
一种基于Kinect的视觉SLAM方法.pdf

如灵****姐姐

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于Kinect的视觉SLAM方法.pdf
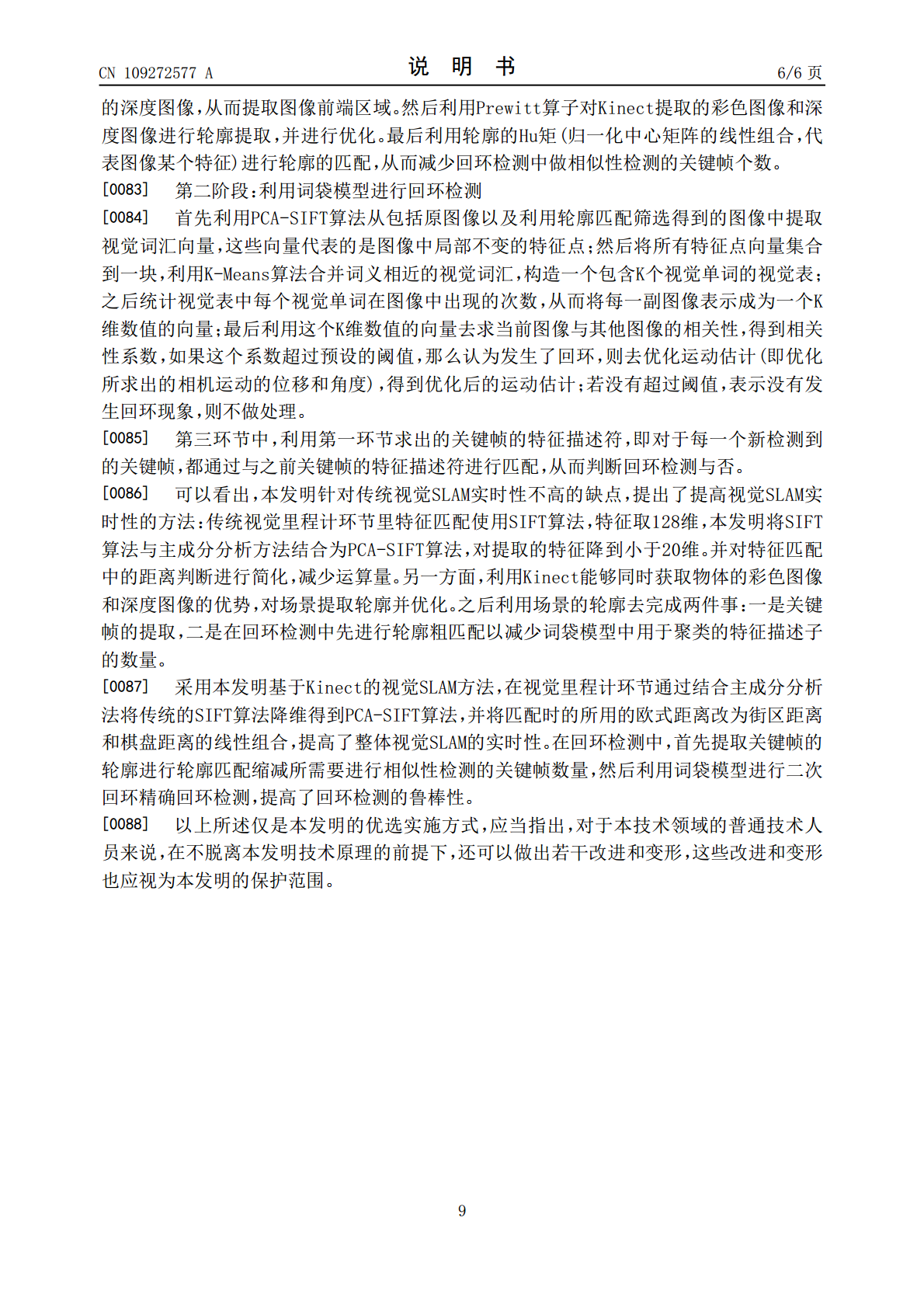
本发明涉及一种基于Kinect的视觉SLAM方法,涉及计算机视觉技术领域。采用本发明基于Kinect的视觉SLAM方法,在视觉里程计环节通过结合主成分分析法将传统的SIFT算法降维得到PCA‑SIFT算法,并将匹配时的所用的欧式距离改为街区距离和棋盘距离的线性组合,提高了整体视觉SLAM的实时性。在回环检测中,首先提取关键帧的轮廓进行轮廓匹配缩减所需要进行相似性检测的关键帧数量,然后利用词袋模型进行二次回环精确回环检测,提高了回环检测的鲁棒性。

基于双Kinect的视觉SLAM方法的研究.docx
基于双Kinect的视觉SLAM方法的研究基于双Kinect的视觉SLAM方法的研究摘要:视觉SLAM技术是机器人导航和实际场景中的三维建模的基础。本文提出了一种基于双Kinect的视觉SLAM方法,利用两个具有不同位置和方向的Kinect传感器进行三维建模。该方法利用双目视觉的立体匹配算法和传感器之间的相对位置信息,进行定位和建图。将双Kinect视觉SLAM与传统的单Kinect视觉SLAM进行比较,结果表明双Kinect视觉SLAM具有更快的计算速度和更高的精度。关键词:视觉SLAM,双Kinect

基于Kinect的视觉SLAM算法研究.docx
基于Kinect的视觉SLAM算法研究基于Kinect的视觉SLAM算法研究摘要:随着计算机视觉和机器人技术的快速发展,视觉SLAM(SimultaneousLocalizationandMapping)成为了研究的热点之一。本文以利用MicrosoftKinect传感器实现视觉SLAM为研究对象,综述了当前基于Kinect的视觉SLAM算法,并对其进行分析和评价,最后提出了未来的研究方向。1.引言视觉SLAM是指通过相机的视觉信息进行实时地环境感知、自主定位和建图的技术。它在自主导航、虚拟现实、增强现实

基于Kinect摄像头的视觉SLAM算法.docx
基于Kinect摄像头的视觉SLAM算法摘要本文介绍了基于Kinect摄像头的视觉SLAM算法,该算法可以实现室内环境下的三维建图和导航。我们首先介绍Kinect摄像头的工作原理和它在SLAM中的作用。接着,我们介绍点云数据的获取,以及Kinect摄像头的深度图像和彩色图像的处理。然后使用点云数据,使用ICP算法进行匹配,以估计相邻帧的位姿变换。最后,使用经过优化的位姿和点云数据,进行三维建图和导航。我们在多种场景下对该算法进行了测试,并得到了良好的结果。最终证实,这种基于Kinect的SLAM算法非常有
一种基于kinect视觉的AGV导航方法.pdf
本发明公开了一种基于kinect视觉的AGV导航方法,为各AGV预设行走路径;当AGV活动范围上方的kinect仪实时获取图像,并且构建出二维地图;通过每帧图像的AGV轮廓对各AGV进行追踪。每当获取到当前帧图像时,通过当前帧图像和上一帧图像计算出各AGV轮廓走偏的斜率,确定是否要对AGV的当前行走轨迹进行修正;每当获取到当前帧图像时,通过计算相同行走方向的相邻两部AGV之间距离确定是否要控制AGV的行走,同时通过判断AGV活动范围内每一位置在下一时刻是否会有多部AGV同时到达控制各AGV的行走;本发明方