
一种安防机器人前轮转向底盘.pdf

慧娇****文章


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种安防机器人前轮转向底盘.pdf
本发明公开一种安防机器人前轮转向底盘,采用该种结构转向底盘使转向时所有车轮均做纯滚动,减小转向力,从而减小电机功率;且设置有减震机构,使机器人越障时车体平稳,震动小。该转向底盘包括车架、前轮组件、后轮组件和转向机构。其中前轮组件和后轮组件分别支撑在车架的前端和后端,转向机构安装在车架的下表面。在该转向底盘中前后轮及转向器的位置布置符合阿克曼转角理论,能保证在转向时所有车轮均做纯滚动,减小转向力,从而减小电机功率。

一种前轮转向机器人的底盘控制方法.pdf
本发明提供一种前轮转向机器人的底盘控制方法,能够解决轮式机器人在由前轮转向时后轮速度不易匹配的问题,防止转向时后轮打滑的现象的发生,从而能够通过后轮编码器的数据直接得到底盘准确的速度值。具体为:在所述前轮转向机器人的底盘上设置有三个电机,其中两个电机分别用来驱动两个后轮,一个电机用来驱动前轮转向;用于驱动后轮的两个电机的驱动器采用力矩模式,力矩模式下电机根据地面摩擦力的大小自动匹配速度;用于驱动前轮转向的电机的驱动器采用绝对位置模式。当前轮转向时,后轮的两个电机上的阻力会不同,则后轮会根据地面摩擦力的不同
前轮后轮分别协同转向车辆的底盘系统.pdf
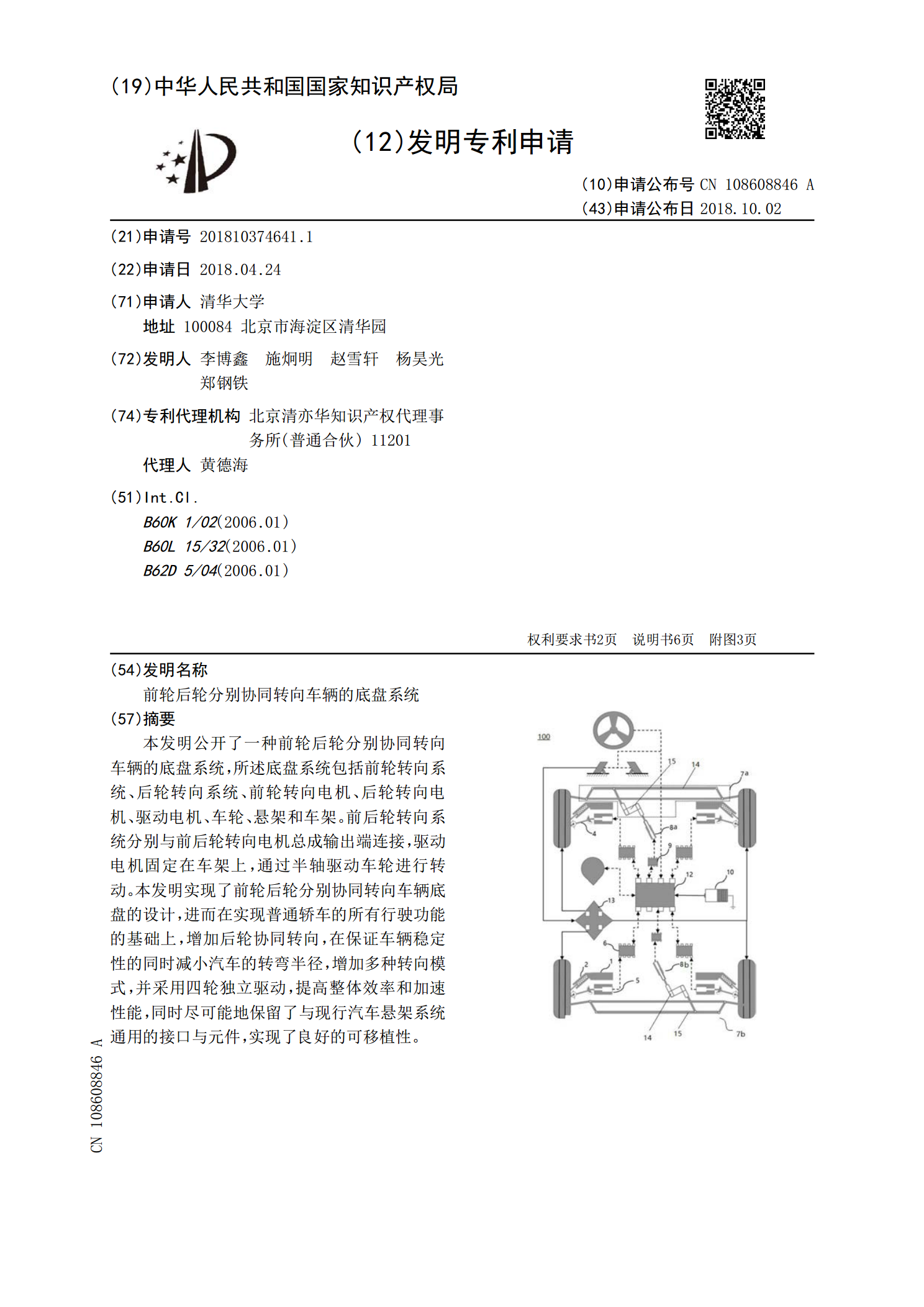
本发明公开了一种前轮后轮分别协同转向车辆的底盘系统,所述底盘系统包括前轮转向系统、后轮转向系统、前轮转向电机、后轮转向电机、驱动电机、车轮、悬架和车架。前后轮转向系统分别与前后轮转向电机总成输出端连接,驱动电机固定在车架上,通过半轴驱动车轮进行转动。本发明实现了前轮后轮分别协同转向车辆底盘的设计,进而在实现普通轿车的所有行驶功能的基础上,增加后轮协同转向,在保证车辆稳定性的同时减小汽车的转弯半径,增加多种转向模式,并采用四轮独立驱动,提高整体效率和加速性能,同时尽可能地保留了与现行汽车悬架系统通用的接口与

一种运载机器人用转向前轮.pdf
本发明涉及机器人加工制造领域,尤其涉及一种运载机器人用转向前轮,该转向前轮可以简化结构,降低操作难度,有利于节省成本。其结构包括固定座,所述的固定座上方固定设有电机减速机,所述的电机减速机与大齿轮相啮合,大齿轮与前摆臂固定连接;所述的前摆臂与转动板固定连接,转动板与固定座相铰接;转动板的底部设有滚轮。本发明的一种运载机器人用转向前轮,操作简单,使用方便,适用于多种场所。

一种灵活转向的机器人减震底盘.pdf
本发明公开了一种灵活转向的机器人减震底盘,属于机器人技术领域。它包括驱动轮组、从动轮组、底板、工字架、从动齿轮、驱动齿轮组、顶板等。两组驱动轮组对称安装于底板后部两侧,两组从动轮组对称安装于顶板两侧且位于底板前部两侧,顶板与底板间通过工字架连接,驱动齿轮组安装在底板前部并与安装于从动轮组上的从动齿轮配合。在底盘移动过程中底盘后部驱动轮组作为机器人的动力使得机器人可以前后移动,底盘前部从动轮组及驱动齿轮组共同作用使得机器人在移动过程中可以进行灵活转向;在驱动轮组及从动轮组处均设有减震器使得机器人有良好的地形