
四轮独立电驱动车辆再生制动稳定控制方法、装置及车辆.pdf

秀美****甜v


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮独立电驱动车辆再生制动稳定控制方法、装置及车辆.pdf
本发明提供了一种四轮独立电驱动车辆再生制动稳定控制方法、装置及车辆,涉及车辆技术领域。该四轮独立电驱动车辆再生制动稳定控制方法包括以下步骤:接收车辆实际行驶时的横摆角速度;计算车辆的理想横摆角速度;依据横摆角速度与理想横摆角速度得到再生制动抑制横摆附加力矩并将再生制动抑制横摆附加力矩施加到车辆的车轮。四轮独立电驱动车辆在轻度失稳ESC系统尚未介入时,通过上述四轮独立电驱动车辆再生制动稳定控制方法,从而提高再生制动稳定性,更加及时,提高了车辆的安全性。

用于电驱动车辆的再生制动控制装置.pdf
一种再生制动控制装置(10),其配备在具有车轮和用于驱动用于行驶的车轮的电动马达(24)的电驱动车辆上。提供操作单元(40),用于车辆的驾驶者选择在再生制动期间要通过电动马达(24)产生的制动力的大小。基于电驱动车辆的状态,判定单元(2209)判定经由操作单元(40)选择的选择制动力是否是可接受的。通知单元(2210)被构造成使得,在选择制动力通过判定单元(2208)被判定为是不可接受的情况下,通知单元(2208)向驾驶者提供对应通知。

车辆驱动装置的控制装置及车辆驱动装置的控制方法.pdf
本发明涉及一种用于车辆驱动装置的控制装置及控制方法。所述车辆驱动装置包括输出用于行驶的驱动力的驱动源(12)和具有多个变速档的自动变速器(16)。所述控制装置包括信号控制装置(20),所述信号控制装置在自动变速器的手动降档被执行时执行与加速器操作无关地改变所述驱动源的输出转矩的信号控制,并且基于在所述自动变速器的换档开始时涡轮转速的欠调量以学习方式改变执行下次信号控制的正时。
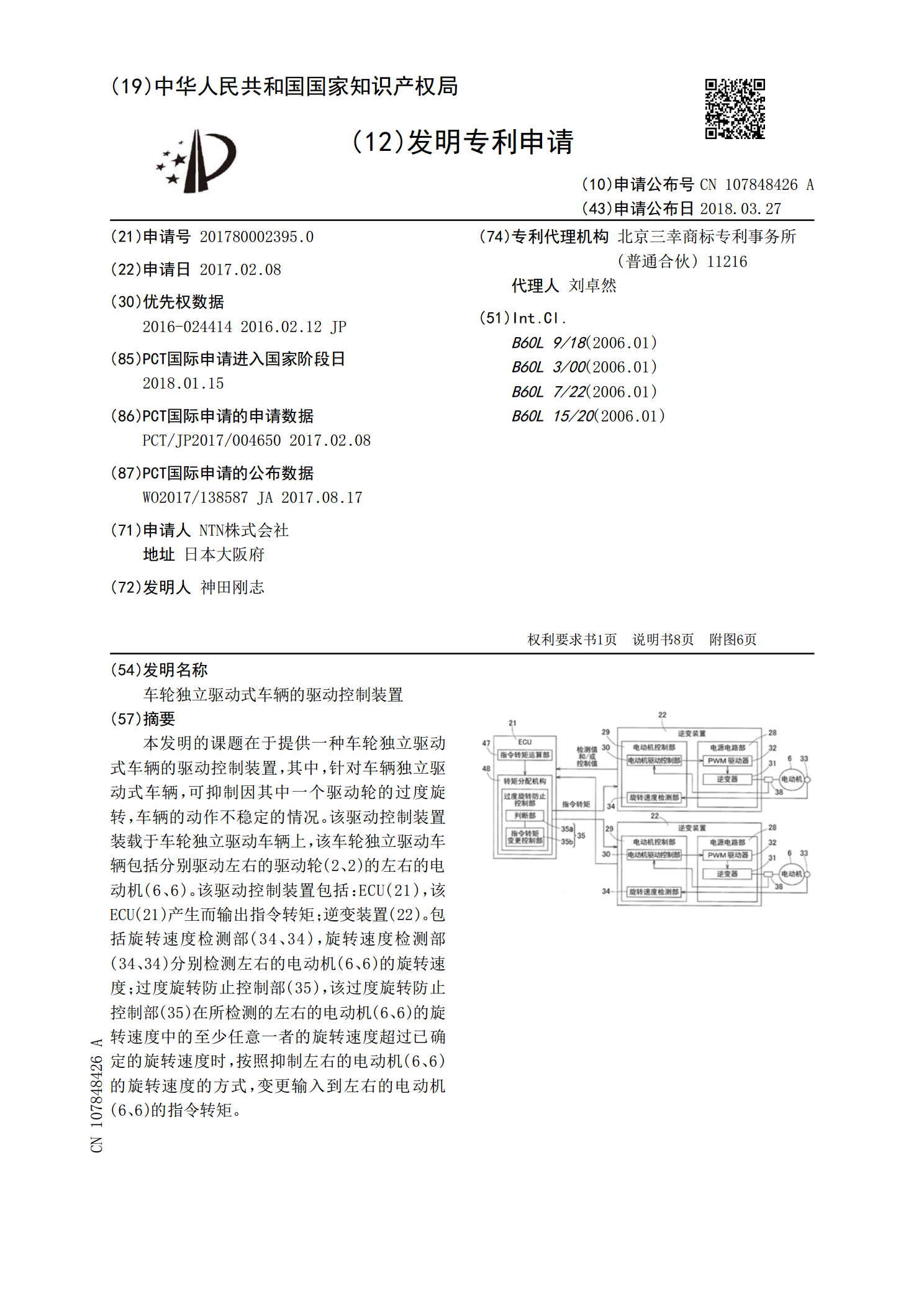
车轮独立驱动式车辆的驱动控制装置.pdf
本发明的课题在于提供一种车轮独立驱动式车辆的驱动控制装置,其中,针对车辆独立驱动式车辆,可抑制因其中一个驱动轮的过度旋转,车辆的动作不稳定的情况。该驱动控制装置装载于车轮独立驱动车辆上,该车轮独立驱动车辆包括分别驱动左右的驱动轮(2、2)的左右的电动机(6、6)。该驱动控制装置包括:ECU(21),该ECU(21)产生而输出指令转矩;逆变装置(22)。包括旋转速度检测部(34、34),旋转速度检测部(34、34)分别检测左右的电动机(6、6)的旋转速度;过度旋转防止控制部(35),该过度旋转防止控制部(3
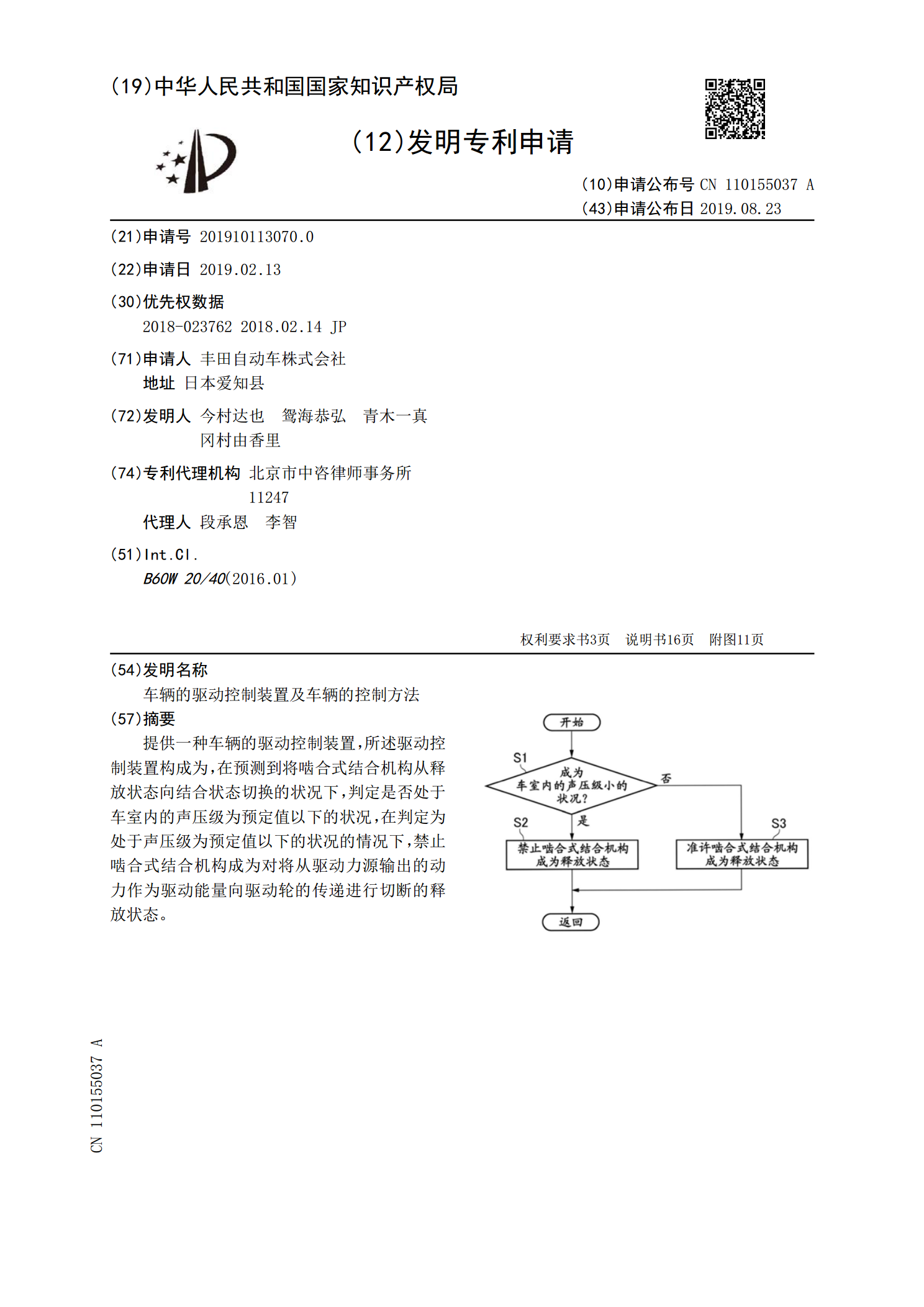
车辆的驱动控制装置及车辆的控制方法.pdf
提供一种车辆的驱动控制装置,所述驱动控制装置构成为,在预测到将啮合式结合机构从释放状态向结合状态切换的状况下,判定是否处于车室内的声压级为预定值以下的状况,在判定为处于声压级为预定值以下的状况的情况下,禁止啮合式结合机构成为对将从驱动力源输出的动力作为驱动能量向驱动轮的传递进行切断的释放状态。