
一种砍树机器人用的攀爬机构.pdf

鸿朗****ka


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种砍树机器人用的攀爬机构.pdf
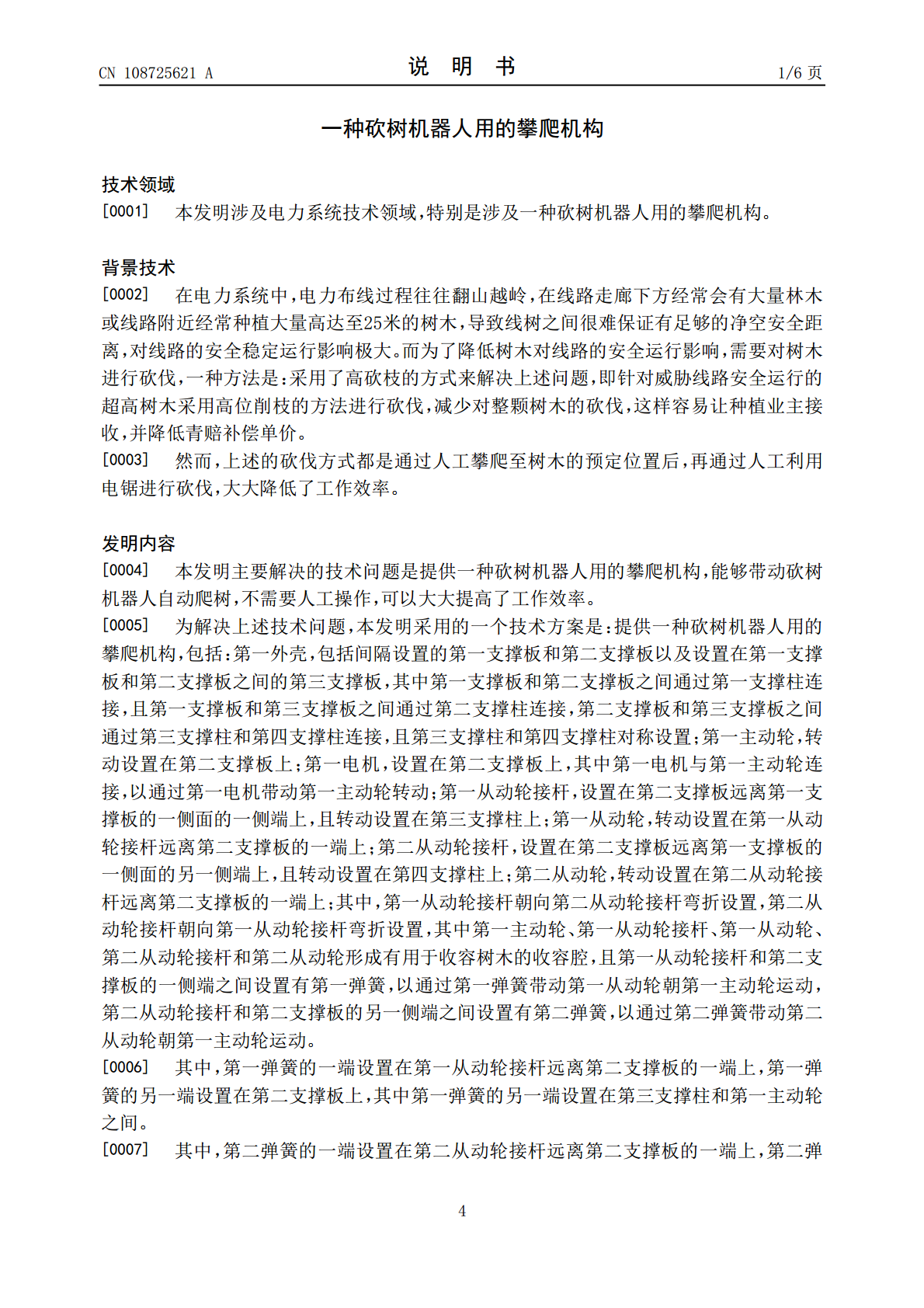
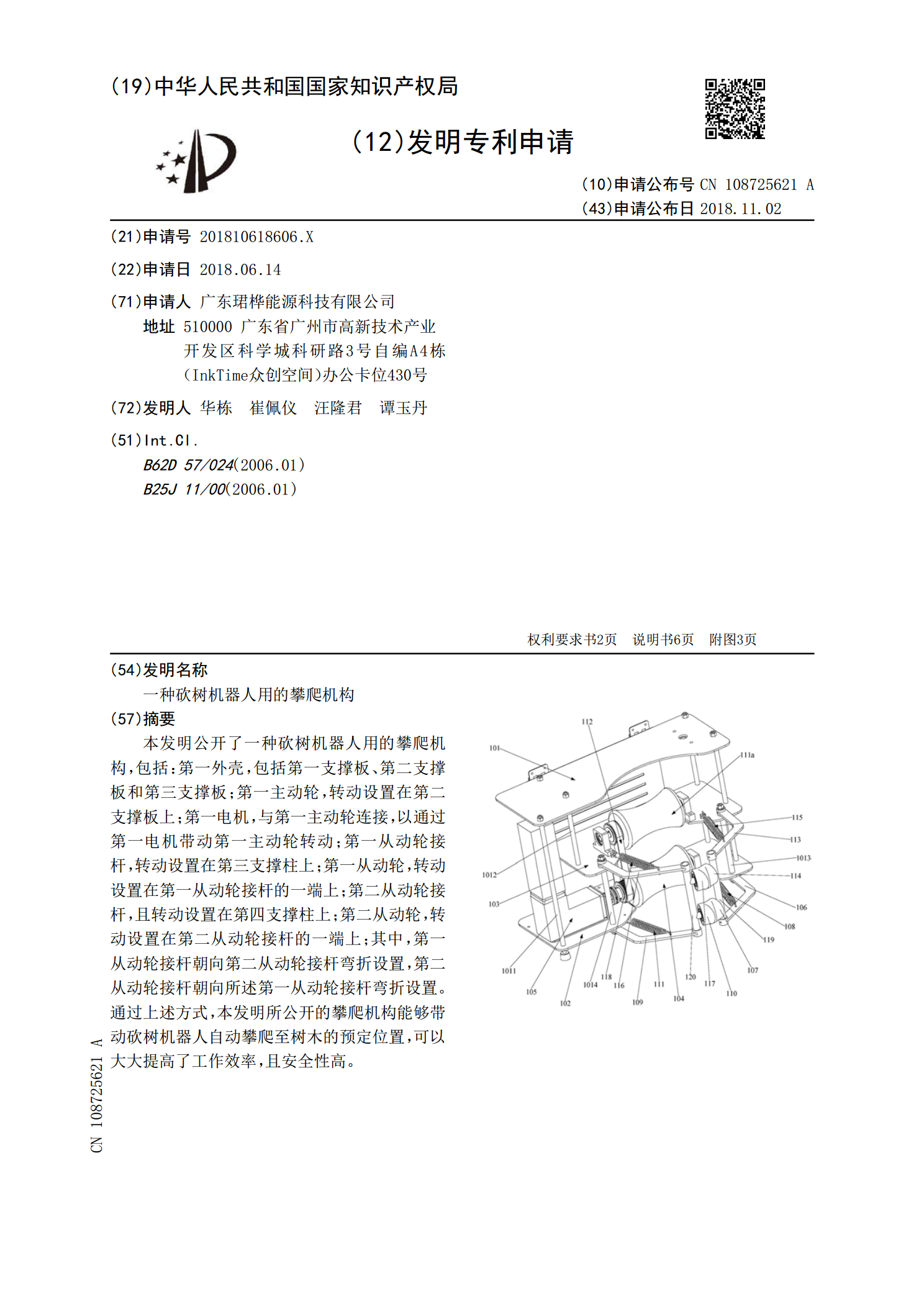
本发明公开了一种砍树机器人用的攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的攀爬机构能够带动砍树
一种砍树机器人用的攀爬机构.pdf
本发明公开了一种砍树机器人用的攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的攀爬机构能够带动砍树
一种高空作业用的砍树攀爬机构.pdf
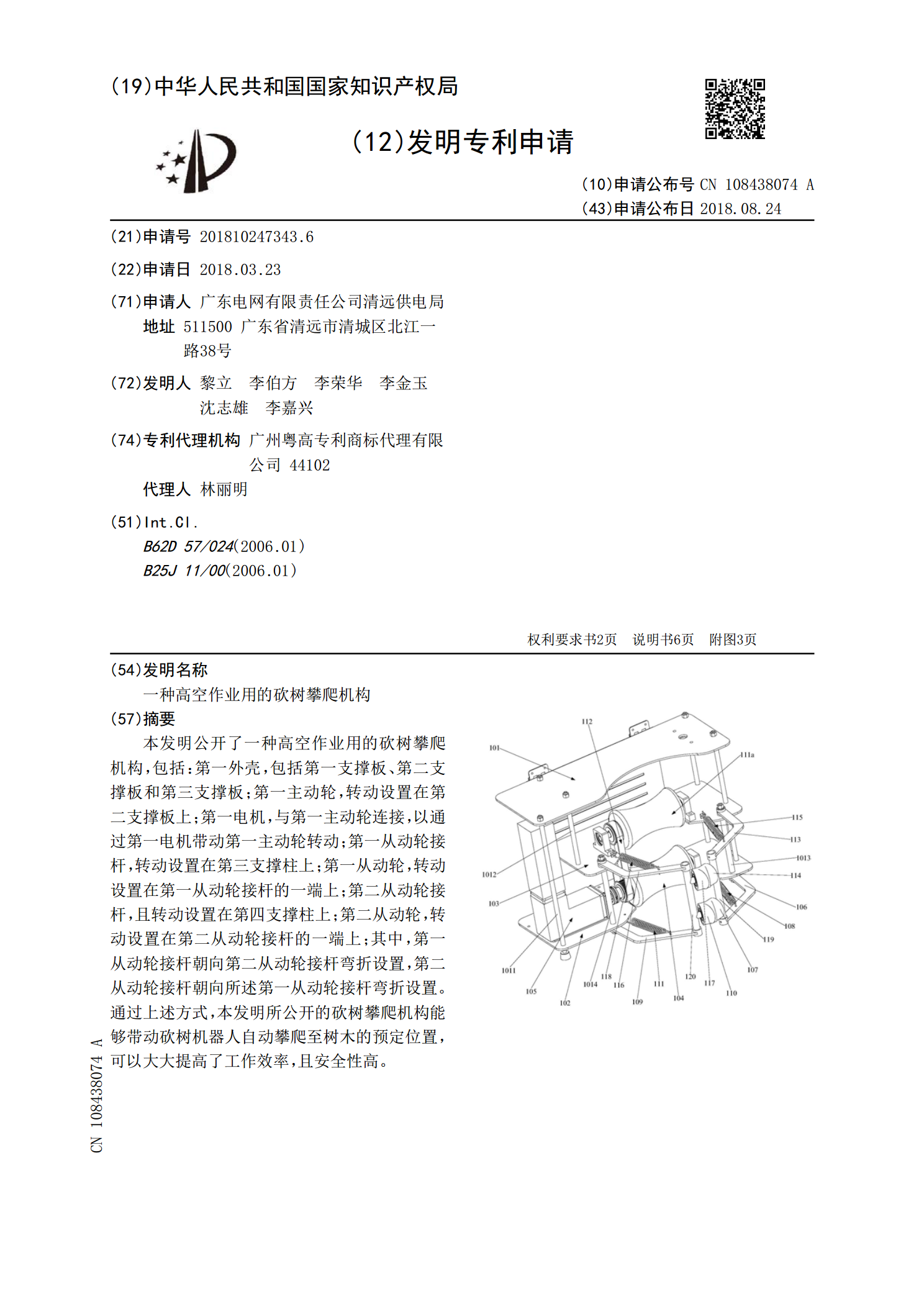
本发明公开了一种高空作业用的砍树攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的砍树攀爬机构能够带

一种攀爬机器人用行走机构.pdf
本发明公开了一种攀爬机器人用行走机构,包括中间行走机构、两个侧行走机构和两个翻转机构;中间行走机构包括主框架和万向行走机构一;万向行走机构一具有位于主框架内侧的万向轮;两个侧行走机构对称布设在中间行走机构的两侧,每个侧行走机构均包括副框架、驱动行走机构和万向行走机构二;两个副框架均与主框架相铰接,并能在对应翻转机构的驱动下,实现与主框架的相对翻转与夹紧;驱动行走机构和万向行走机构二均设置在副框架上,驱动行走机构具有位于副框架内侧的主动轮,万向行走机构二具有位于副框架内侧的万向轮。本发明一方面能够适应沿斜面

一种智能攀爬机器人用水平滑移机构.pdf
本发明涉及一种智能攀爬机器人用水平滑移机构,包括E型机架、U型机架、载物箱、水平驱动机构及控制电路,U型机架嵌于E型机架前端面并通过水平滑移机构相互连接,载物箱安装在U型机架上端面并与U型机架同轴分布,载物箱下端面均布至少四个导向轮,并通过导向轮与E型机架上端面连接,控制电路位于E型机架外侧面,并分别水平驱动机构电气连接,水平驱动机构包括丝杆、分合丝套、延伸套管、导向柱、扇形齿轮组、分合电机、行程传感器、压力传感器、限位传感器。本发明结构简单,生产及维护成本低,安装、操作及维护简单,结构可靠性好,通用性好