
一种轮式移动机器人.pdf

和裕****az

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式移动机器人.pdf
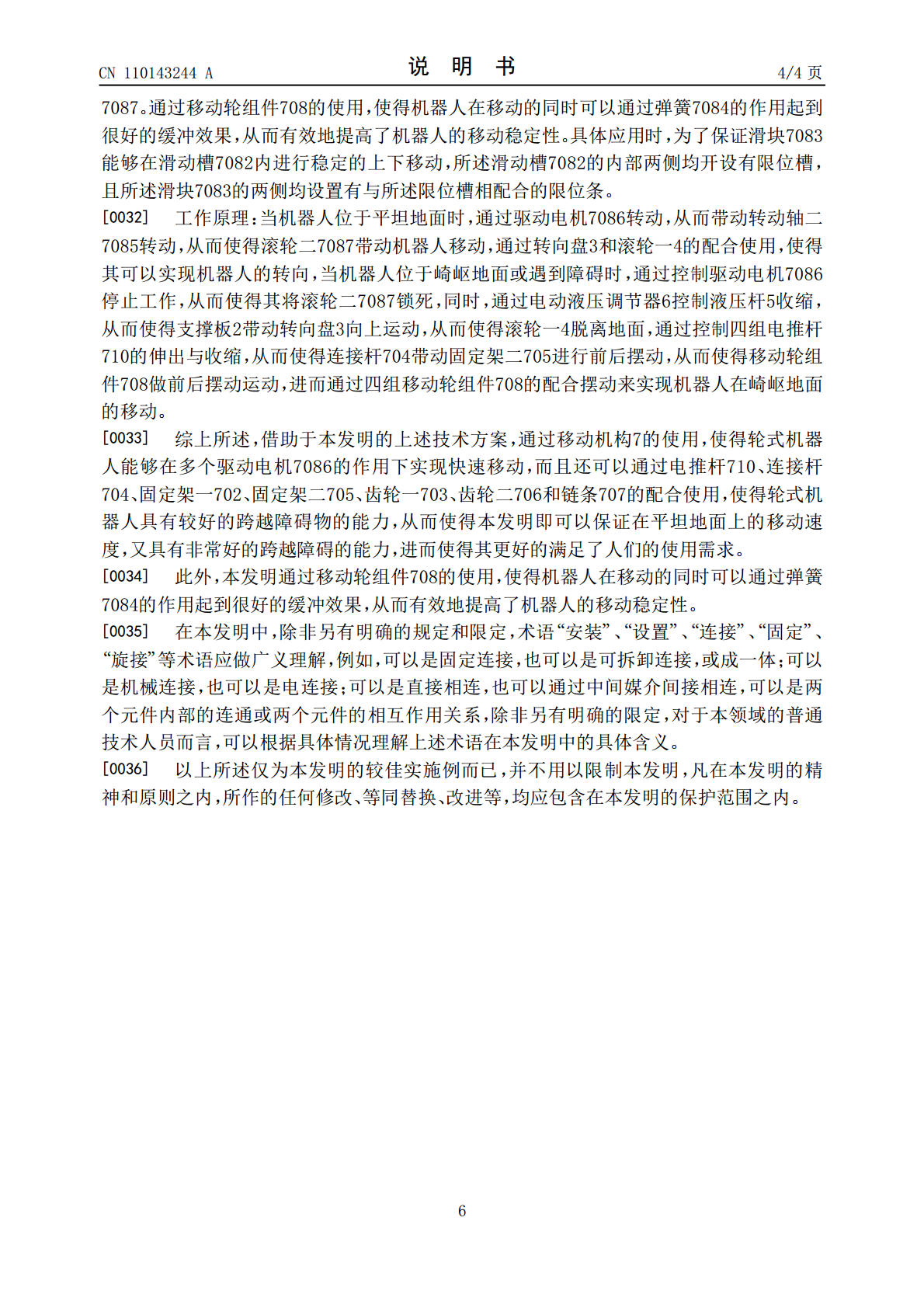
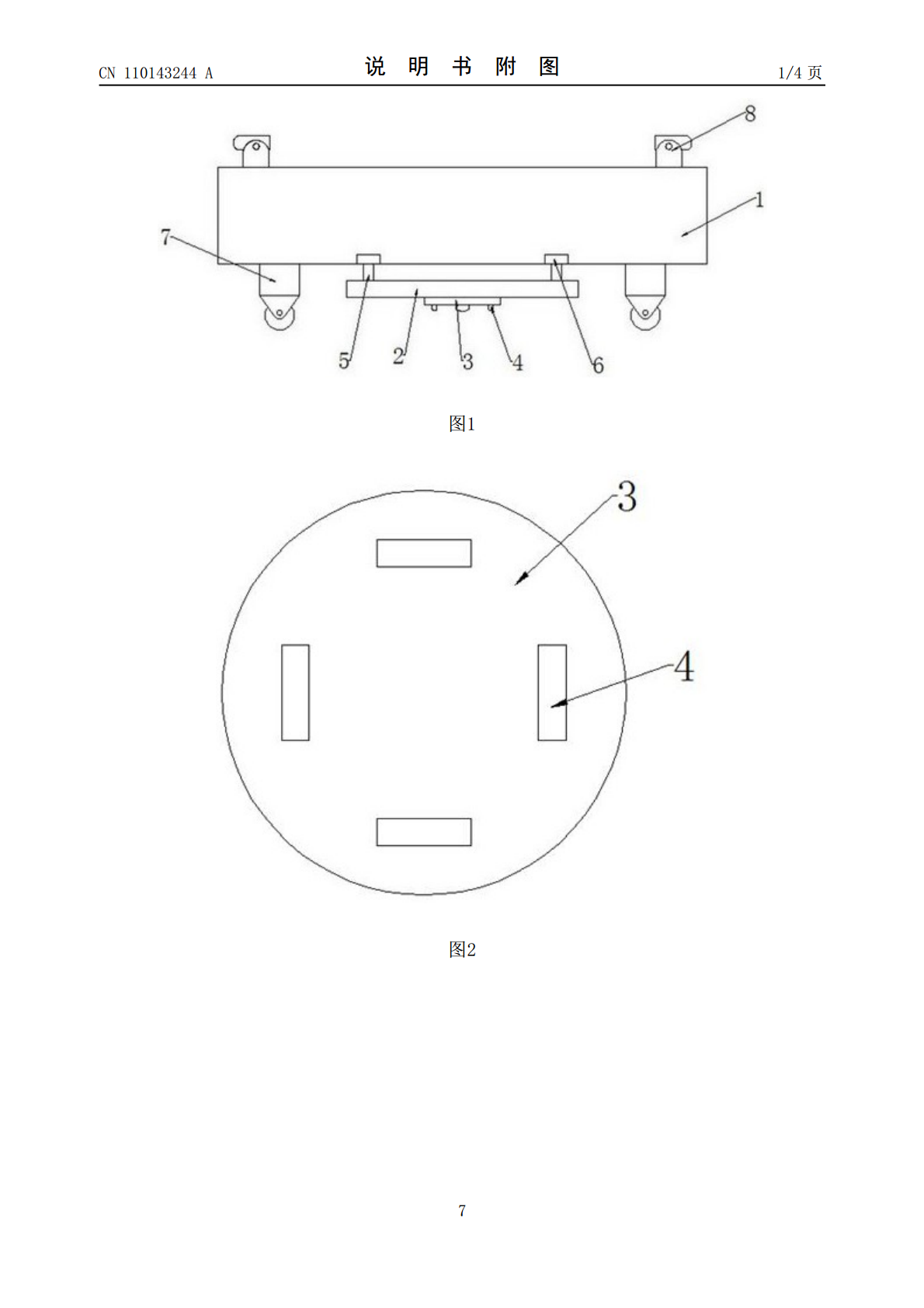
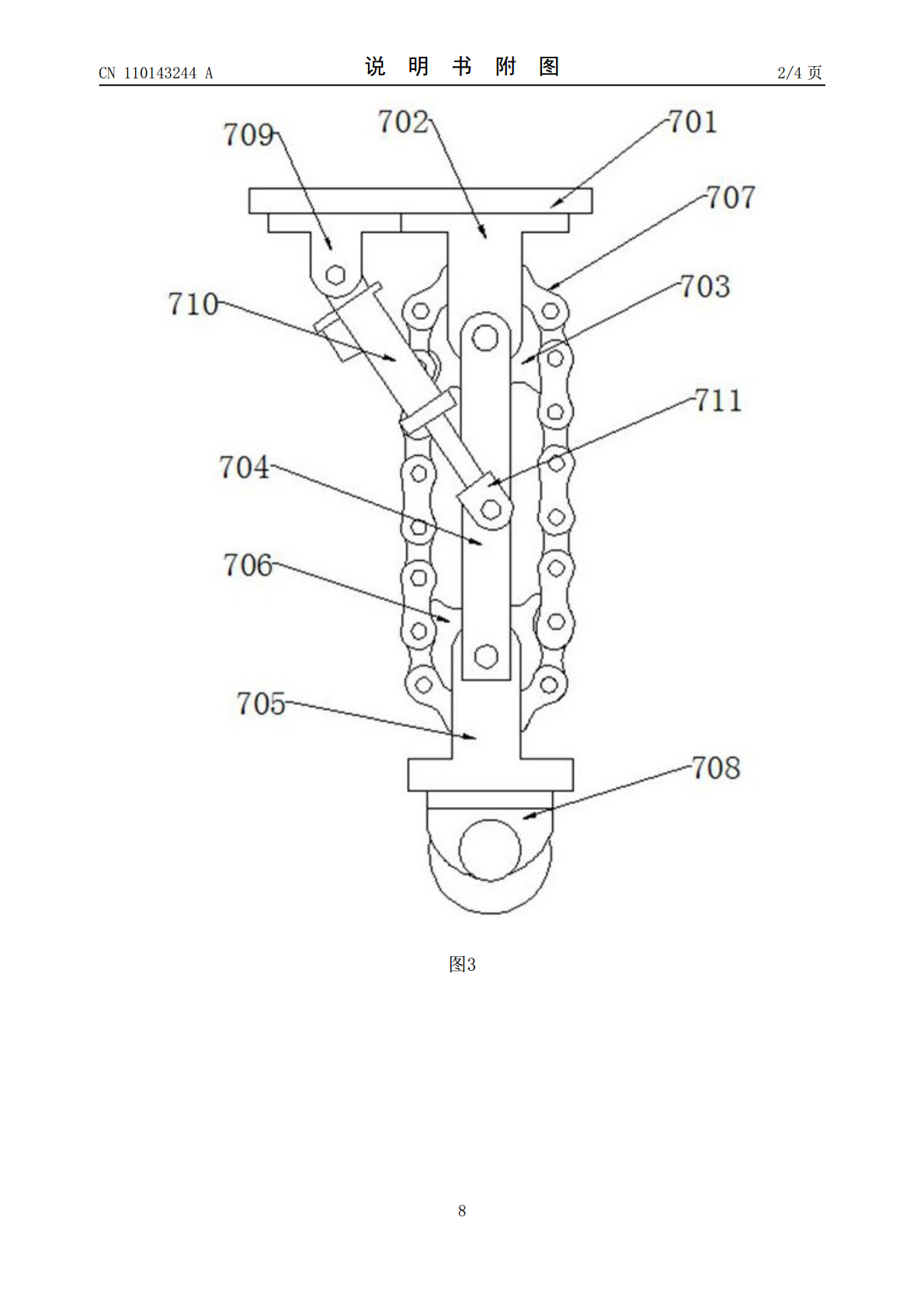
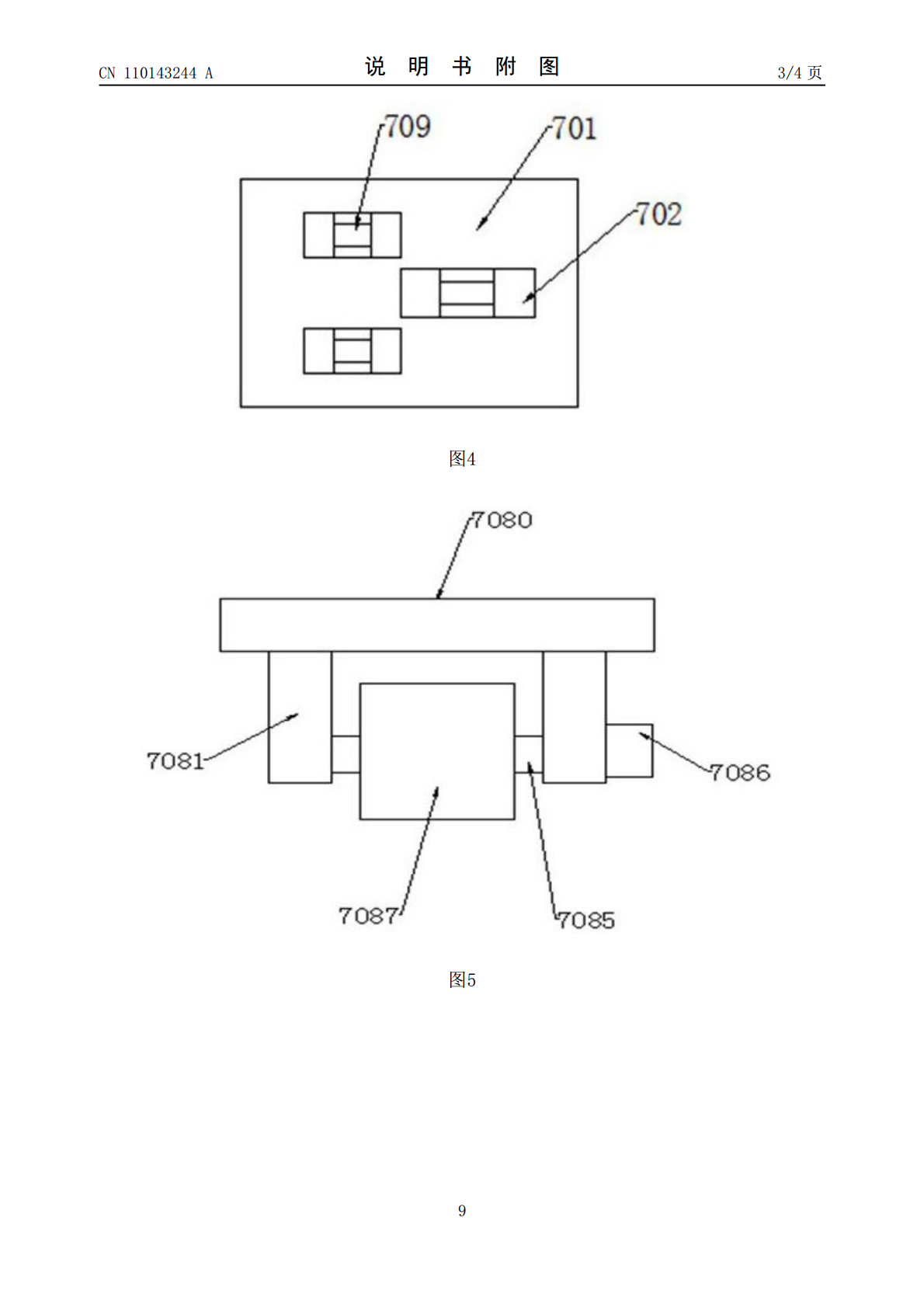
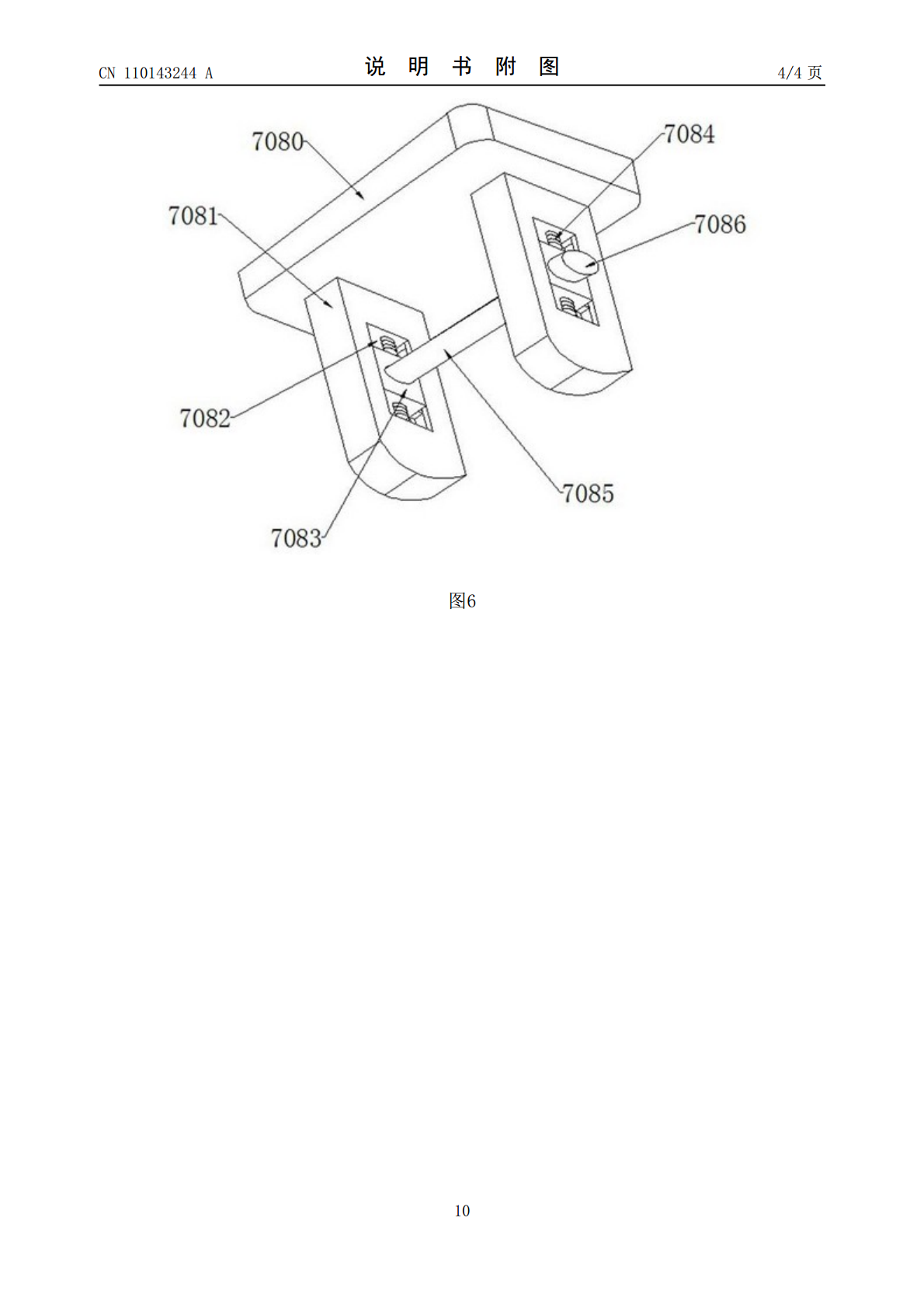
本发明专利公开了一种轮式移动机器人,包括机器人底座,所述机器人底座的底部中间位置设置有支撑板,所述支撑板的底部设置有转向盘,所述转向盘上设有若干均匀中心对称分布的滚轮一,所述支撑板的顶部两侧均设置有若干组液压杆,且所述液压杆的顶端均设有与所述机器人底座底部连接的电动液压调节器,所述机器人底座的底部两侧均设置有若干组移动机构。有益效果:本发明通过多个驱动电机、电推杆、连接杆、固定架一、固定架二、齿轮一、齿轮二和链条的配合使用,从而使得轮式机器人即可以保证在平坦地面上的移动速度,又具有非常好的跨越障碍的能力,
一种轮式自主移动机器人.pdf
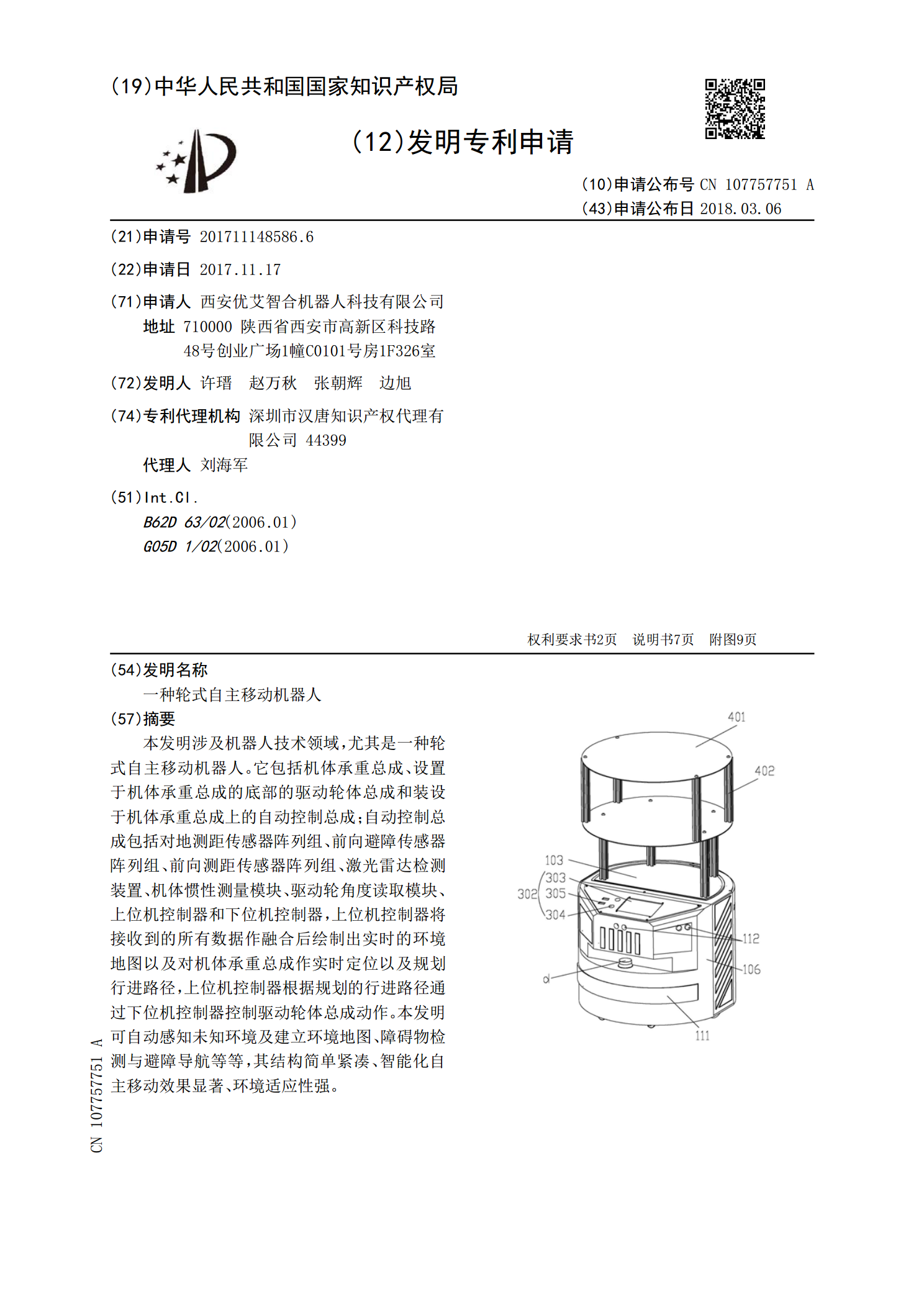
本发明涉及机器人技术领域,尤其是一种轮式自主移动机器人。它包括机体承重总成、设置于机体承重总成的底部的驱动轮体总成和装设于机体承重总成上的自动控制总成;自动控制总成包括对地测距传感器阵列组、前向避障传感器阵列组、前向测距传感器阵列组、激光雷达检测装置、机体惯性测量模块、驱动轮角度读取模块、上位机控制器和下位机控制器,上位机控制器将接收到的所有数据作融合后绘制出实时的环境地图以及对机体承重总成作实时定位以及规划行进路径,上位机控制器根据规划的行进路径通过下位机控制器控制驱动轮体总成动作。本发明可自动感知未知
一种轮式移动机器人控制方法.pdf
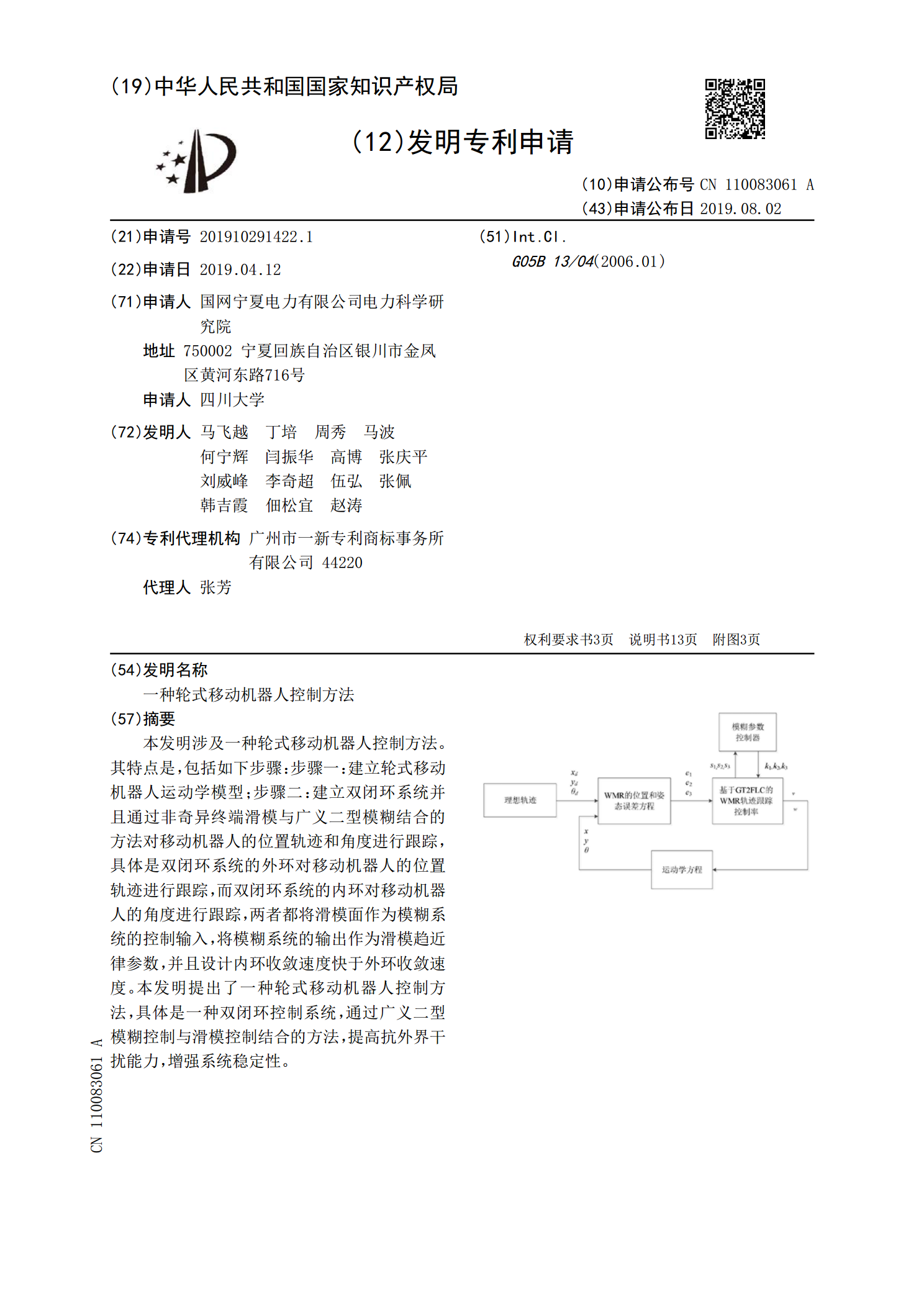
本发明涉及一种轮式移动机器人控制方法。其特点是,包括如下步骤:步骤一:建立轮式移动机器人运动学模型;步骤二:建立双闭环系统并且通过非奇异终端滑模与广义二型模糊结合的方法对移动机器人的位置轨迹和角度进行跟踪,具体是双闭环系统的外环对移动机器人的位置轨迹进行跟踪,而双闭环系统的内环对移动机器人的角度进行跟踪,两者都将滑模面作为模糊系统的控制输入,将模糊系统的输出作为滑模趋近律参数,并且设计内环收敛速度快于外环收敛速度。本发明提出了一种轮式移动机器人控制方法,具体是一种双闭环控制系统,通过广义二型模糊控制与滑模

一种全方位轮式移动机器人.pdf
本发明提供一种新型全方位轮式移动机器人,在机器人本体上安装有三个复合车轮,三个车轮两两之间呈120°均匀分布安装,且每轮轮心离移动机器人中心距离相等。每个复合车轮均可实现轴向旋转和零半径回转,旋转和回转分别由一个电机独立驱动,相互之间不存在干扰。三个车轮均为主动轮,通过调整车轮旋向,可实现平面内任意方向行走。本发明结构简单、制造容易、控制精度高、易于推广、非常适合在空间狭窄、对机器人的机动性要求高的场合,可作为工厂生产流水线移动运输装置,也可作为生活服务、娱乐设施,更可代替人力在各种危险场所使用。

一种轮式移动机器人悬挂装置.pdf
本发明公开了一种轮式移动机器人悬挂装置,其特征在于,包括:底盘(1),所述底盘(1)中部开有用于穿过车轮(15)的第一通孔,所述第一通孔前端的所述底盘(1)上固定设置有弹簧导杆固定座(2),所述第一通孔后端的所述底盘(1)上固定设置有支撑座(6)。本发明提供的一种轮式移动机器人悬挂装置,能够保证驱动轮始终着地,提高机器人底盘的地面适应能力,防止驱动轮被从动轮架空,出现驱动轮空转或打滑的现象,影响机器人运动,同时可以有效缓解机器人的车轮在路面上运动时传递给机器人底盘的振动,并且结构简单,控制方便。