
一种墙面施工机械臂装置.pdf

佳宁****么啦


1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种墙面施工机械臂装置.pdf
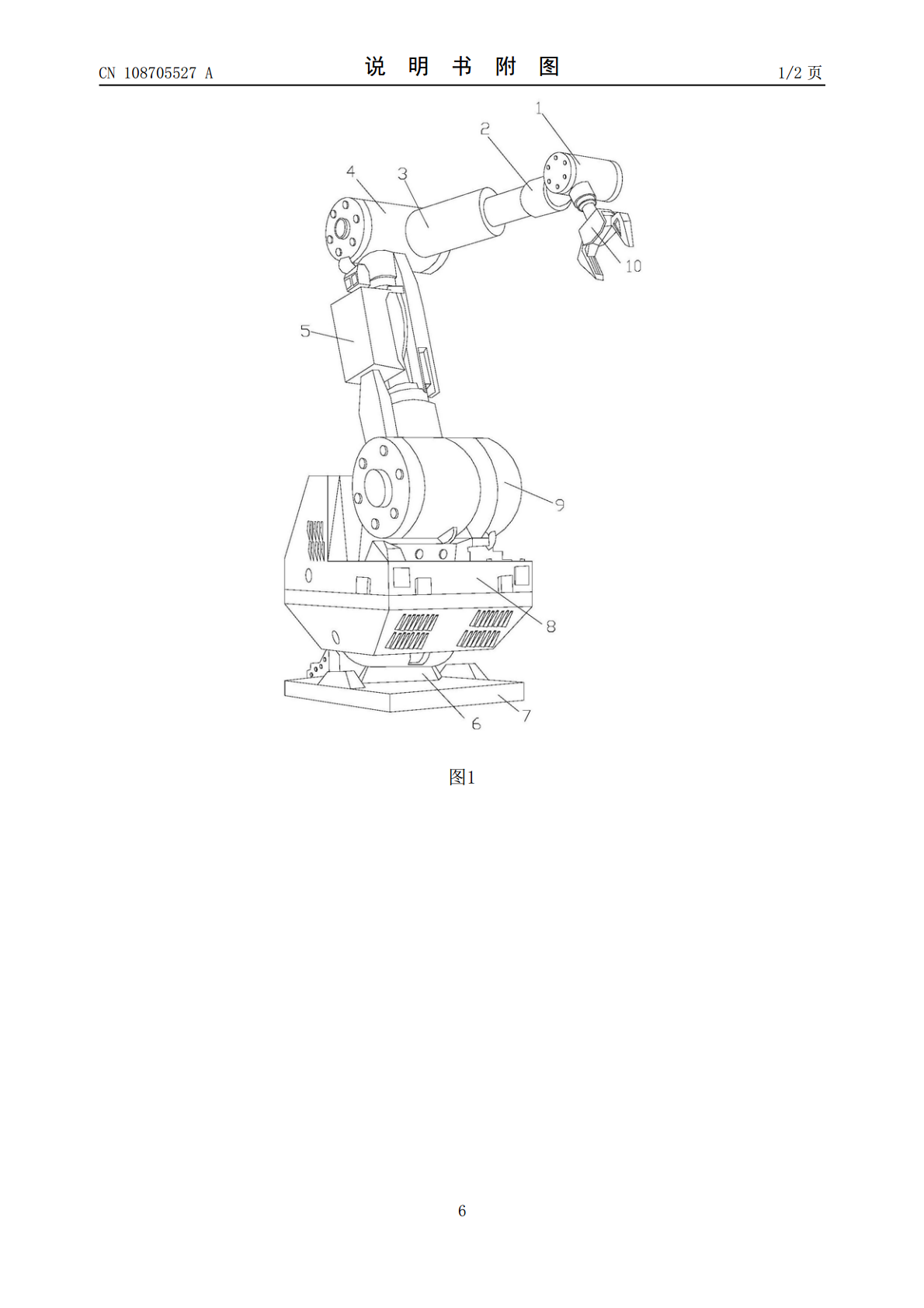
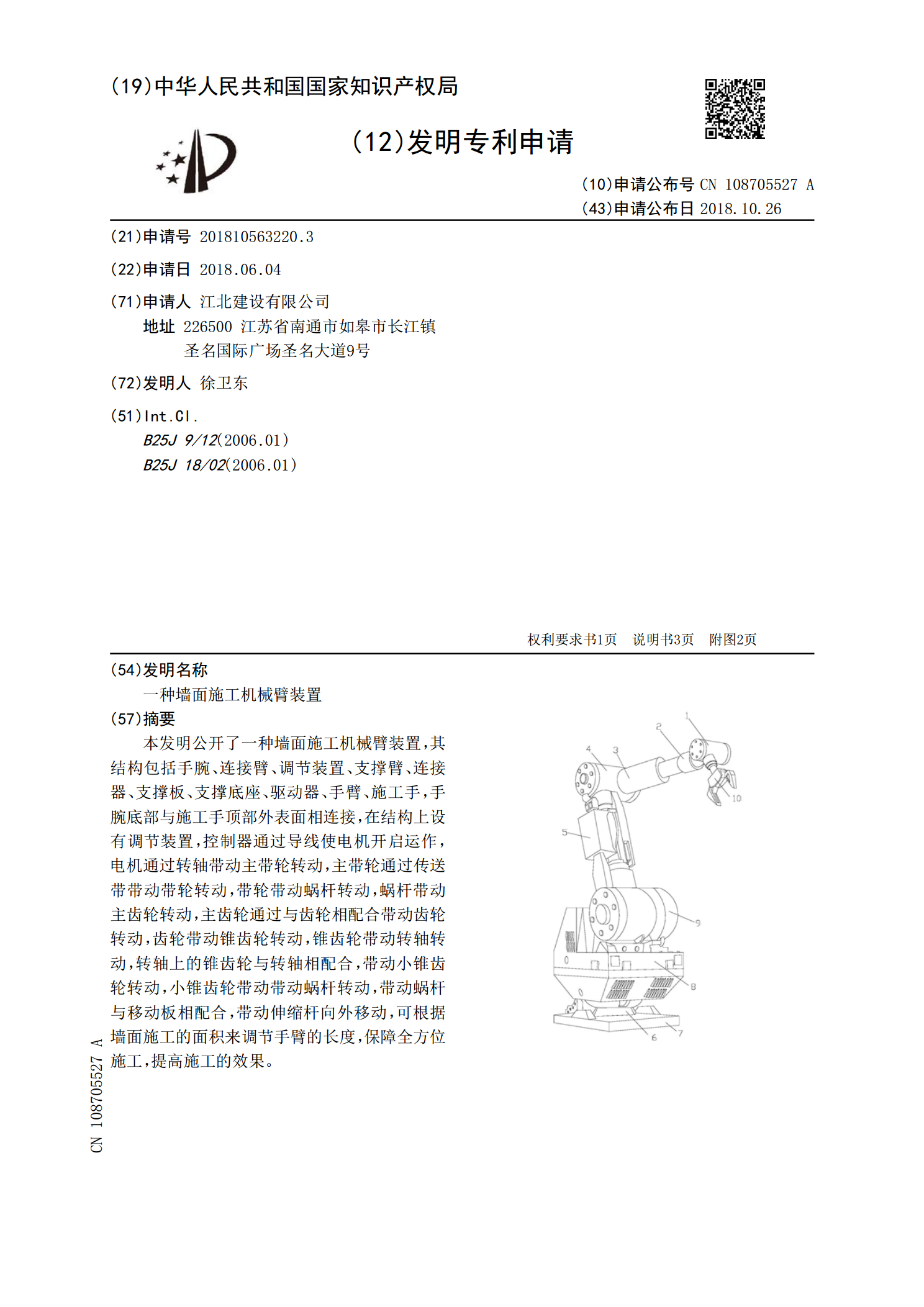
本发明公开了一种墙面施工机械臂装置,其结构包括手腕、连接臂、调节装置、支撑臂、连接器、支撑板、支撑底座、驱动器、手臂、施工手,手腕底部与施工手顶部外表面相连接,在结构上设有调节装置,控制器通过导线使电机开启运作,电机通过转轴带动主带轮转动,主带轮通过传送带带动带轮转动,带轮带动蜗杆转动,蜗杆带动主齿轮转动,主齿轮通过与齿轮相配合带动齿轮转动,齿轮带动锥齿轮转动,锥齿轮带动转轴转动,转轴上的锥齿轮与转轴相配合,带动小锥齿轮转动,小锥齿轮带动带动蜗杆转动,带动蜗杆与移动板相配合,带动伸缩杆向外移动,可根据墙面
一种用于墙面清洁的机械臂.pdf
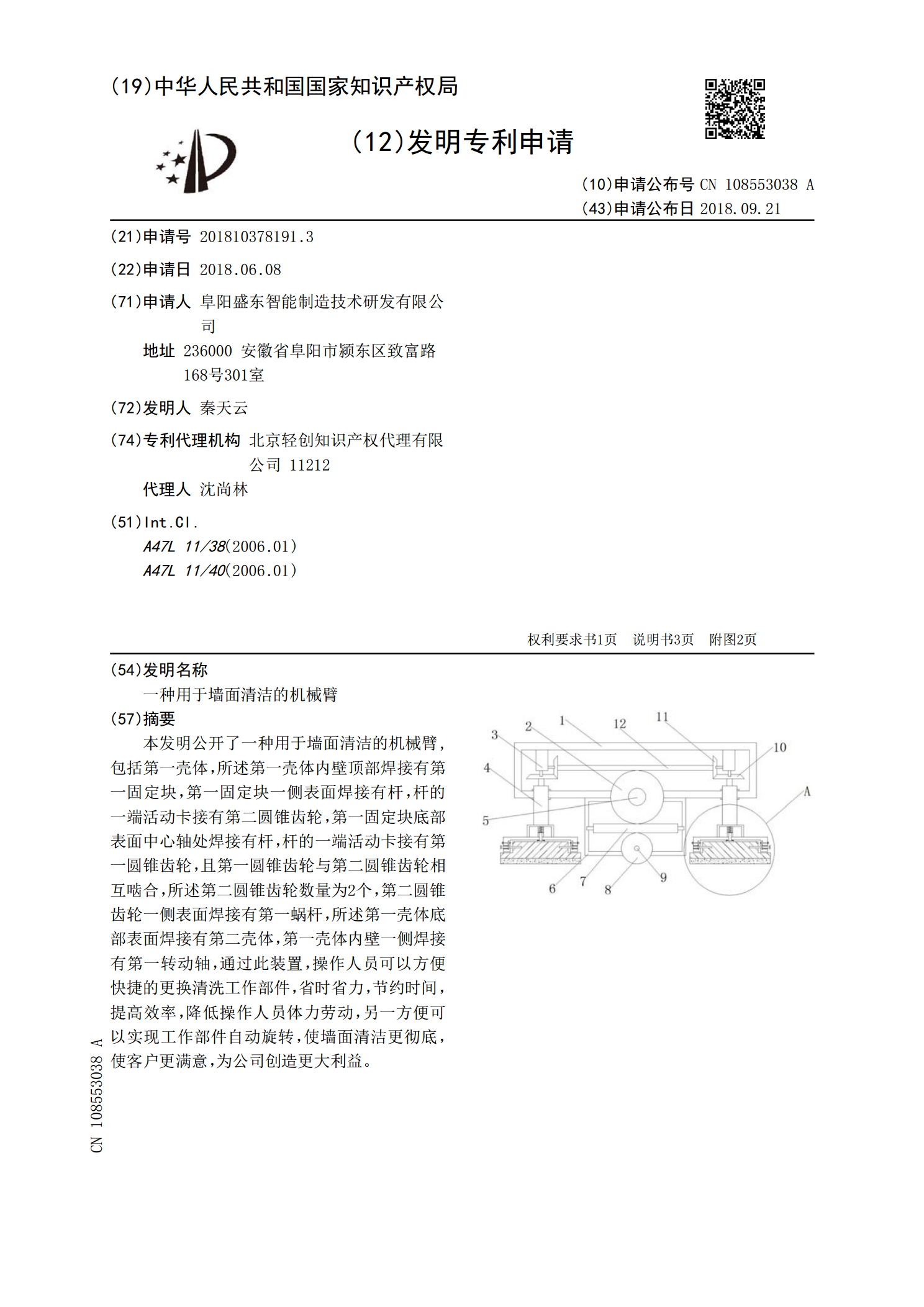
本发明公开了一种用于墙面清洁的机械臂,包括第一壳体,所述第一壳体内壁顶部焊接有第一固定块,第一固定块一侧表面焊接有杆,杆的一端活动卡接有第二圆锥齿轮,第一固定块底部表面中心轴处焊接有杆,杆的一端活动卡接有第一圆锥齿轮,且第一圆锥齿轮与第二圆锥齿轮相互啮合,所述第二圆锥齿轮数量为2个,第二圆锥齿轮一侧表面焊接有第一蜗杆,所述第一壳体底部表面焊接有第二壳体,第一壳体内壁一侧焊接有第一转动轴,通过此装置,操作人员可以方便快捷的更换清洗工作部件,省时省力,节约时间,提高效率,降低操作人员体力劳动,另一方便可以实现
一种机械臂装置.pdf
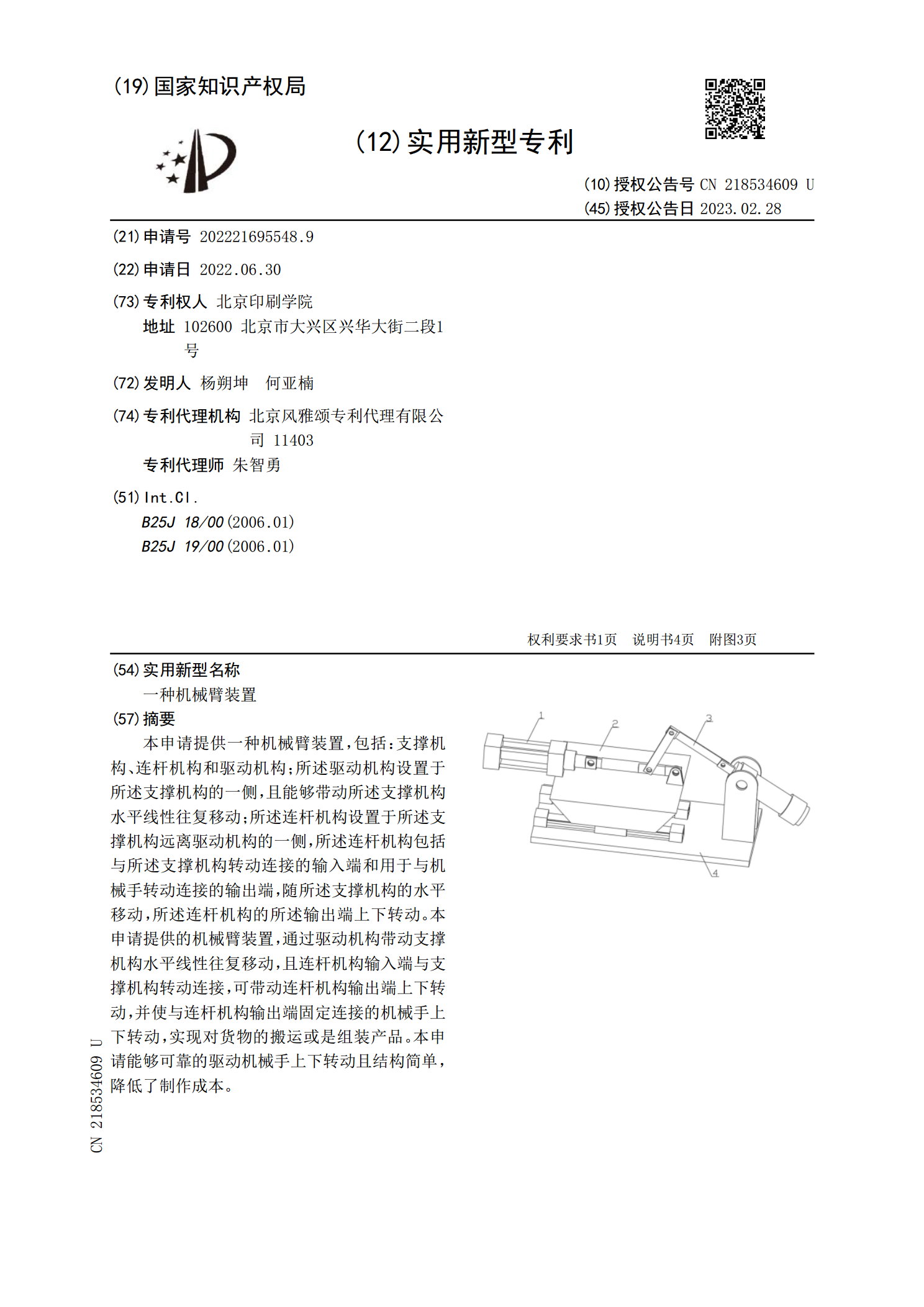
本申请提供一种机械臂装置,包括:支撑机构、连杆机构和驱动机构;所述驱动机构设置于所述支撑机构的一侧,且能够带动所述支撑机构水平线性往复移动;所述连杆机构设置于所述支撑机构远离驱动机构的一侧,所述连杆机构包括与所述支撑机构转动连接的输入端和用于与机械手转动连接的输出端,随所述支撑机构的水平移动,所述连杆机构的所述输出端上下转动。本申请提供的机械臂装置,通过驱动机构带动支撑机构水平线性往复移动,且连杆机构输入端与支撑机构转动连接,可带动连杆机构输出端上下转动,并使与连杆机构输出端固定连接的机械手上下转动,实现
一种机械臂装置.pdf
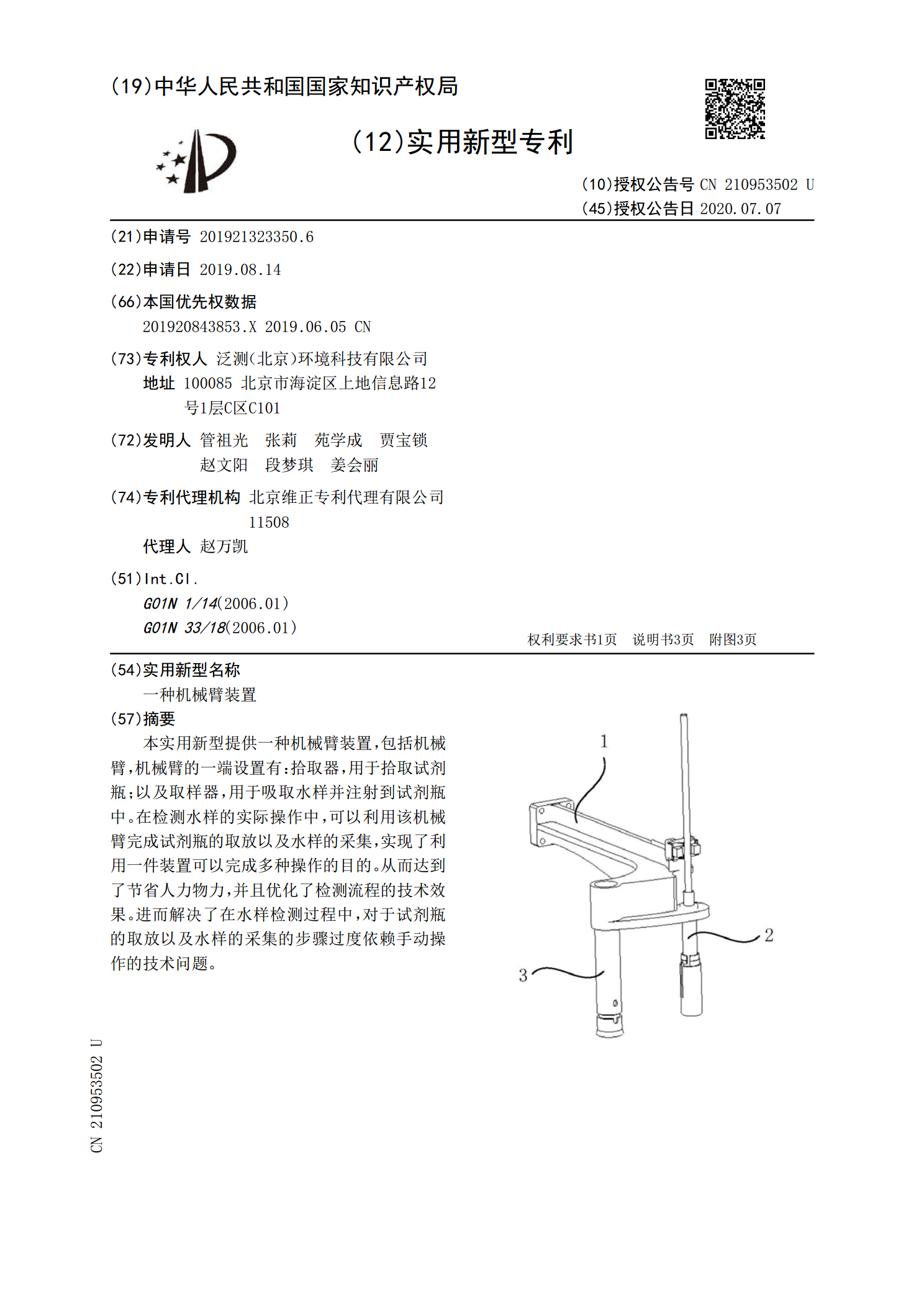
本实用新型提供一种机械臂装置,包括机械臂,机械臂的一端设置有:拾取器,用于拾取试剂瓶;以及取样器,用于吸取水样并注射到试剂瓶中。在检测水样的实际操作中,可以利用该机械臂完成试剂瓶的取放以及水样的采集,实现了利用一件装置可以完成多种操作的目的。从而达到了节省人力物力,并且优化了检测流程的技术效果。进而解决了在水样检测过程中,对于试剂瓶的取放以及水样的采集的步骤过度依赖手动操作的技术问题。
一种建筑墙面砂浆喷涂机械臂.pdf
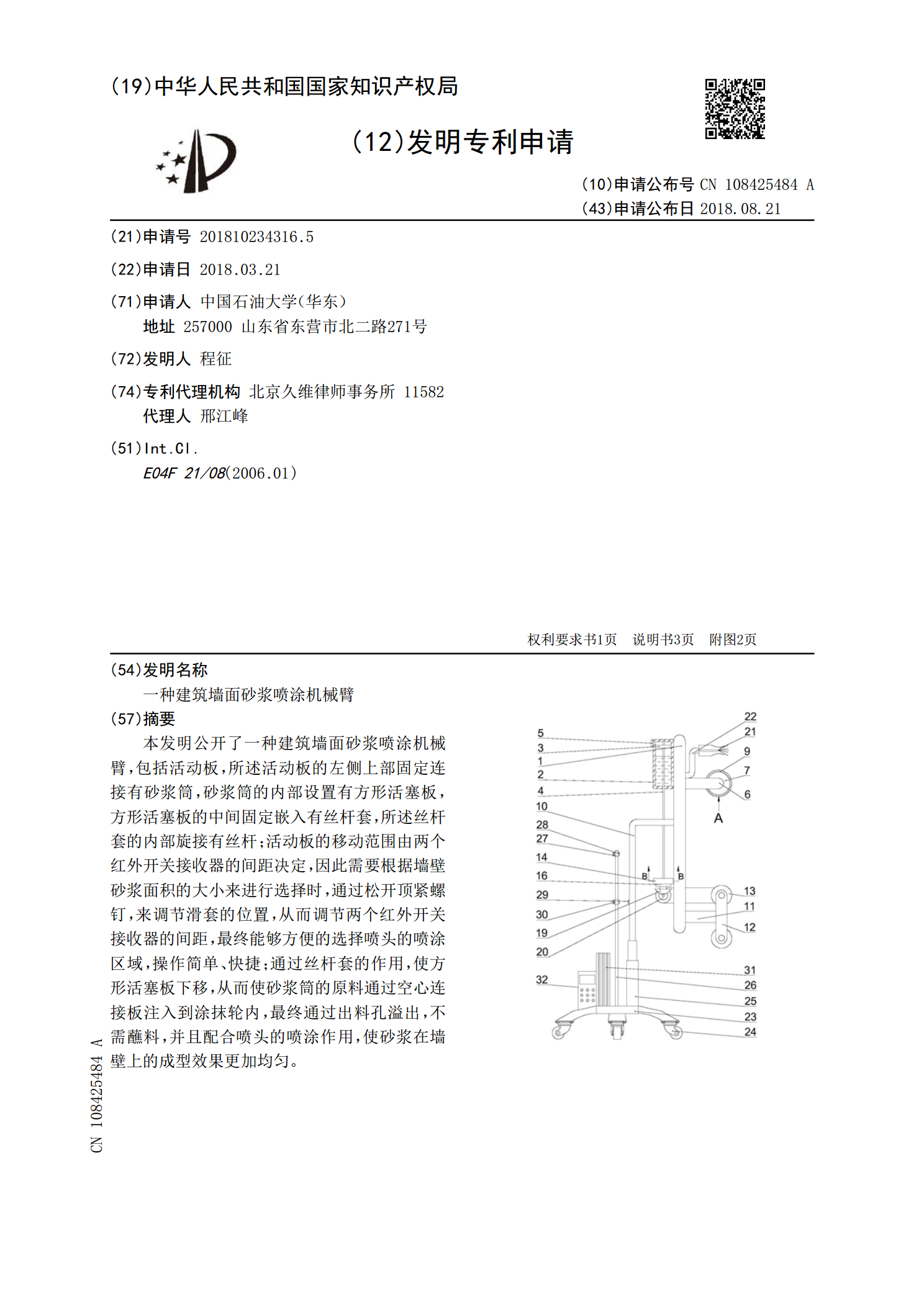
本发明公开了一种建筑墙面砂浆喷涂机械臂,包括活动板,所述活动板的左侧上部固定连接有砂浆筒,砂浆筒的内部设置有方形活塞板,方形活塞板的中间固定嵌入有丝杆套,所述丝杆套的内部旋接有丝杆;活动板的移动范围由两个红外开关接收器的间距决定,因此需要根据墙壁砂浆面积的大小来进行选择时,通过松开顶紧螺钉,来调节滑套的位置,从而调节两个红外开关接收器的间距,最终能够方便的选择喷头的喷涂区域,操作简单、快捷;通过丝杆套的作用,使方形活塞板下移,从而使砂浆筒的原料通过空心连接板注入到涂抹轮内,最终通过出料孔溢出,不需蘸料,并