
一种机器人移动底盘结构.pdf

是你****盟主

1/6

2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人移动底盘结构.pdf
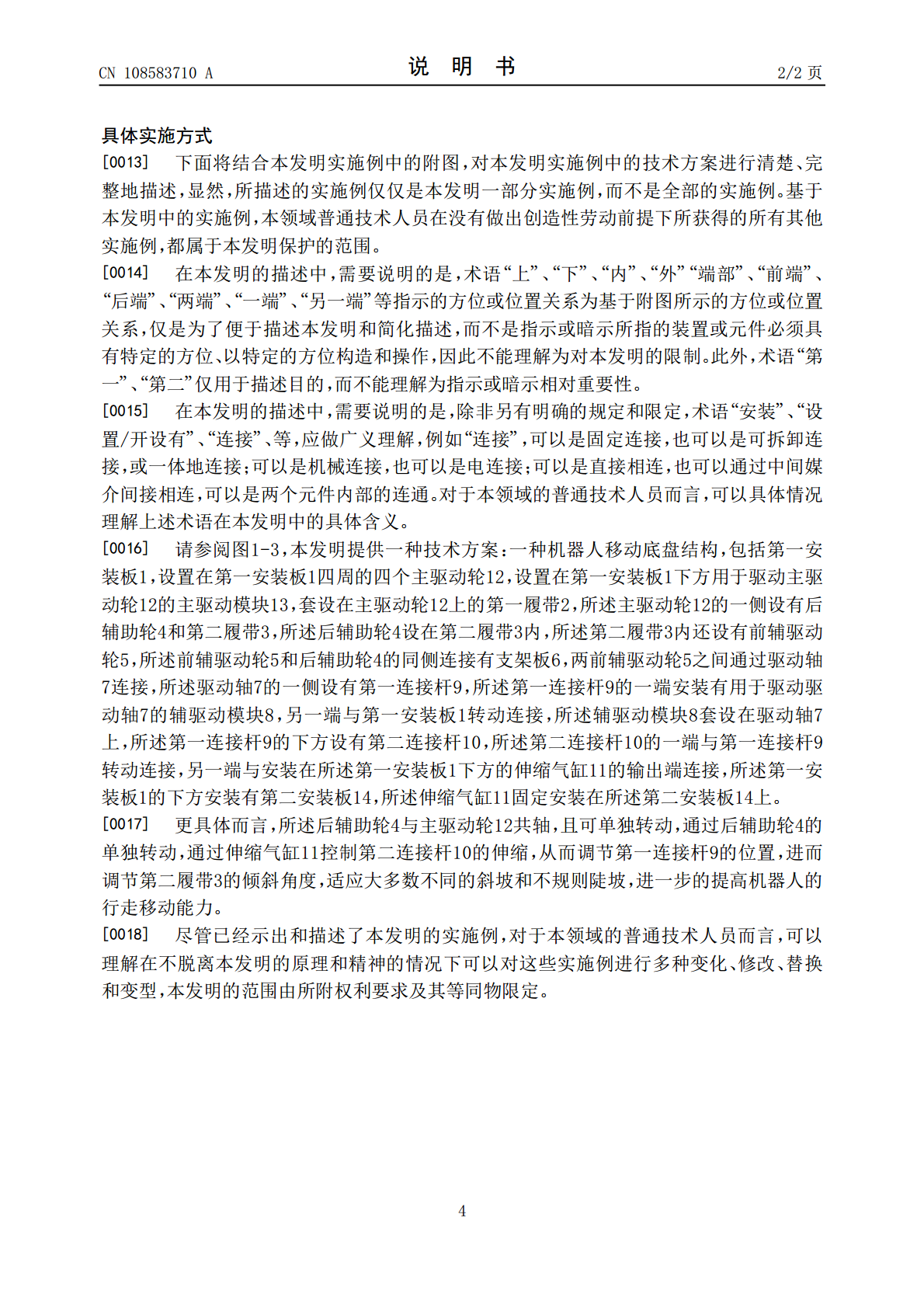
本发明公开了一种机器人移动底盘结构,包括第一安装板,设置在第一安装板四周的主驱动轮,设置在第一安装板下方用于驱动主驱动轮的主驱动模块,套设在主驱动轮上的第一履带,所述主驱动轮的一侧安装有后辅助轮和第二履带,所述后辅助轮套设在第二履带内,所述第二履带内还设有前辅驱动轮,所述前辅驱动轮和后辅助轮的同侧连接有支架板,所述驱动轴的一侧设有第一连接杆,所述第一连接杆的一端安装有用于驱动驱动轴的辅驱动模块,另一端与第一安装板转动连接,所述第一连接杆的下方设有第二连接杆,所述第二连接杆的一端与第一连接杆转动连接,另一端
一种机器人全向移动底盘结构.pdf
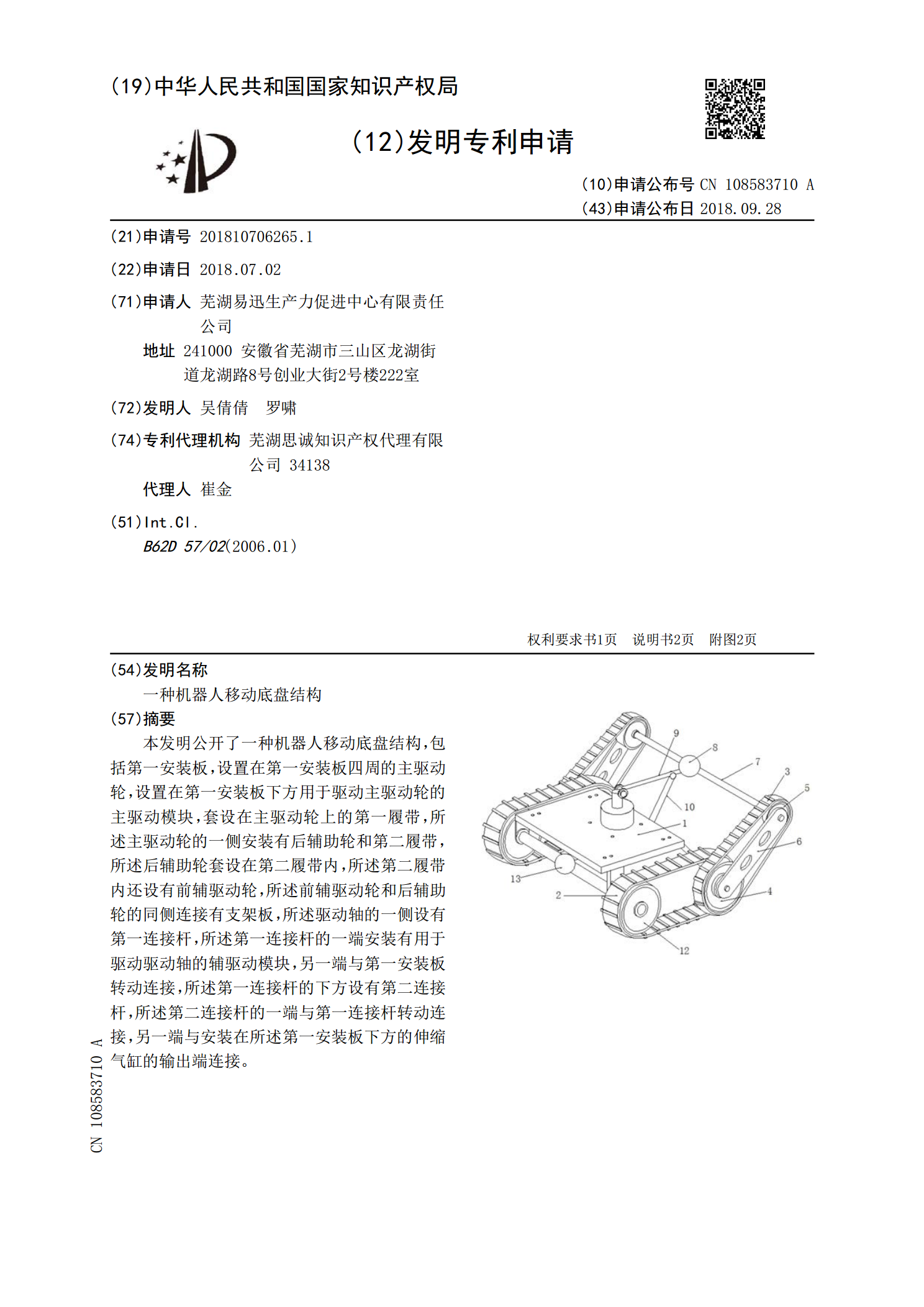
本发明涉及机器人技术领域,公开了一种机器人全向移动底盘结构,包括机器人本体、底盘,其特征在于:还包括固定设于所述底盘上的至少三个电机及与各所述电机的输出轴刚性连接的全向轮、操控终端以及设置在所述机器人本体上的微处理器,所述机器人底盘设置在格斗机器人本体的下方,所述微处理器设置在所述机器人本体的内部,所述操控终端与所述机器人本体无线连接,所述机器人底盘为正三角型或十字型,所述操控终端发出直观全向运动指令,所述全向运动指令传至所述微处理器计算后转换成对应的转动组合指令,通过电机传动实现全向轮对应的转动组合从而

一种移动机器人的底盘结构.pdf
本发明公开了一种移动机器人的底盘结构,包括底盘本体,所述底盘本体为扁平的圆柱体,所述底盘本体的两侧分别安装有第一驱动轮、第二驱动轮,所述第一驱动轮、所述第二驱动轮均连接有固定架,且所述固定架有两个,所述固定架均通过螺栓固定在所述底盘本体顶端的两侧,且所述螺栓有两对,所述固定架均安装有驱动电机,所述驱动电机的输出轴分别与所述第一驱动轮、所述第二驱动轮连接,且所述驱动电机均连接有传动杆,所述底盘本体的顶部固定安装有连接柱,所述连接柱设有两个,且所述连接柱内均设有连接孔,所述底盘本体内设有凹槽,该移动机器人的底
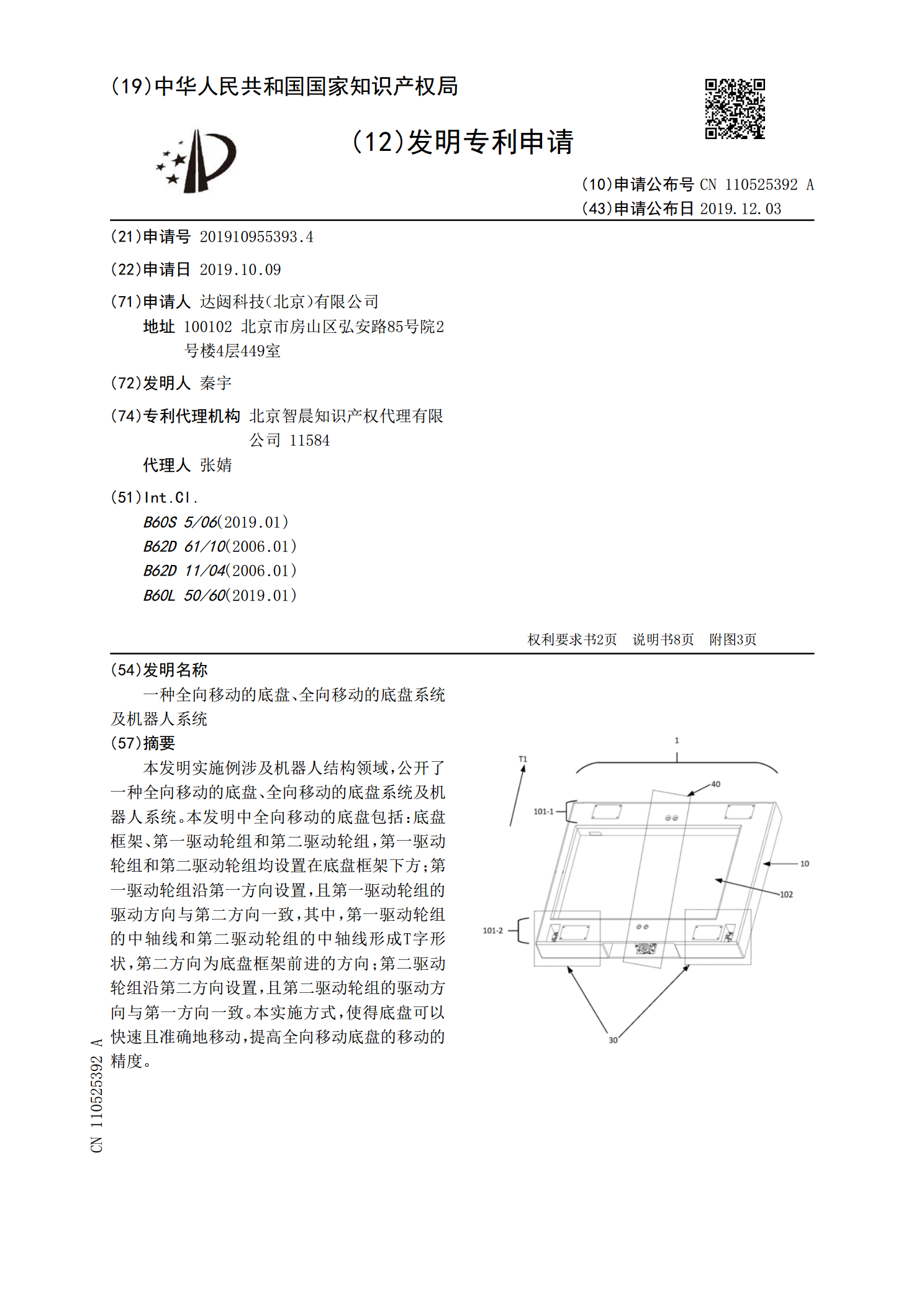
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。
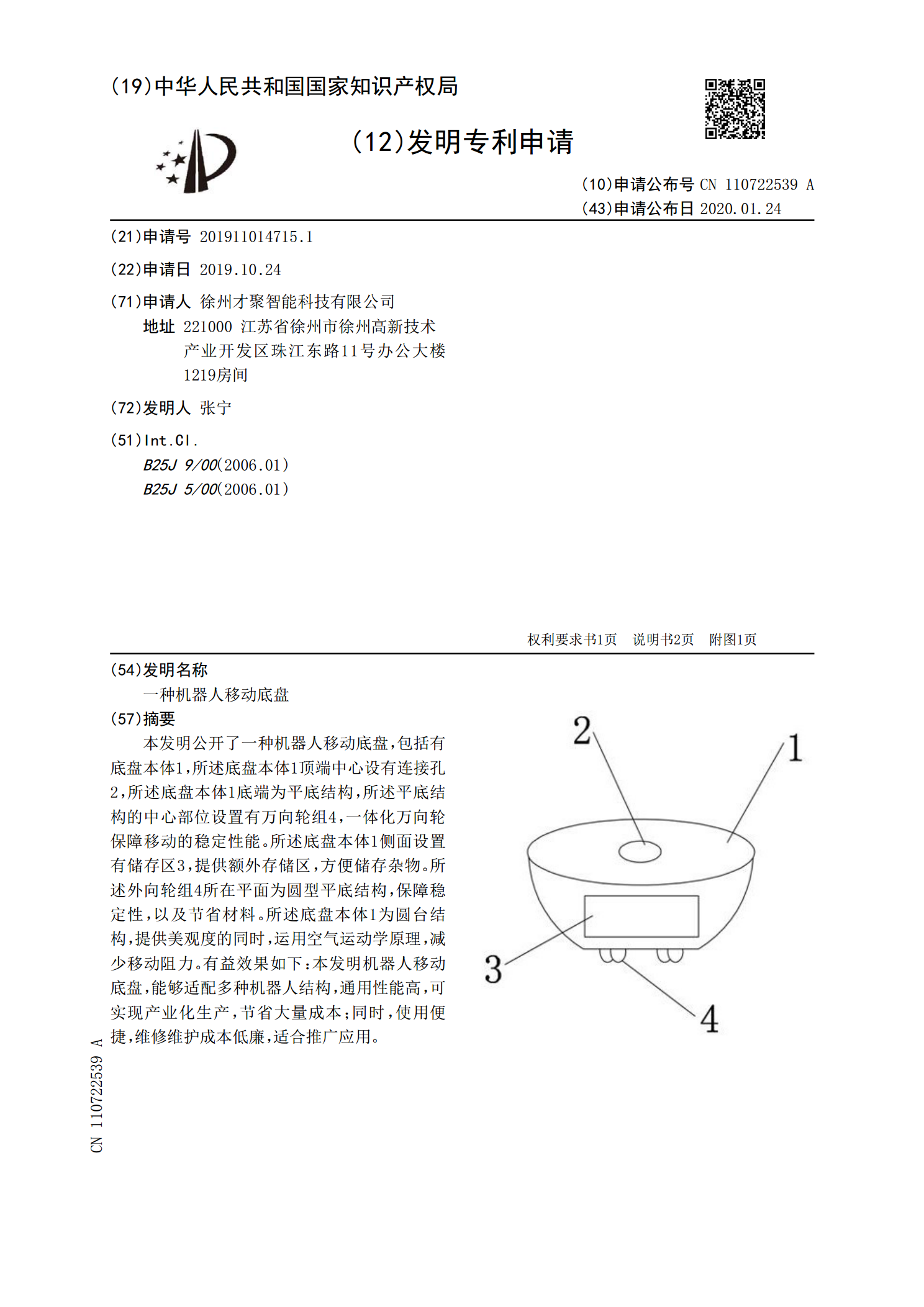
一种机器人移动底盘.pdf
本发明公开了一种机器人移动底盘,包括有底盘本体1,所述底盘本体1顶端中心设有连接孔2,所述底盘本体1底端为平底结构,所述平底结构的中心部位设置有万向轮组4,一体化万向轮保障移动的稳定性能。所述底盘本体1侧面设置有储存区3,提供额外存储区,方便储存杂物。所述外向轮组4所在平面为圆型平底结构,保障稳定性,以及节省材料。所述底盘本体1为圆台结构,提供美观度的同时,运用空气运动学原理,减少移动阻力。有益效果如下:本发明机器人移动底盘,能够适配多种机器人结构,通用性能高,可实现产业化生产,节省大量成本;同时,使用便