
一种较灵活的滚轮式机器人移动.pdf

贤惠****66


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种较灵活的滚轮式机器人移动.pdf
本发明公开了一种较灵活的滚轮式机器人移动,包括放置箱、底座及转动台,所述底座设置在放置箱的顶部,并与放置箱通过螺丝固定连接,所述放置箱的底部四角安装有万向轮,该种较灵活的滚轮式机器人移动,与传统的机器人相比较,不仅可以实现移动,还可以实现水平方向的转动和竖直高度的调节,该机器人中的第二转动轴可以带动转动台实现360度无死角转动,设置在转动臂中的第一转动轴可以使转动臂在不同的高度工作,当机器人要经过狭小空间时,可以通过第二液压伸缩轴把连接板拉回至放置箱中,减小其体积,以便于通过,大大增加了机器人的工作范围,

一种轮式移动服务机器人.pdf
本发明的目的在于提供一种轮式移动服务机器人,包括底盘机构、机架、大臂机构、小臂机构、拉线电机组件,小臂机构连接大臂机构,大臂机构连接机架,拉线电机组件安装在机架里,机架固定在底盘机构上;所述的小臂机构包括手指、手指盒、钢丝绳、U型架、随动转盘、小臂蜗轮、小臂蜗杆、小臂外壳、小臂电机、腕外壳,手指安装在手指盒上,U型架安装在手指里,销钉安装在U型架上,钢丝绳一端固定在U型架里、另一端连接拉线电机组件,手指盒安装在随动转盘上,随动转盘在重力的作用下自动转动,随动转盘连接腕外壳,小臂电机、小臂蜗杆、小臂蜗轮安装
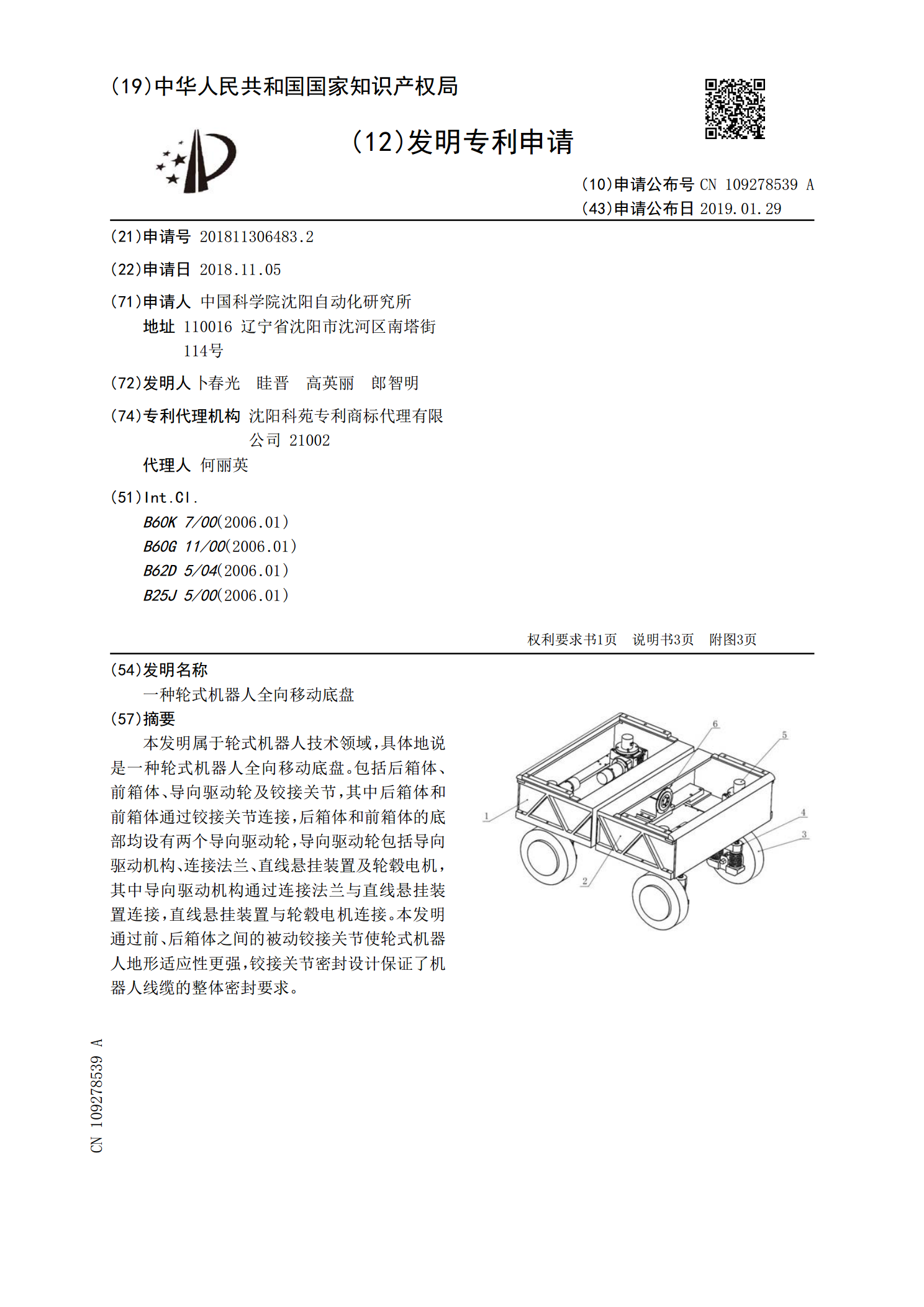
一种轮式机器人全向移动底盘.pdf
本发明属于轮式机器人技术领域,具体地说是一种轮式机器人全向移动底盘。包括后箱体、前箱体、导向驱动轮及铰接关节,其中后箱体和前箱体通过铰接关节连接,后箱体和前箱体的底部均设有两个导向驱动轮,导向驱动轮包括导向驱动机构、连接法兰、直线悬挂装置及轮毂电机,其中导向驱动机构通过连接法兰与直线悬挂装置连接,直线悬挂装置与轮毂电机连接。本发明通过前、后箱体之间的被动铰接关节使轮式机器人地形适应性更强,铰接关节密封设计保证了机器人线缆的整体密封要求。
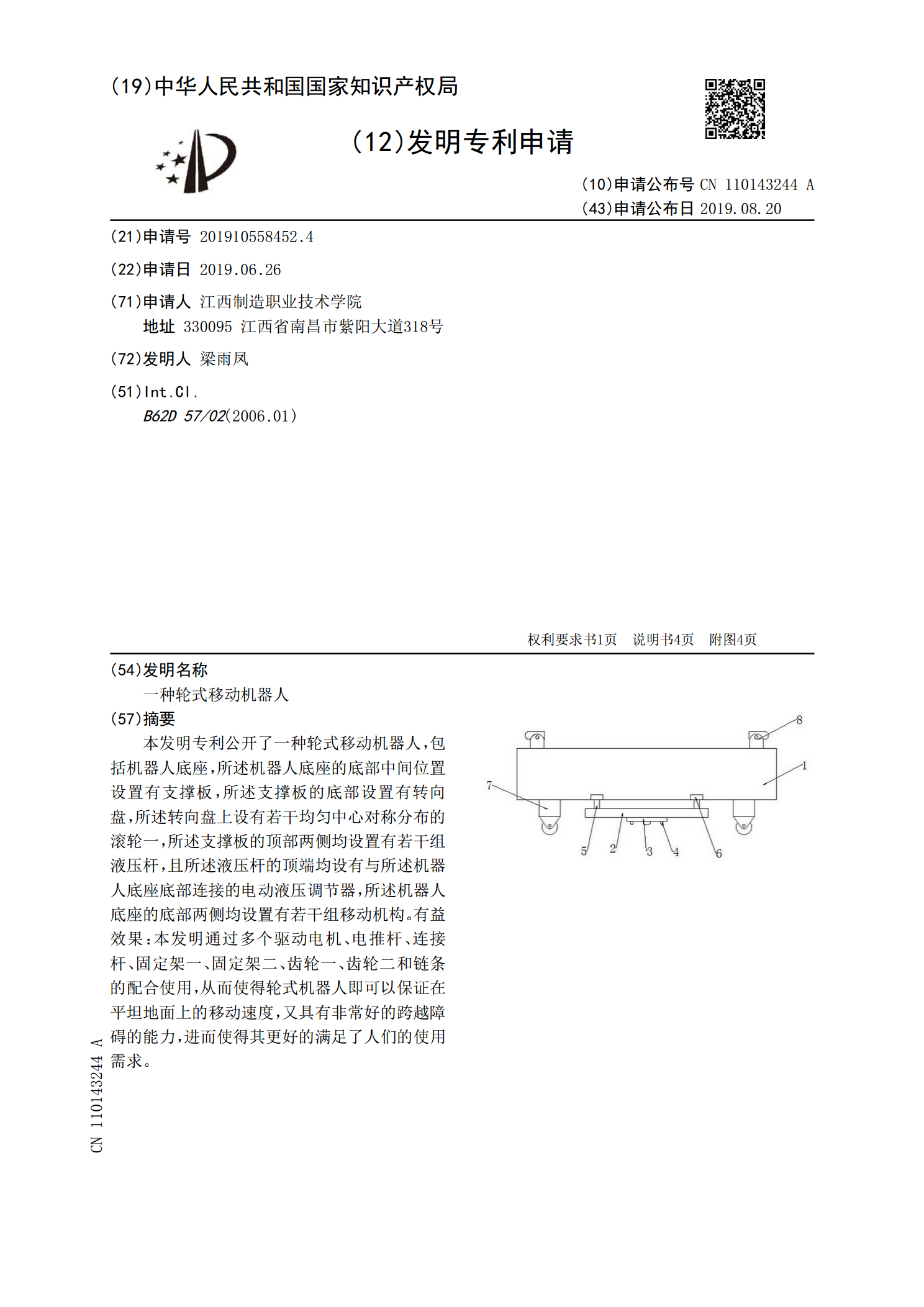
一种轮式移动机器人.pdf
本发明专利公开了一种轮式移动机器人,包括机器人底座,所述机器人底座的底部中间位置设置有支撑板,所述支撑板的底部设置有转向盘,所述转向盘上设有若干均匀中心对称分布的滚轮一,所述支撑板的顶部两侧均设置有若干组液压杆,且所述液压杆的顶端均设有与所述机器人底座底部连接的电动液压调节器,所述机器人底座的底部两侧均设置有若干组移动机构。有益效果:本发明通过多个驱动电机、电推杆、连接杆、固定架一、固定架二、齿轮一、齿轮二和链条的配合使用,从而使得轮式机器人即可以保证在平坦地面上的移动速度,又具有非常好的跨越障碍的能力,

轮式移动管道机器人.pdf
本发明公开了一种轮式移动管道机器人,包括:爬行器,包括密闭的箱体(17)、主动齿轮系、轮组(10,19,16);可根据不同管道内径的需要固定安装在爬行器上的升降云台(2);两自由度探测头(1),其可根据需要直接插拔于升降云台或爬行器上,从而实现对管道的全方位检测,提高工作效率。轮组包括小轮组与大轮组。小轮组(10,19)的单侧小轮之一为主动轮。大轮组包括侧桥板、快连接结构、大轮(16)。箱体内设置有与主动齿轮系连接的电机。本发明通过快速简捷无螺钉装卸匹配的大轮组与升降云台,来调节爬行器检测的径向尺寸,能够