
整车半主动悬架系统集成控制方法和系统.pdf

Ch****49

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
整车半主动悬架系统集成控制方法和系统.pdf
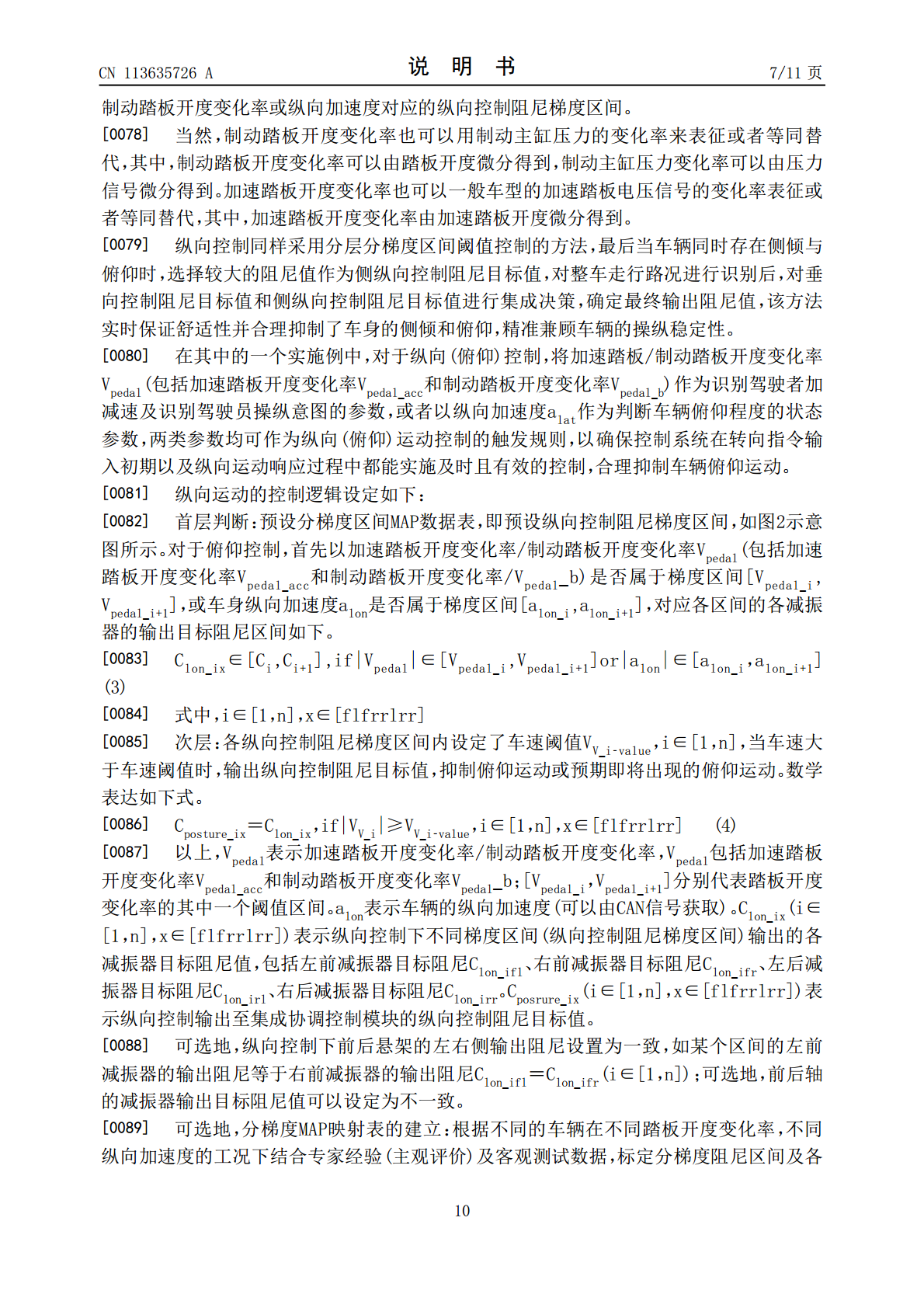
本发明提出一种整车半主动悬架系统集成控制方法和系统,方法包括:获取侧向控制车辆参数、纵向控制车辆参数和当前车速;确定控制所需车辆参数所处的阈值区间,根据各阈值区间与阻尼梯度区间映射数据表分别确定各控制参数对应的阻尼梯度区间,获取与各阻尼梯度区间对应的车速阈值,若当前车速大于阈值,则根据车速与阻尼映射表分别获取侧向和纵向控制阻尼目标值;取阻尼目标值中数值大的作为侧纵向控制阻尼目标值;根据获取的垂向控制阻尼目标值、根据路况确定的阻尼比例值、侧纵向控制阻尼目标值计算输出各减振器阻尼目标值。本发明解决了现有技术在

整车半主动悬架的控制与仿真的任务书.docx
整车半主动悬架的控制与仿真的任务书任务书设计:一、问题描述整车半主动悬架是一种具有较高控制性能和综合性能的悬架,广泛应用于汽车工业中。本次任务的目的是设计一个整车半主动悬架的控制系统,并进行仿真运算,以验证控制系统的性能。二、任务要求1.根据半主动悬架的构造和原理,设计半主动悬架的控制系统。控制系统应包括:(1)半主动悬架的数学模型(2)控制算法(3)控制器硬件系统的设计。2.设计完整的仿真实验平台。3.设计一种有效的控制器设计方法,并用试验验证其正确性。例如,控制器的设计和实验确定一种最优的控制器参数。

汽车半主动悬架系统的频域控制方法.pdf
本发明公开了一种汽车半主动悬架系统的频域控制方法,包括:测车身垂直加速度通过车身垂直加速度求车身垂直加速度变化率和车身垂直速度计算第一、第三、第五不动点所分别对应的频率值f1、f3、f5;令fc分别取f1、f3、f5,计算判定振动频率f所属频段范围,从而设置减振器的阻尼系数取值。本发明以车身垂直加速度、车轮动载荷、悬架动挠度的频域传递特性为基础,可自适应地判别悬架系统振动所属频段范围,从而施加相应的阻尼,在整个频域上都能达到较好的控制性能,显著地提高车辆的悬架性能。
磁流变半主动悬架的控制方法、装置及系统.pdf
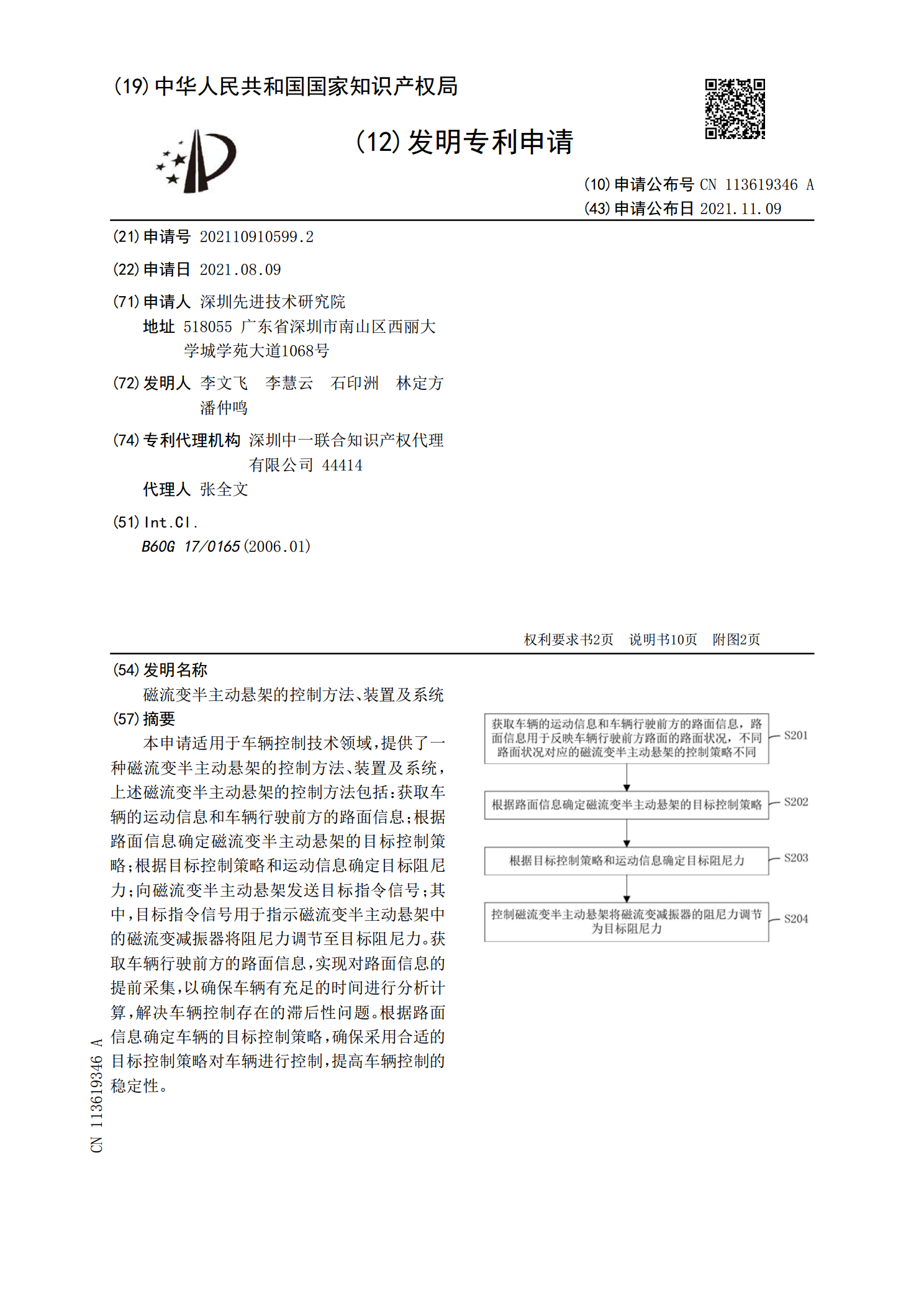
本申请适用于车辆控制技术领域,提供了一种磁流变半主动悬架的控制方法、装置及系统,上述磁流变半主动悬架的控制方法包括:获取车辆的运动信息和车辆行驶前方的路面信息;根据路面信息确定磁流变半主动悬架的目标控制策略;根据目标控制策略和运动信息确定目标阻尼力;向磁流变半主动悬架发送目标指令信号;其中,目标指令信号用于指示磁流变半主动悬架中的磁流变减振器将阻尼力调节至目标阻尼力。获取车辆行驶前方的路面信息,实现对路面信息的提前采集,以确保车辆有充足的时间进行分析计算,解决车辆控制存在的滞后性问题。根据路面信息确定车辆
一种汽车半主动悬架系统的智能控制方法.pdf
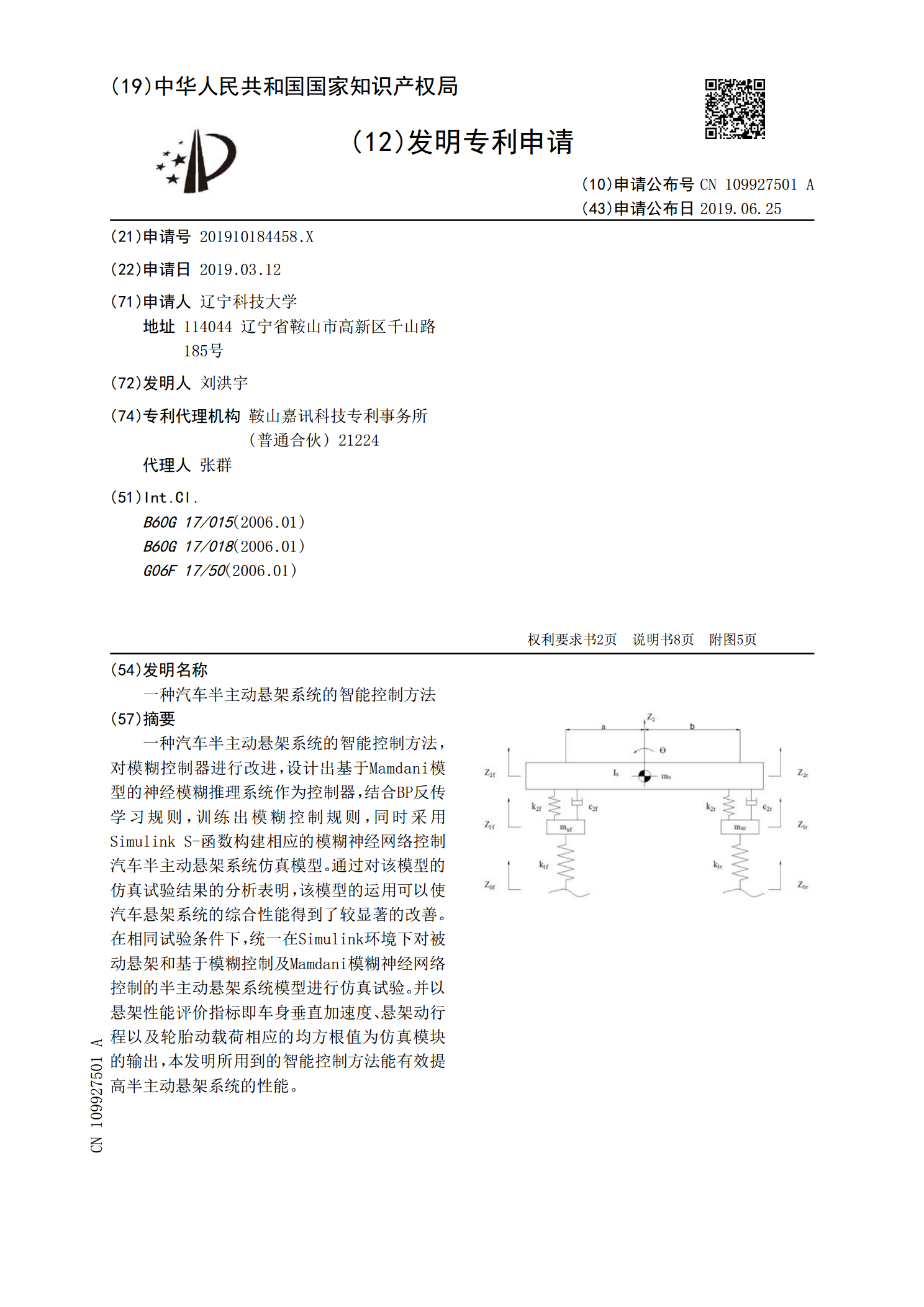
一种汽车半主动悬架系统的智能控制方法,对模糊控制器进行改进,设计出基于Mamdani模型的神经模糊推理系统作为控制器,结合BP反传学习规则,训练出模糊控制规则,同时采用SimulinkS‑函数构建相应的模糊神经网络控制汽车半主动悬架系统仿真模型。通过对该模型的仿真试验结果的分析表明,该模型的运用可以使汽车悬架系统的综合性能得到了较显著的改善。在相同试验条件下,统一在Simulink环境下对被动悬架和基于模糊控制及Mamdani模糊神经网络控制的半主动悬架系统模型进行仿真试验。并以悬架性能评价指标即车身垂