
用于控制主动悬架系统的阻尼器的系统和方法.pdf

宛菡****魔王


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制主动悬架系统的阻尼器的系统和方法.pdf
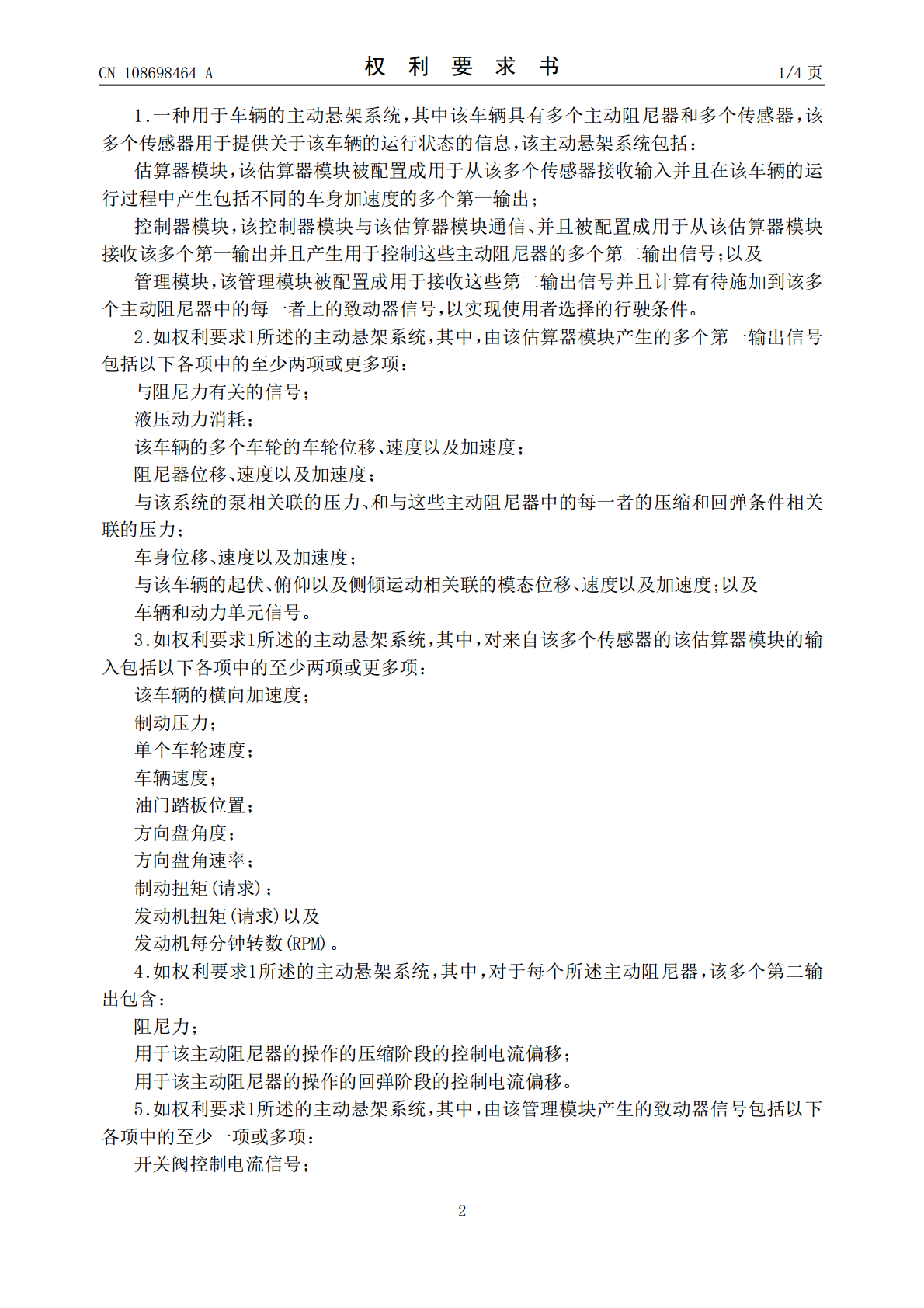
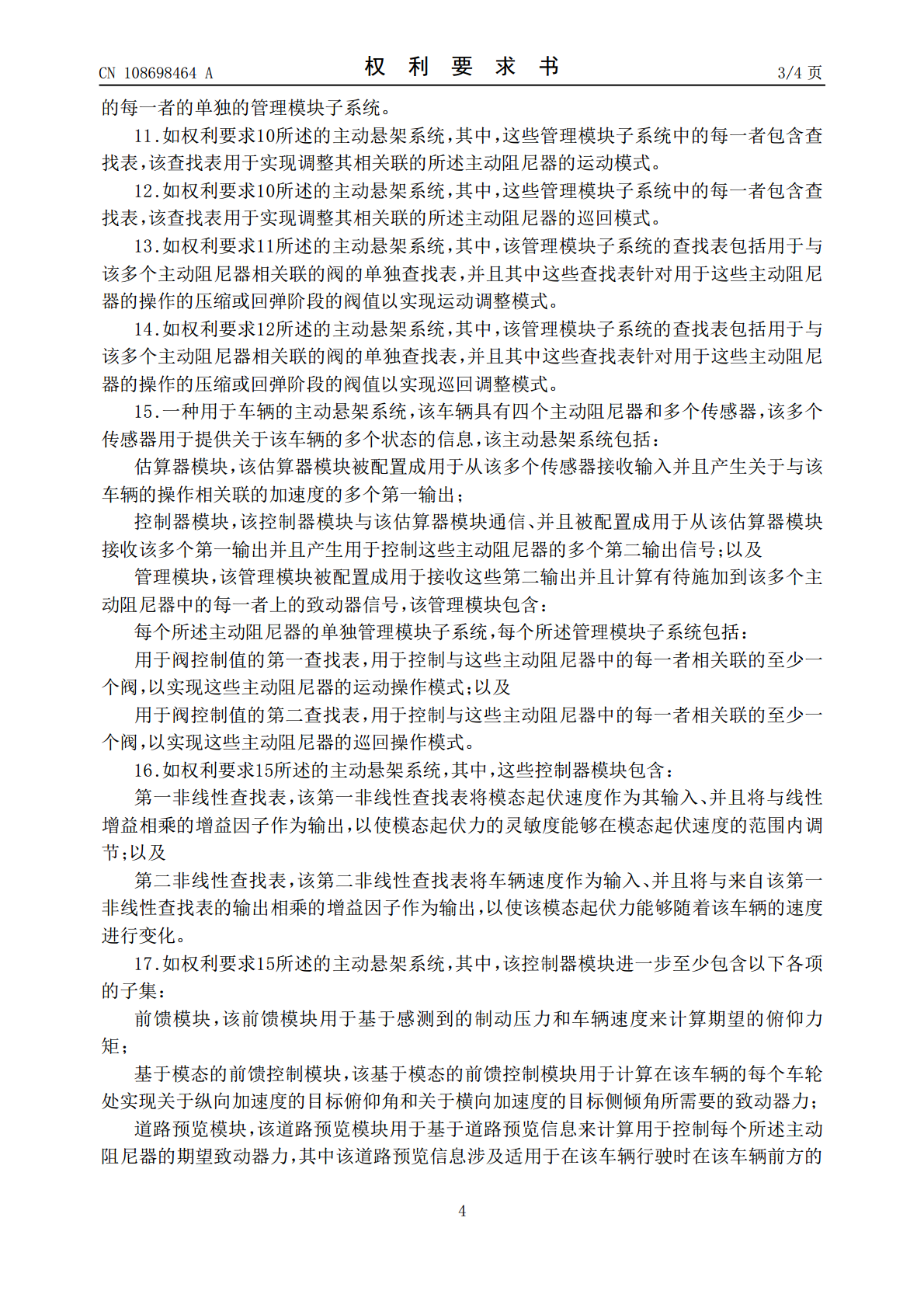
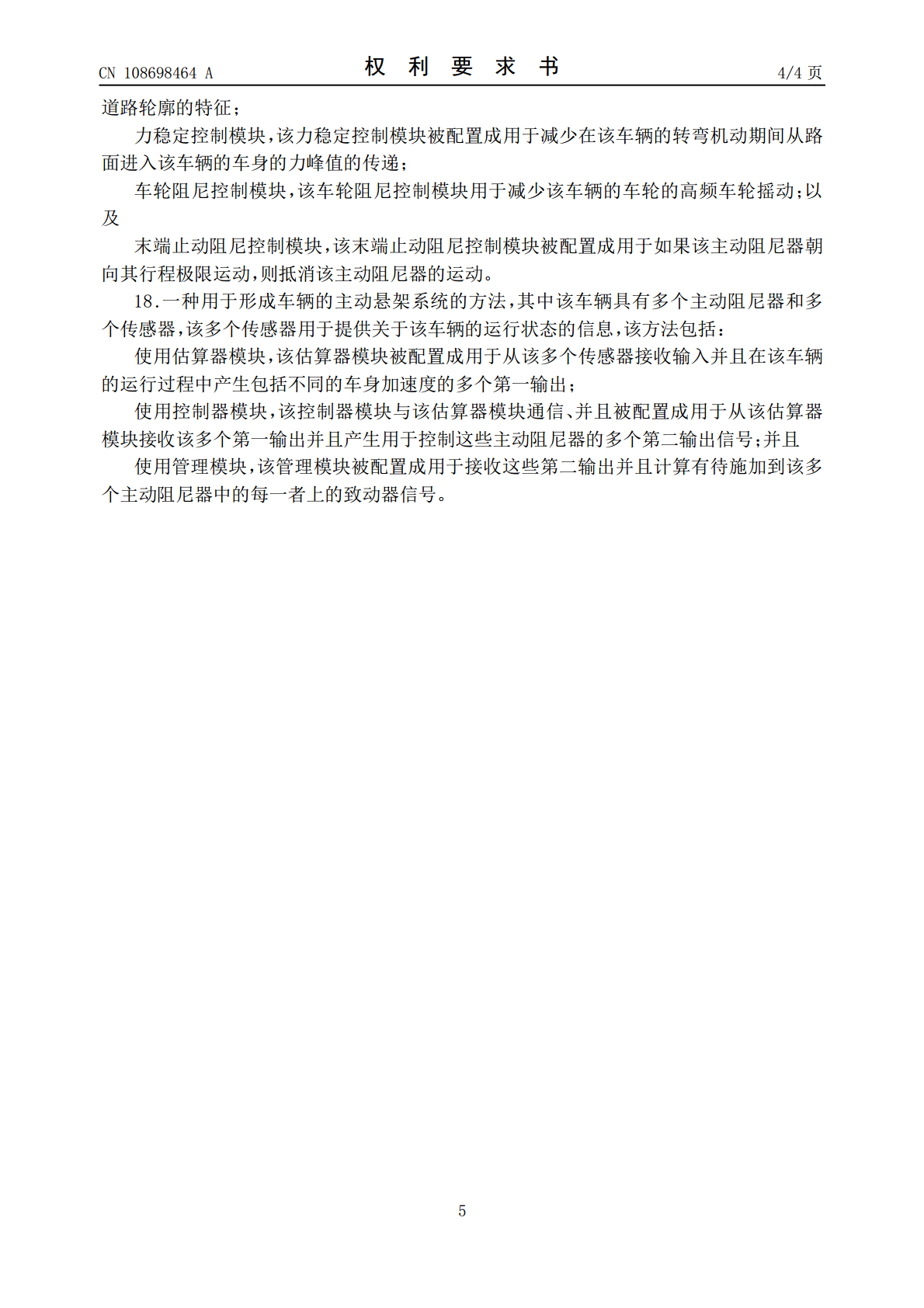
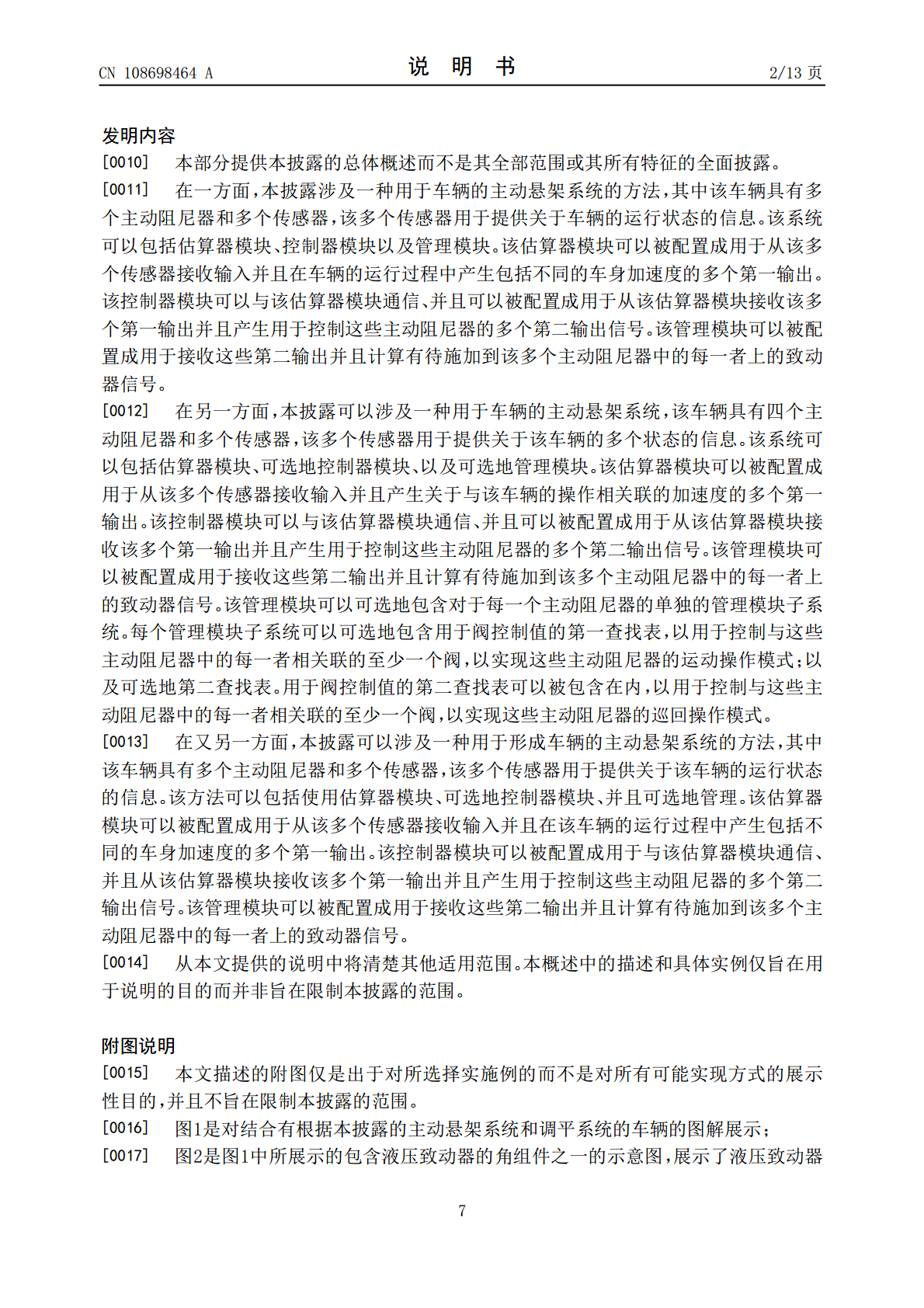
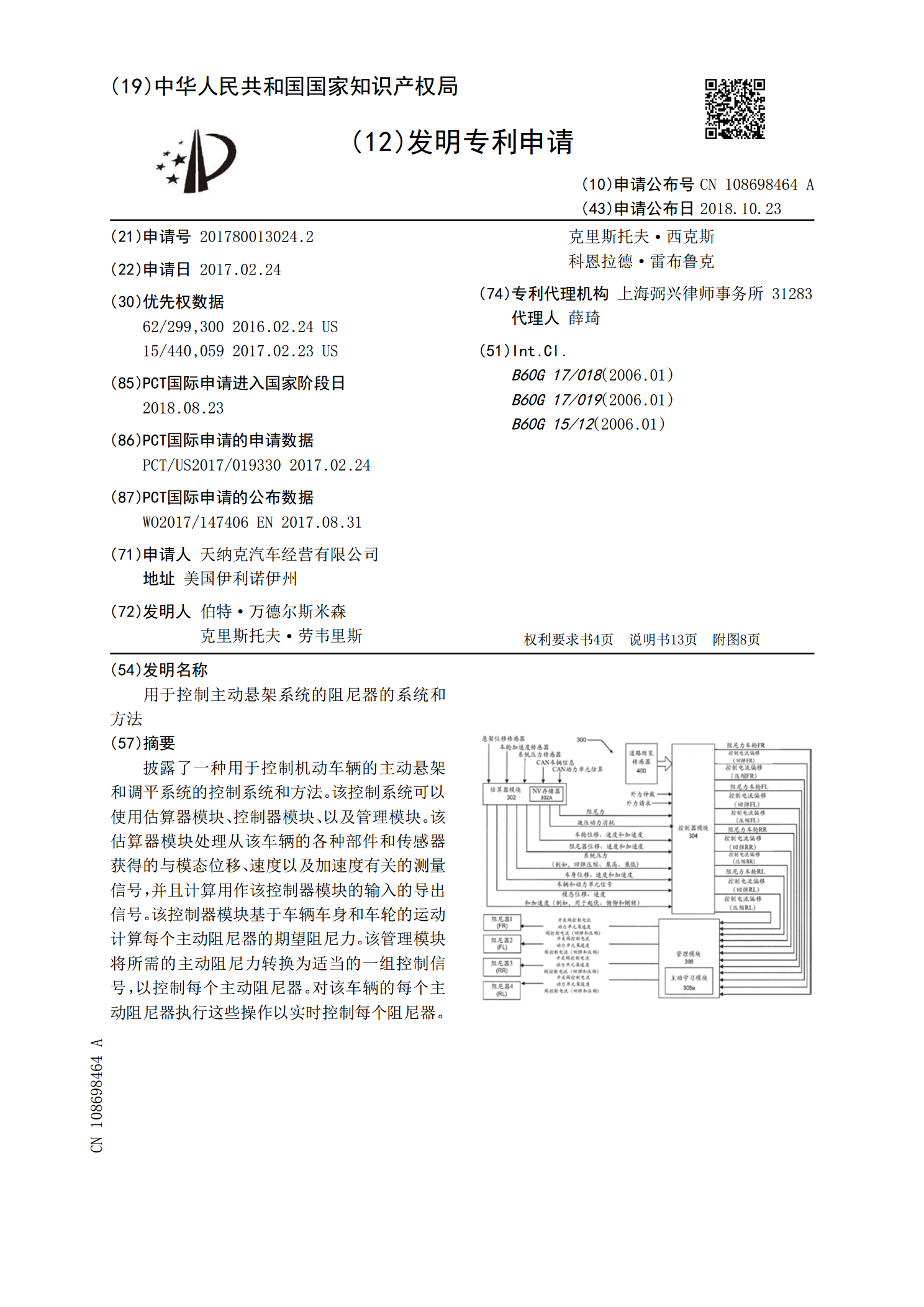
披露了一种用于控制机动车辆的主动悬架和调平系统的控制系统和方法。该控制系统可以使用估算器模块、控制器模块、以及管理模块。该估算器模块处理从该车辆的各种部件和传感器获得的与模态位移、速度以及加速度有关的测量信号,并且计算用作该控制器模块的输入的导出信号。该控制器模块基于车辆车身和车轮的运动计算每个主动阻尼器的期望阻尼力。该管理模块将所需的主动阻尼力转换为适当的一组控制信号,以控制每个主动阻尼器。对该车辆的每个主动阻尼器执行这些操作以实时控制每个阻尼器。

用于车辆的可变阻尼半主动悬架系统的控制方法.pdf
本公开描述了一种用于车辆的可变阻尼半主动悬架系统的控制方法,其包括以下步骤:测得车辆的簧上质量加速度、簧下质量加速度、悬架变形、以及轮胎变形四种目标响应信号;以离散型状态空间方程形式建立可变阻尼半主动悬架的系统模型,基于模型预测控制算法建立系统模型中的关于四种目标响应信号的四种控制方案;基于人工蜂群算法分别获得四种控制方案中的参数矩阵的最优解;求得四种目标响应信号的归一化响应信号,并对四种归一化响应信号进行比较,以动态选择出四种控制方案中的最优控制方案并对车辆施加控制。由此,能够显著提升对车辆的控制效果,
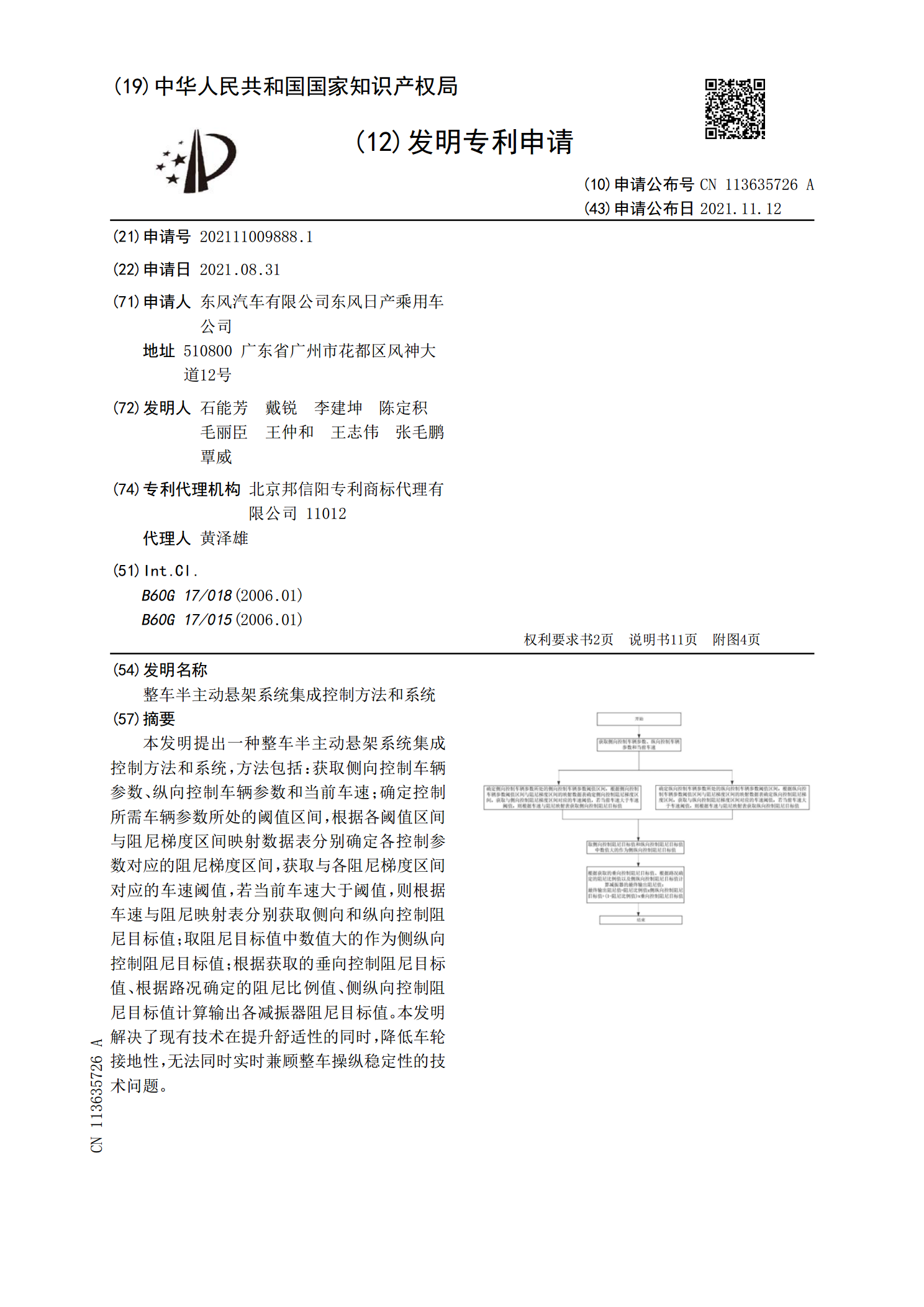
整车半主动悬架系统集成控制方法和系统.pdf
本发明提出一种整车半主动悬架系统集成控制方法和系统,方法包括:获取侧向控制车辆参数、纵向控制车辆参数和当前车速;确定控制所需车辆参数所处的阈值区间,根据各阈值区间与阻尼梯度区间映射数据表分别确定各控制参数对应的阻尼梯度区间,获取与各阻尼梯度区间对应的车速阈值,若当前车速大于阈值,则根据车速与阻尼映射表分别获取侧向和纵向控制阻尼目标值;取阻尼目标值中数值大的作为侧纵向控制阻尼目标值;根据获取的垂向控制阻尼目标值、根据路况确定的阻尼比例值、侧纵向控制阻尼目标值计算输出各减振器阻尼目标值。本发明解决了现有技术在
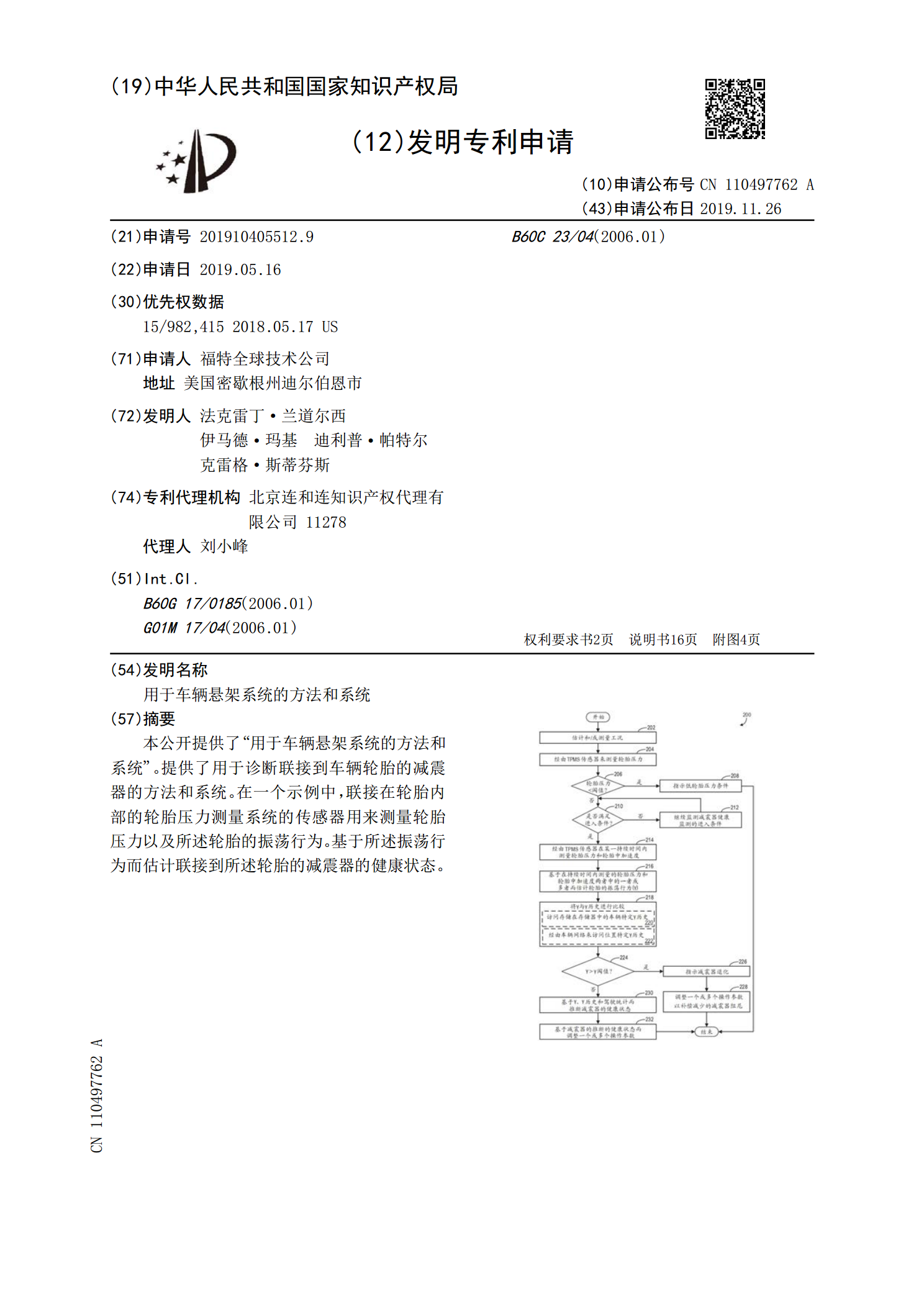
用于车辆悬架系统的方法和系统.pdf
本公开提供了“用于车辆悬架系统的方法和系统”。提供了用于诊断联接到车辆轮胎的减震器的方法和系统。在一个示例中,联接在轮胎内部的轮胎压力测量系统的传感器用来测量轮胎压力以及所述轮胎的振荡行为。基于所述振荡行为而估计联接到所述轮胎的减震器的健康状态。

主动几何控制悬架系统.pdf
本发明公开了一种主动几何控制悬架系统,其可以包括上臂和辅助连杆,所述上臂连接至后轮侧转向节和副车架之上和之间的一侧,所述辅助连杆与节点可变单元一起连接至所述转向节和所述副车架之上和之间的另一侧,其中所述节点可变单元包括:外壳,所述外壳形成在所述副车架的一部分处;轨迹可变套件,所述轨迹可变套件可拆卸地联接至所述外壳的支架;凸轮操作轨道,所述凸轮操作轨道固定至所述轨迹可变套件的一侧;凸轮,所述凸轮设置于所述轨迹可变套件的凸轮操作轨道上,从而沿着凸轮操作轨道能够上/下滑动;以及凸轮螺栓,所述凸轮螺栓将所述凸轮与