
一种基于视觉导航的AGV控制系统.pdf

慧颖****23


1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于视觉导航的AGV控制系统.pdf
本发明公开了一种基于视觉导航的AGV控制系统,包括摄像头、上位机、控制器、转向测控模块和驱动测控模块,上位机内设有图像采集卡,图像采集卡的输入端与摄像头的输出端相连,控制器与上位机之间相连;转向测控模块包括转角测量单元和转向机构控制模块;转角测量单元输出端与控制器输入端相连;转向机构控制模块的输入端与控制器相连,转向机构控制模块的输出端连接有第一驱动电机,第一驱动电机用于与AGV的后轮相连;驱动测控模块包括速度控制器和驱动机构控制模块;速度控制器的输入端与控制器相连,其输出端与驱动机构控制模块的控制端相连
一种基于kinect视觉的AGV导航方法.pdf
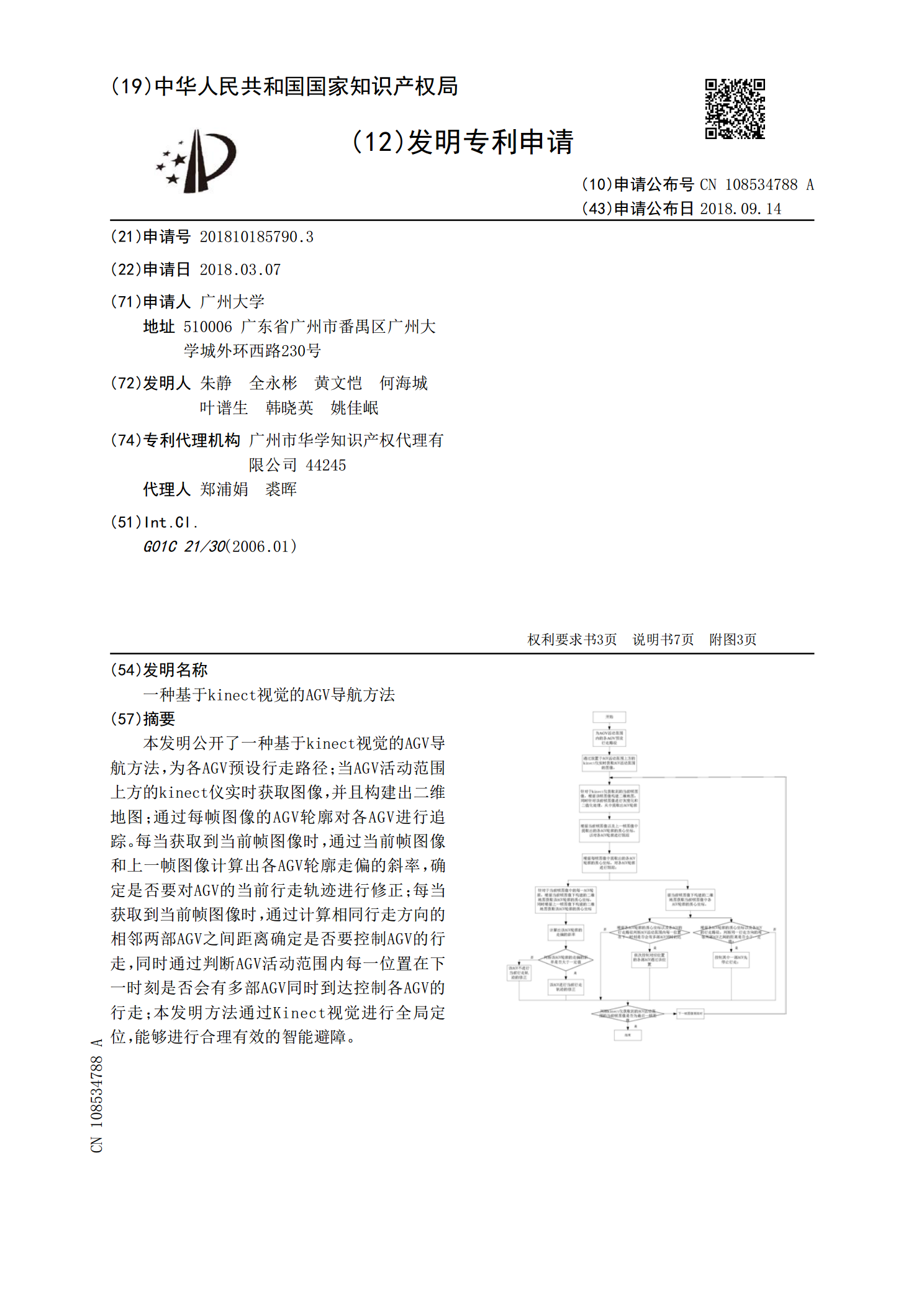
本发明公开了一种基于kinect视觉的AGV导航方法,为各AGV预设行走路径;当AGV活动范围上方的kinect仪实时获取图像,并且构建出二维地图;通过每帧图像的AGV轮廓对各AGV进行追踪。每当获取到当前帧图像时,通过当前帧图像和上一帧图像计算出各AGV轮廓走偏的斜率,确定是否要对AGV的当前行走轨迹进行修正;每当获取到当前帧图像时,通过计算相同行走方向的相邻两部AGV之间距离确定是否要控制AGV的行走,同时通过判断AGV活动范围内每一位置在下一时刻是否会有多部AGV同时到达控制各AGV的行走;本发明方

基于raspberry Pi 的AGV视觉导航设计.ppt
哈尔滨工业大学(威海)控制科学与工程系姓名:殷鹏导师:谢玮课题背景主要内容:一、总体设计方案一、总体设计方案一、总体设计方案一、总体设计方案一、总体设计方案二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理二、图像处理三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析三、驱动控制部分的设计与分析四、模糊预瞄的控制算法实现四、模糊预瞄的控制算法实现四、模糊预

基于raspberrypi的agv视觉导航设计大学论文.doc
本科毕业论文(设计)题目:基于QTP的自动化测试姓名:张海波学号:1042157124专业:计算机科学与技术院系:信息工程学院指导老师:钱丽职称学位:讲师/硕士完成时间:2014年5月12日教务处制安徽新华学院本科毕业论文(设计)独创承诺书本人按照毕业论文(设计)进度计划积极开展实验(调查)研究活动,实事求是地做好实验(调查)记录,所呈交的毕业论文(设计)是我个人在导师指导下进行的研究工作及取得的研究成果。据我所知,除文中特别加以标注引用参考文献资料外,论文(设计)中所有数据均为自己研究成果,不包含其他人

基于raspberrypi的agv视觉导航设计大学论文.doc
本科毕业论文(设计)题目:基于QTP的自动化测试姓名:张海波学号:1042157124专业:计算机科学与技术院系:信息工程学院指导老师:钱丽职称学位:讲师/硕士完成时间:2014年5月12日教务处制安徽新华学院本科毕业论文(设计)独创承诺书本人按照毕业论文(设计)进度计划积极开展实验(调查)研究活动,实事求是地做好实验(调查)记录,所呈交的毕业论文(设计)是我个人在导师指导下进行的研究工作及取得的研究成果。据我所知,除文中特别加以标注引用参考文献资料外,论文(设计)中所有数据均为自己研究成果,不包含其他人