行走方向的相邻两部AGV之间距离确定是否要控制AGV的行走,同时通过判断AGV活动范围内每一位置在下一时刻是否会有多部AGV同时到达控制各AGV的行走;本发明方
一种基于视觉的AGV巡线导航和定位方法.pdf
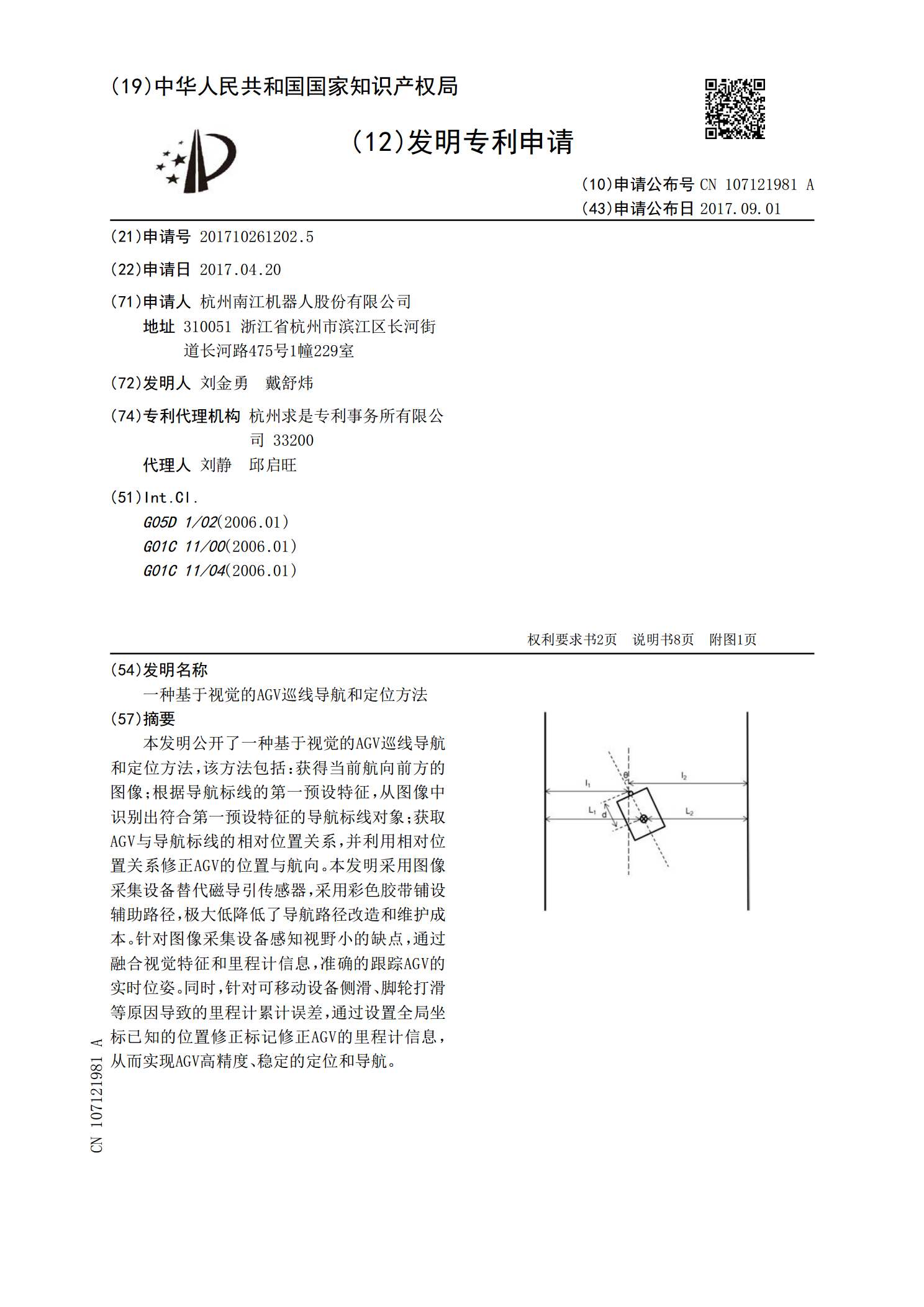
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐

一种基于视觉导航的AGV控制系统.pdf
本发明公开了一种基于视觉导航的AGV控制系统,包括摄像头、上位机、控制器、转向测控模块和驱动测控模块,上位机内设有图像采集卡,图像采集卡的输入端与摄像头的输出端相连,控制器与上位机之间相连;转向测控模块包括转角测量单元和转向机构控制模块;转角测量单元输出端与控制器输入端相连;转向机构控制模块的输入端与控制器相连,转向机构控制模块的输出端连接有第一驱动电机,第一驱动电机用于与AGV的后轮相连;驱动测控模块包括速度控制器和驱动机构控制模块;速度控制器的输入端与控制器相连,其输出端与驱动机构控制模块的控制端相连

基于raspberry Pi 的AGV视觉导航设计.ppt
哈尔滨工业大学(威海)控制科学与工程系姓名:殷鹏导师:谢玮课题背景主要内容:一、总体设计方案一、总体设计方案一、总体设计方案一、总体设计方案一、总体设计方案二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析四、模糊预瞄的控制算法实现四、模糊预瞄的控制算法实现四、模糊预

一种基于Kinect的视觉SLAM方法.pdf
本发明涉及一种基于Kinect的视觉SLAM方法,涉及计算机视觉技术领域。采用本发明基于Kinect的视觉SLAM方法,在视觉里程计环节通过结合主成分分析法将传统的SIFT算法降维得到PCA‑SIFT算法,并将匹配时的所用的欧式距离改为街区距离和棋盘距离的线性组合,提高了整体视觉SLAM的实时性。在回环检测中,首先提取关键帧的轮廓进行轮廓匹配缩减所需要进行相似性检测的关键帧数量,然后利用词袋模型进行二次回环精确回环检测,提高了回环检测的鲁棒性。