
混合制动的四轮毂电机驱动车辆制动防滑控制方法.pdf

斌斌****公主

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
混合制动的四轮毂电机驱动车辆制动防滑控制方法.pdf
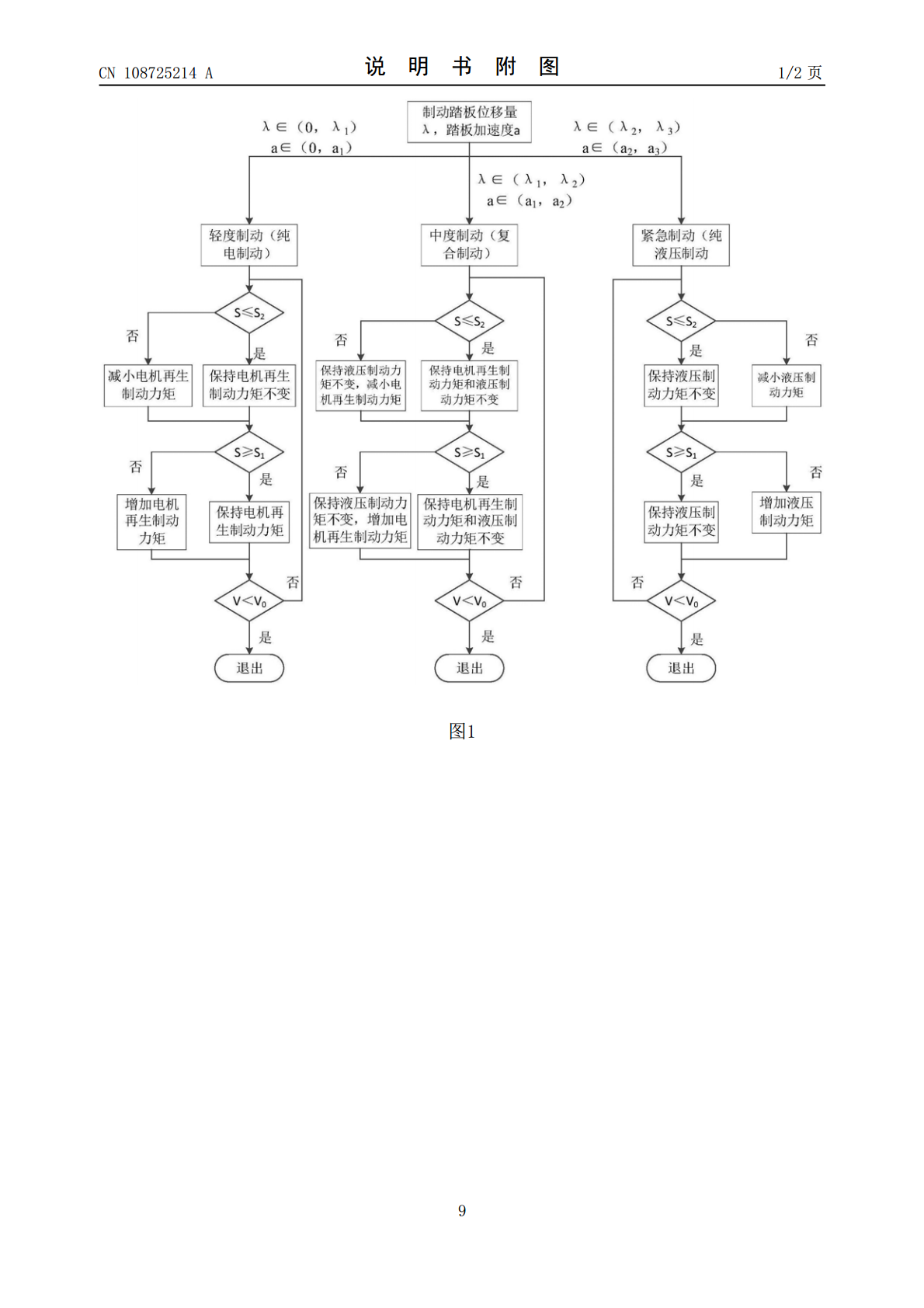
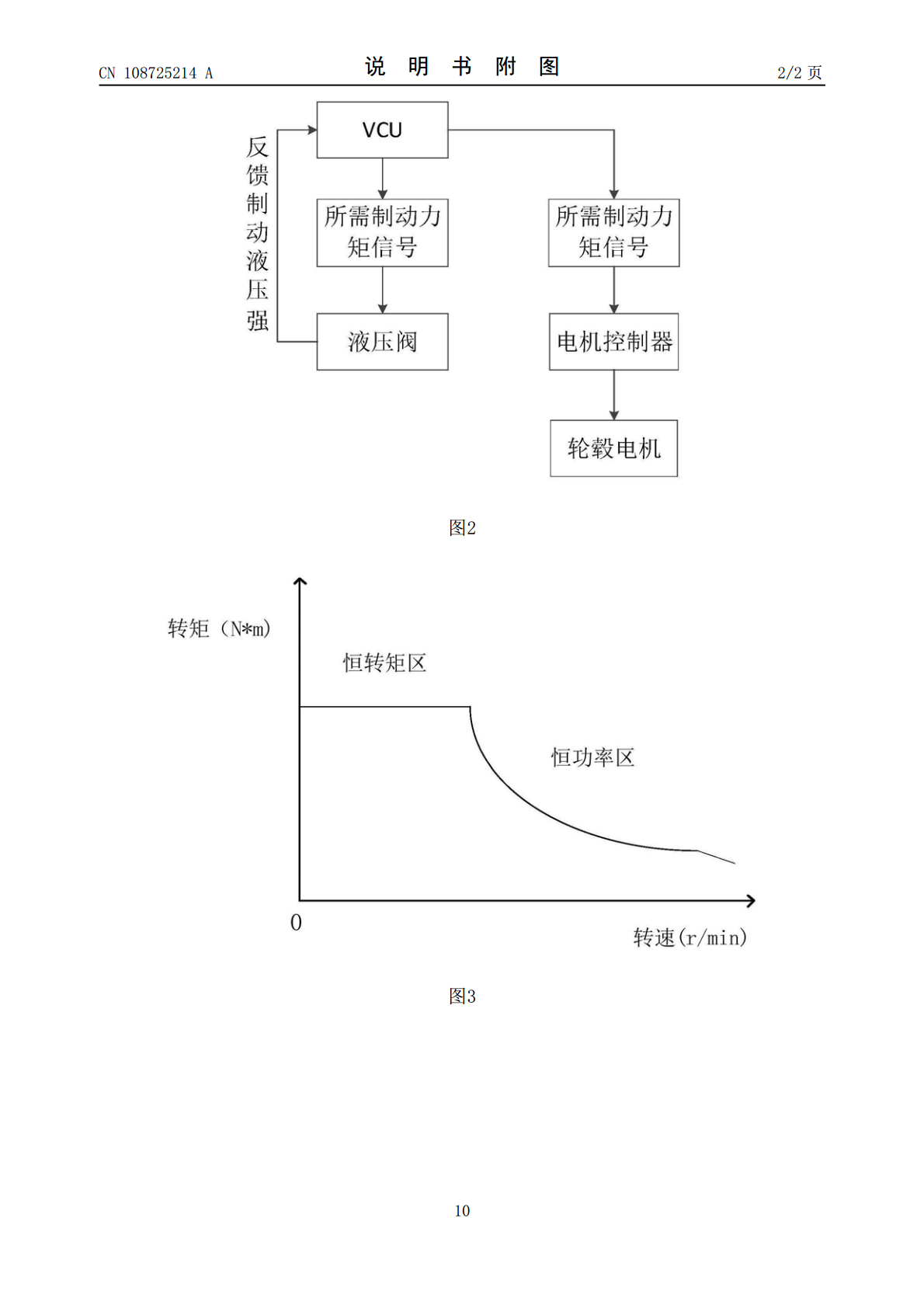
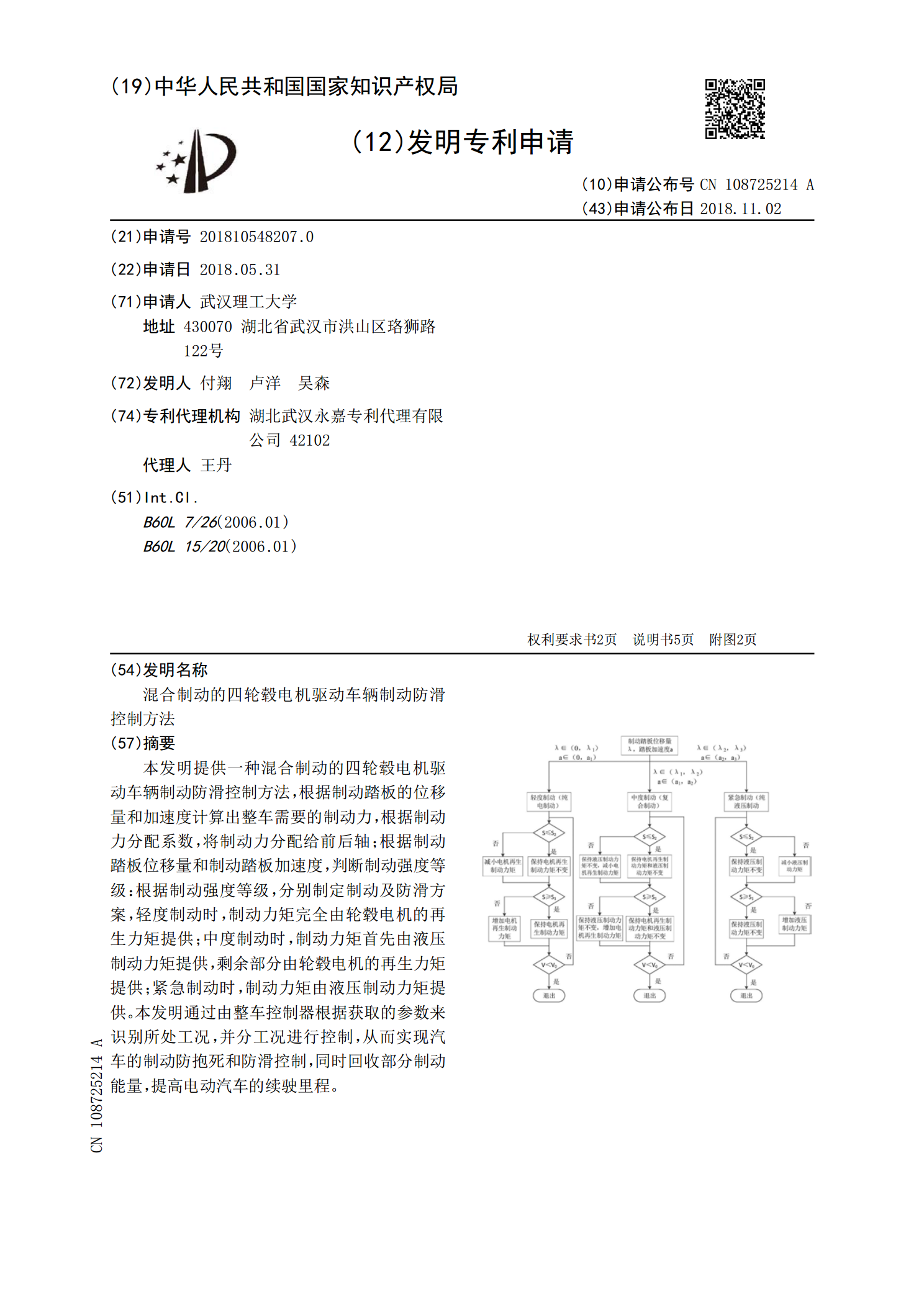
本发明提供一种混合制动的四轮毂电机驱动车辆制动防滑控制方法,根据制动踏板的位移量和加速度计算出整车需要的制动力,根据制动力分配系数,将制动力分配给前后轴;根据制动踏板位移量和制动踏板加速度,判断制动强度等级:根据制动强度等级,分别制定制动及防滑方案,轻度制动时,制动力矩完全由轮毂电机的再生力矩提供;中度制动时,制动力矩首先由液压制动力矩提供,剩余部分由轮毂电机的再生力矩提供;紧急制动时,制动力矩由液压制动力矩提供。本发明通过由整车控制器根据获取的参数来识别所处工况,并分工况进行控制,从而实现汽车的制动防抱

用于轮毂电机驱动型电动助力车的制动防滑方法.pdf
本发明公开一种用于轮毂电机驱动型电动助力车的制动防滑方法,包括以下步骤:前后驱动轮驱动力的计算、名义扭矩值的计算、扭矩值比较与调整。本发明涉及的一种用于轮毂电机驱动型电动助力车的制动防滑方法,运用角速度传感器与轮速传感器,通过扭矩的计算与比较,达到使双轮驱动的电动助力车制动防滑的目的,具有广阔的应用前景。

用于分布式驱动车辆的制动器的制动盘以及轮毂电机驱动组件.pdf
本发明提供一种用于分布式驱动车辆的制动器的制动盘,该制动盘包括:被制动部,该被制动部被设置成当与制动器的动作部接触时产生制动力;转轴固定部,被设置成可与转动轴固定以传递旋转运动使制动盘旋转;复数个叶片,设置在被制动部与转轴固定部之间并连接二者,这些叶片被设置成可在制动盘旋转时形成轴向空气流动的形状排列。本发明还提出一种用于分布式驱动车辆的轮毂电机驱动组件。利用本发明的制动盘,可在车辆行驶或者制动过程中,产生轴向的空气流动,对驱动电机进行高效冷却。
一种轮毂电机驱动汽车再生制动系统及制动方法.pdf
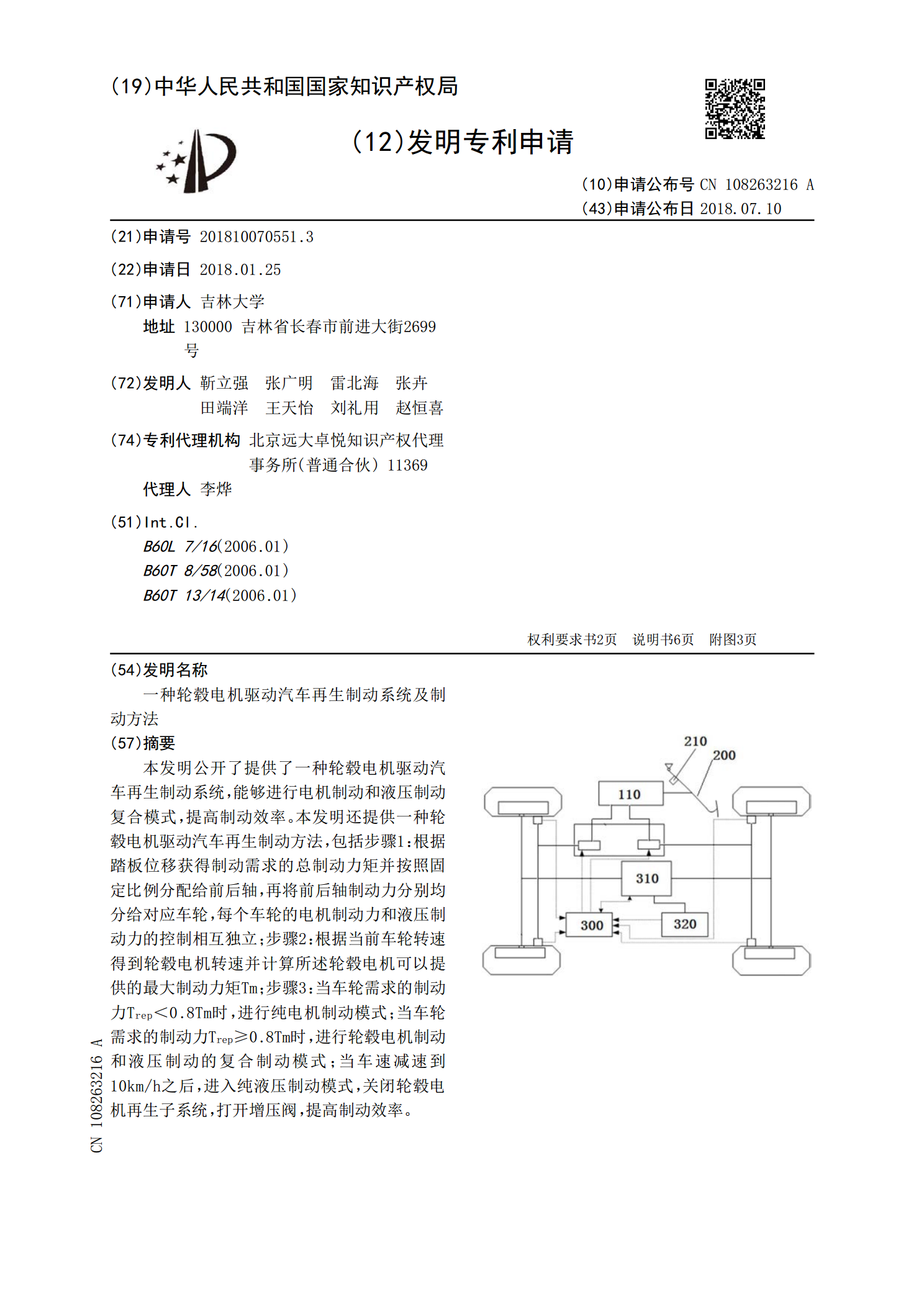
本发明公开了提供了一种轮毂电机驱动汽车再生制动系统,能够进行电机制动和液压制动复合模式,提高制动效率。本发明还提供一种轮毂电机驱动汽车再生制动方法,包括步骤1:根据踏板位移获得制动需求的总制动力矩并按照固定比例分配给前后轴,再将前后轴制动力分别均分给对应车轮,每个车轮的电机制动力和液压制动力的控制相互独立;步骤2:根据当前车轮转速得到轮毂电机转速并计算所述轮毂电机可以提供的最大制动力矩Tm;步骤3:当车轮需求的制动力T

车辆制动/驱动力控制系统和车辆制动/驱动力控制方法.pdf
一种制动/驱动力控制,在具有使车轮各自产生驱动力或制动力的制动/驱动力产生机构以及将每个簧下车轮联接到簧上车身的悬架机构的车辆中,该制动/驱动力控制控制制动/驱动力产生机构,以使车轮各自产生驱动力或制动力,该控制包括:对用于使车辆行驶的驾驶员的操作状态进行检测;对车辆行驶时车身的运动状态进行检测;基于检测到的操作状态和运动状态来计算用于使车辆行驶的目标纵向驱动力以及用于控制车身行为的运动状态总量;以及计算分配到车轮的驱动力或制动力,以获得计算出的目标纵向驱动力和目标运动状态总量,并且该驱动力或制动力由制动