
用于轮毂电机驱动型电动助力车的制动防滑方法.pdf

代瑶****zy

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于轮毂电机驱动型电动助力车的制动防滑方法.pdf
本发明公开一种用于轮毂电机驱动型电动助力车的制动防滑方法,包括以下步骤:前后驱动轮驱动力的计算、名义扭矩值的计算、扭矩值比较与调整。本发明涉及的一种用于轮毂电机驱动型电动助力车的制动防滑方法,运用角速度传感器与轮速传感器,通过扭矩的计算与比较,达到使双轮驱动的电动助力车制动防滑的目的,具有广阔的应用前景。
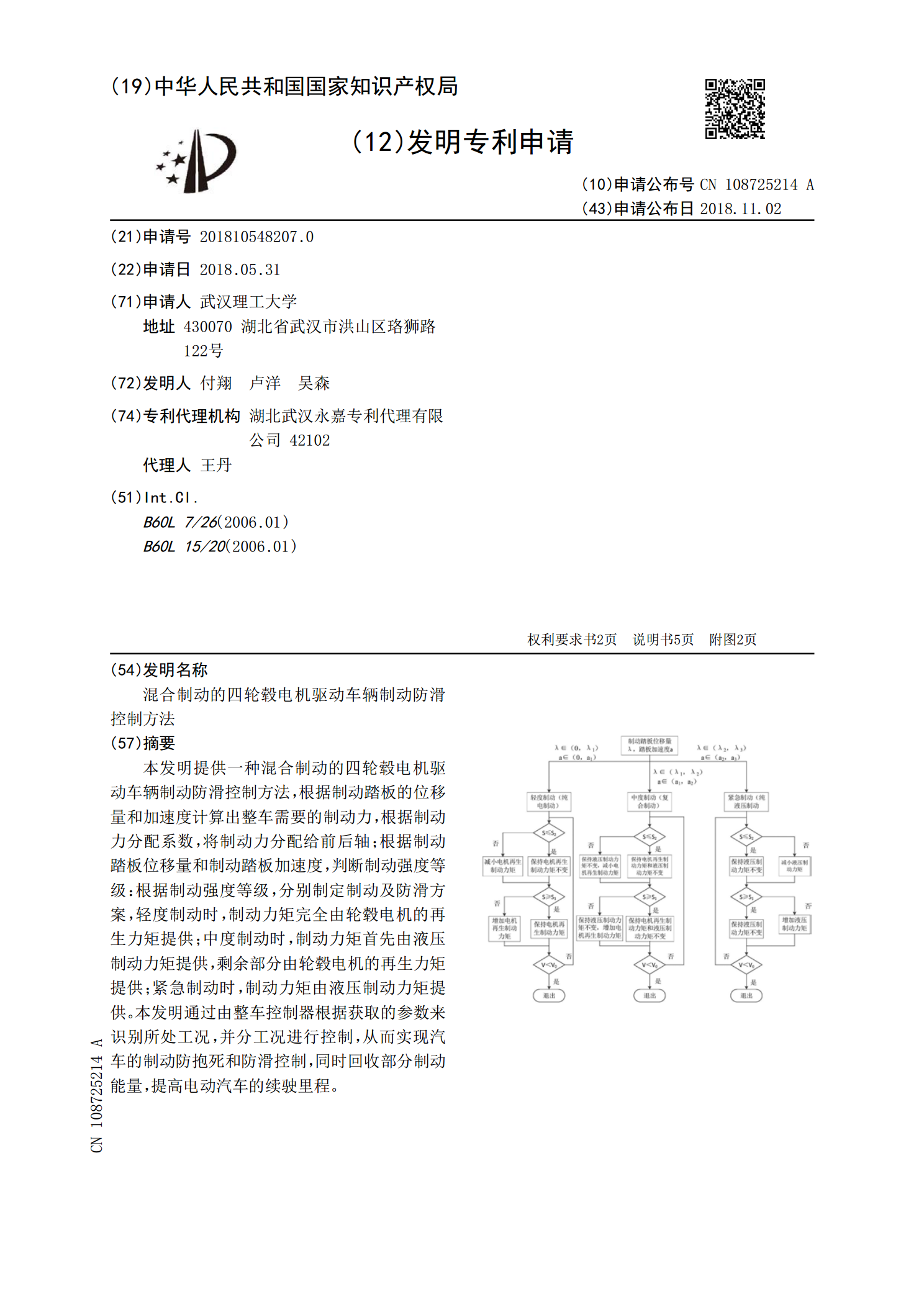
混合制动的四轮毂电机驱动车辆制动防滑控制方法.pdf
本发明提供一种混合制动的四轮毂电机驱动车辆制动防滑控制方法,根据制动踏板的位移量和加速度计算出整车需要的制动力,根据制动力分配系数,将制动力分配给前后轴;根据制动踏板位移量和制动踏板加速度,判断制动强度等级:根据制动强度等级,分别制定制动及防滑方案,轻度制动时,制动力矩完全由轮毂电机的再生力矩提供;中度制动时,制动力矩首先由液压制动力矩提供,剩余部分由轮毂电机的再生力矩提供;紧急制动时,制动力矩由液压制动力矩提供。本发明通过由整车控制器根据获取的参数来识别所处工况,并分工况进行控制,从而实现汽车的制动防抱
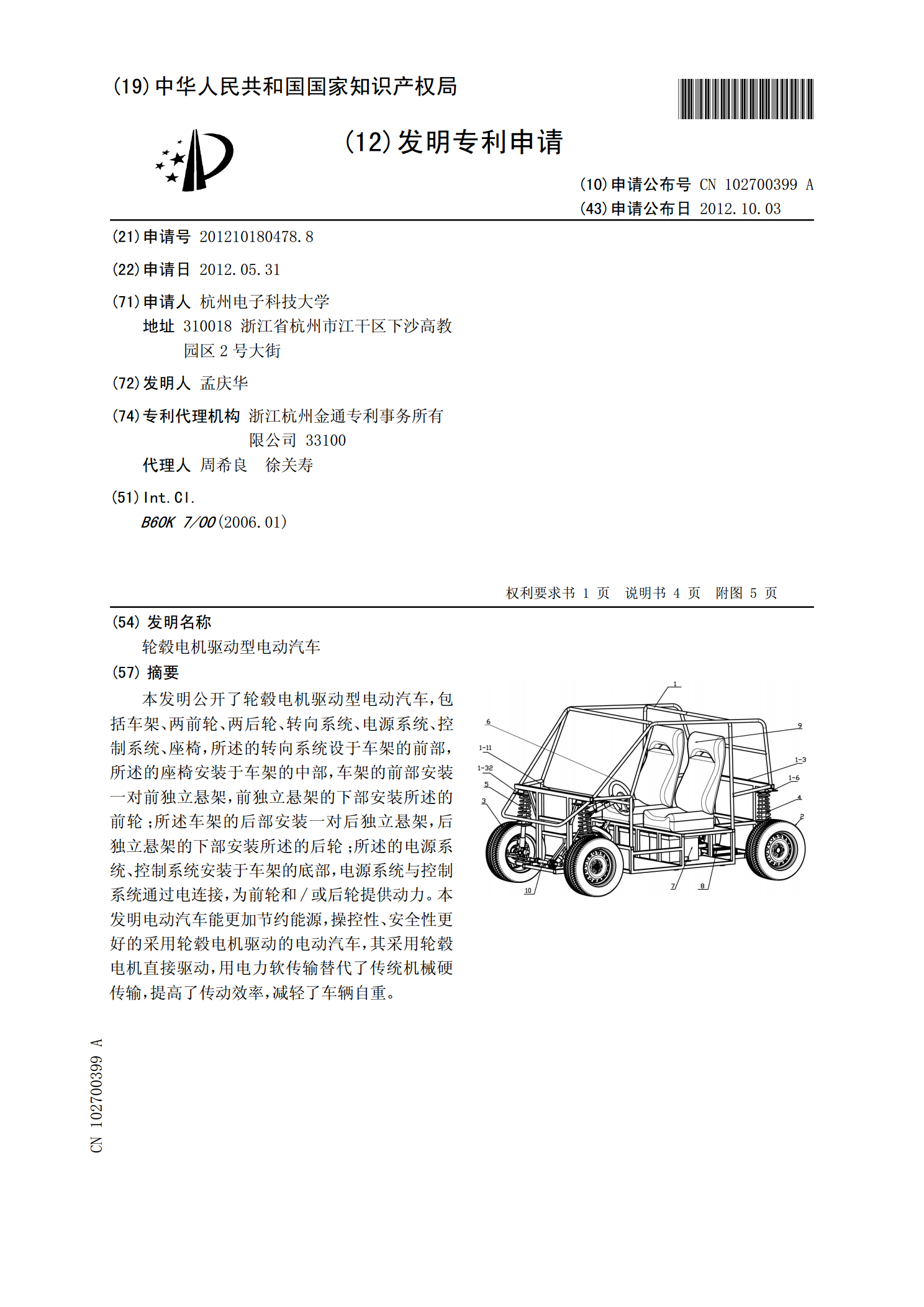
轮毂电机驱动型电动汽车.pdf
本发明公开了轮毂电机驱动型电动汽车,包括车架、两前轮、两后轮、转向系统、电源系统、控制系统、座椅,所述的转向系统设于车架的前部,所述的座椅安装于车架的中部,车架的前部安装一对前独立悬架,前独立悬架的下部安装所述的前轮;所述车架的后部安装一对后独立悬架,后独立悬架的下部安装所述的后轮;所述的电源系统、控制系统安装于车架的底部,电源系统与控制系统通过电连接,为前轮和/或后轮提供动力。本发明电动汽车能更加节约能源,操控性、安全性更好的采用轮毂电机驱动的电动汽车,其采用轮毂电机直接驱动,用电力软传输替代了传统机械

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,

电动助力车驱动轮毂.pdf
电动助力车驱动轮毂,结构中包括有轮毂套单元,动力结构单元,传动驱动结构单元和人力驱动结构单元等部分。其电力驱动和人力驱动方式共用一套减速/增速变速系统,具有电力驱动和人力驱动混用的功能,可实现电机驱动的多速功能和人力驱动多速功能间的转换,并还可具有电动驱动倒档和人力驱动倒档功能;可进一步实现人力驱动无链条传动,可有效防止外界环境的影响,是一种更为安全可靠的全封闭的电动助力车驱动轮毂结构,为小轮径车和各型车辆提供了更广阔的发展空间。