
一种高空作业用的砍树攀爬机构.pdf

山梅****ai

1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高空作业用的砍树攀爬机构.pdf
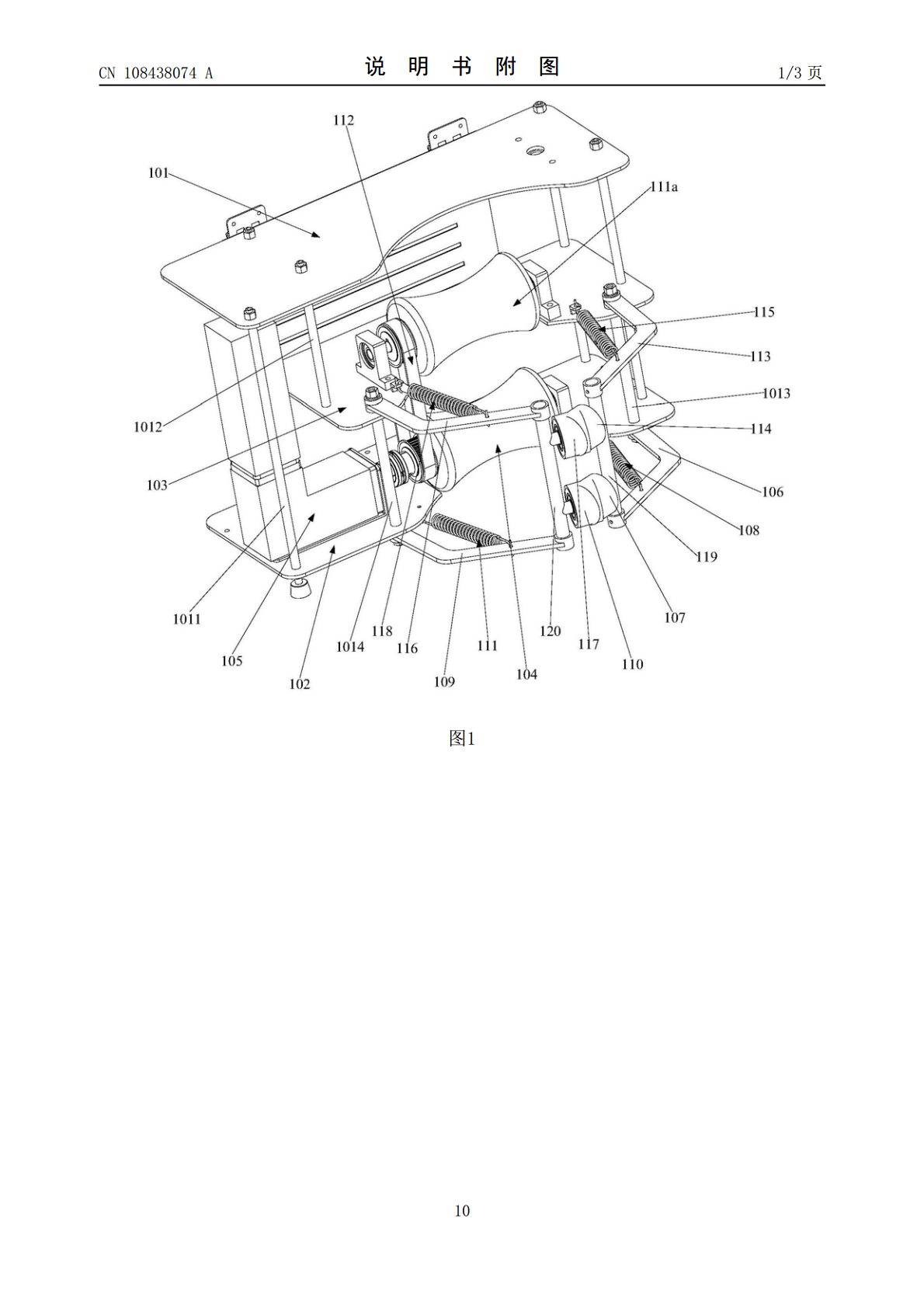
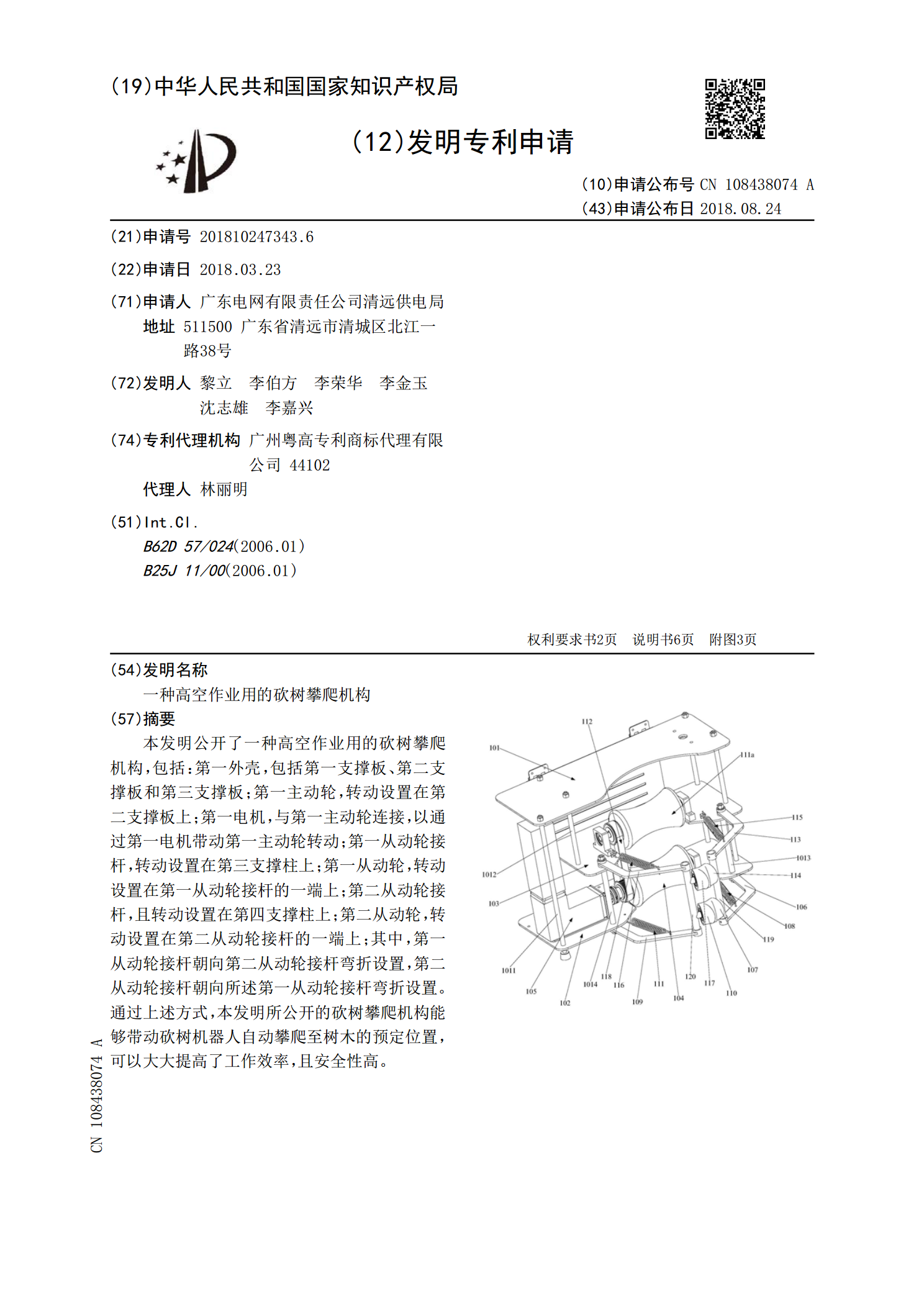
本发明公开了一种高空作业用的砍树攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的砍树攀爬机构能够带

一种砍树机器人用的攀爬机构.pdf
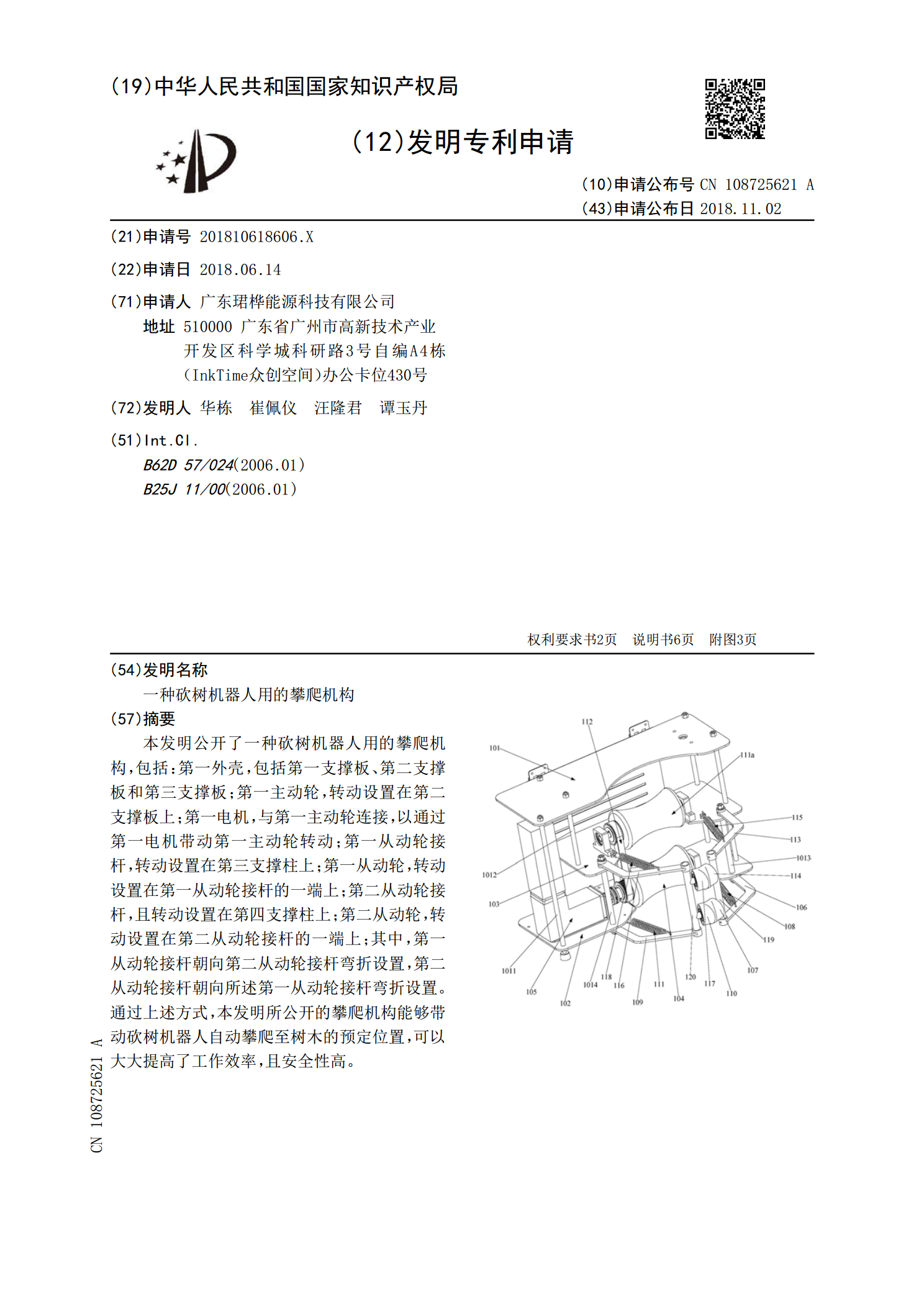
本发明公开了一种砍树机器人用的攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的攀爬机构能够带动砍树
一种砍树机器人用的攀爬机构.pdf
本发明公开了一种砍树机器人用的攀爬机构,包括:第一外壳,包括第一支撑板、第二支撑板和第三支撑板;第一主动轮,转动设置在第二支撑板上;第一电机,与第一主动轮连接,以通过第一电机带动第一主动轮转动;第一从动轮接杆,转动设置在第三支撑柱上;第一从动轮,转动设置在第一从动轮接杆的一端上;第二从动轮接杆,且转动设置在第四支撑柱上;第二从动轮,转动设置在第二从动轮接杆的一端上;其中,第一从动轮接杆朝向第二从动轮接杆弯折设置,第二从动轮接杆朝向所述第一从动轮接杆弯折设置。通过上述方式,本发明所公开的攀爬机构能够带动砍树

一种高空建筑用自吸附式攀爬机构.pdf
本发明公开了一种高空建筑用自吸附式攀爬机构,包括机架、四个滚轮和吸附装置;机架与待攀爬的高空建筑表面相平行;四个滚轮对称设在吸附装置两侧,其中任意一个、两个或多个滚轮为主动轮;吸附装置包括大带轮、小带轮、柔性带和吸盘;大带轮和小带轮均通过支架安装在机架上,大带轮位于行进方向的前端,小带轮位于行进方向的尾端;大带轮或小带轮为驱动轮;柔性带套装在大带轮和小带轮外周,朝向机架一侧的柔性带与机架相平行,背离机架一侧的柔性带与机架之间具有倾角α;吸盘均匀布设在柔性带的外表面,每个吸盘的高度均能自由伸缩。本发明基于真

一种攀爬机器人用行走机构.pdf
本发明公开了一种攀爬机器人用行走机构,包括中间行走机构、两个侧行走机构和两个翻转机构;中间行走机构包括主框架和万向行走机构一;万向行走机构一具有位于主框架内侧的万向轮;两个侧行走机构对称布设在中间行走机构的两侧,每个侧行走机构均包括副框架、驱动行走机构和万向行走机构二;两个副框架均与主框架相铰接,并能在对应翻转机构的驱动下,实现与主框架的相对翻转与夹紧;驱动行走机构和万向行走机构二均设置在副框架上,驱动行走机构具有位于副框架内侧的主动轮,万向行走机构二具有位于副框架内侧的万向轮。本发明一方面能够适应沿斜面