
一种门架式喷砂机器人.pdf

东耀****哥哥

1/10

2/10

3/10
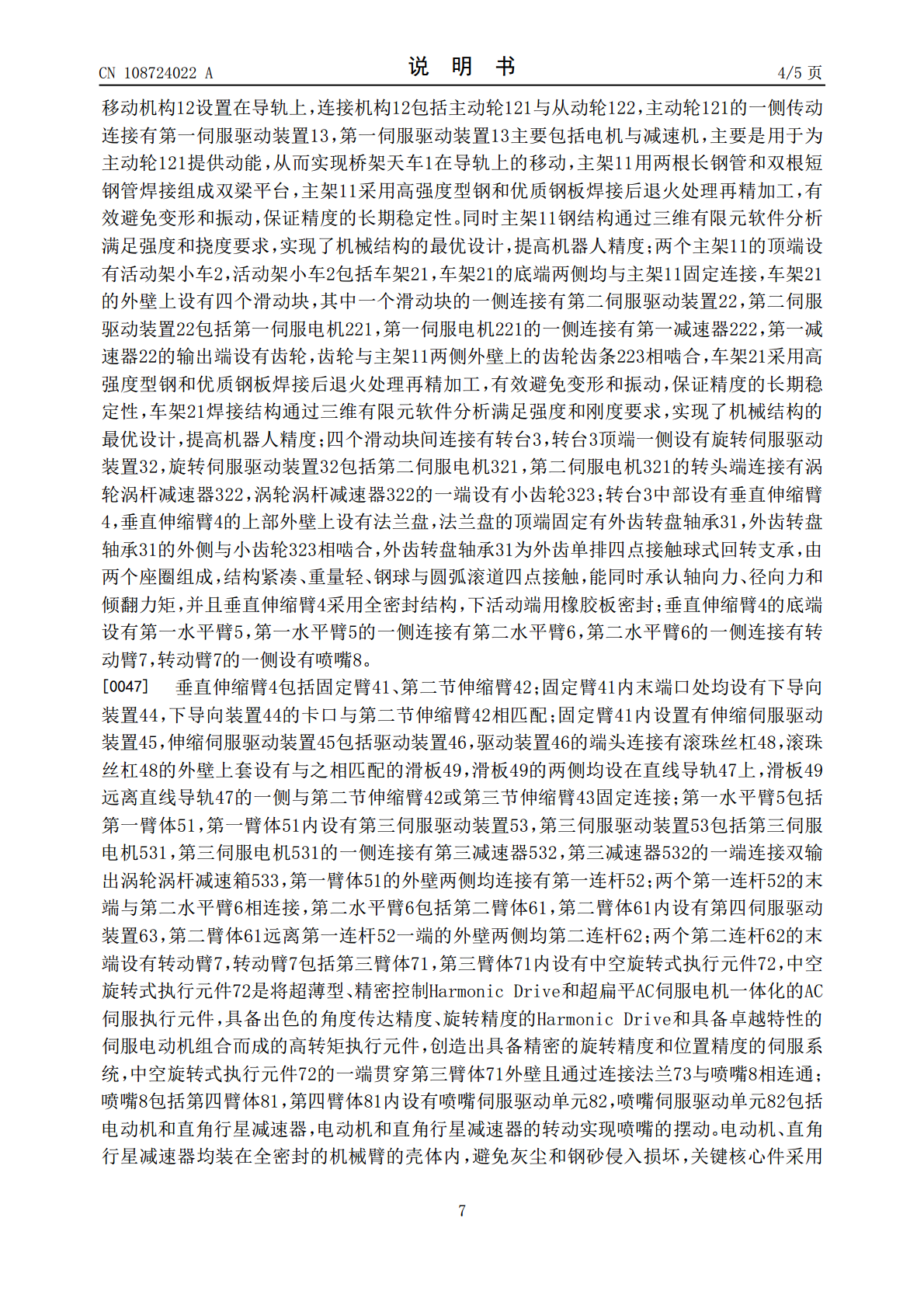
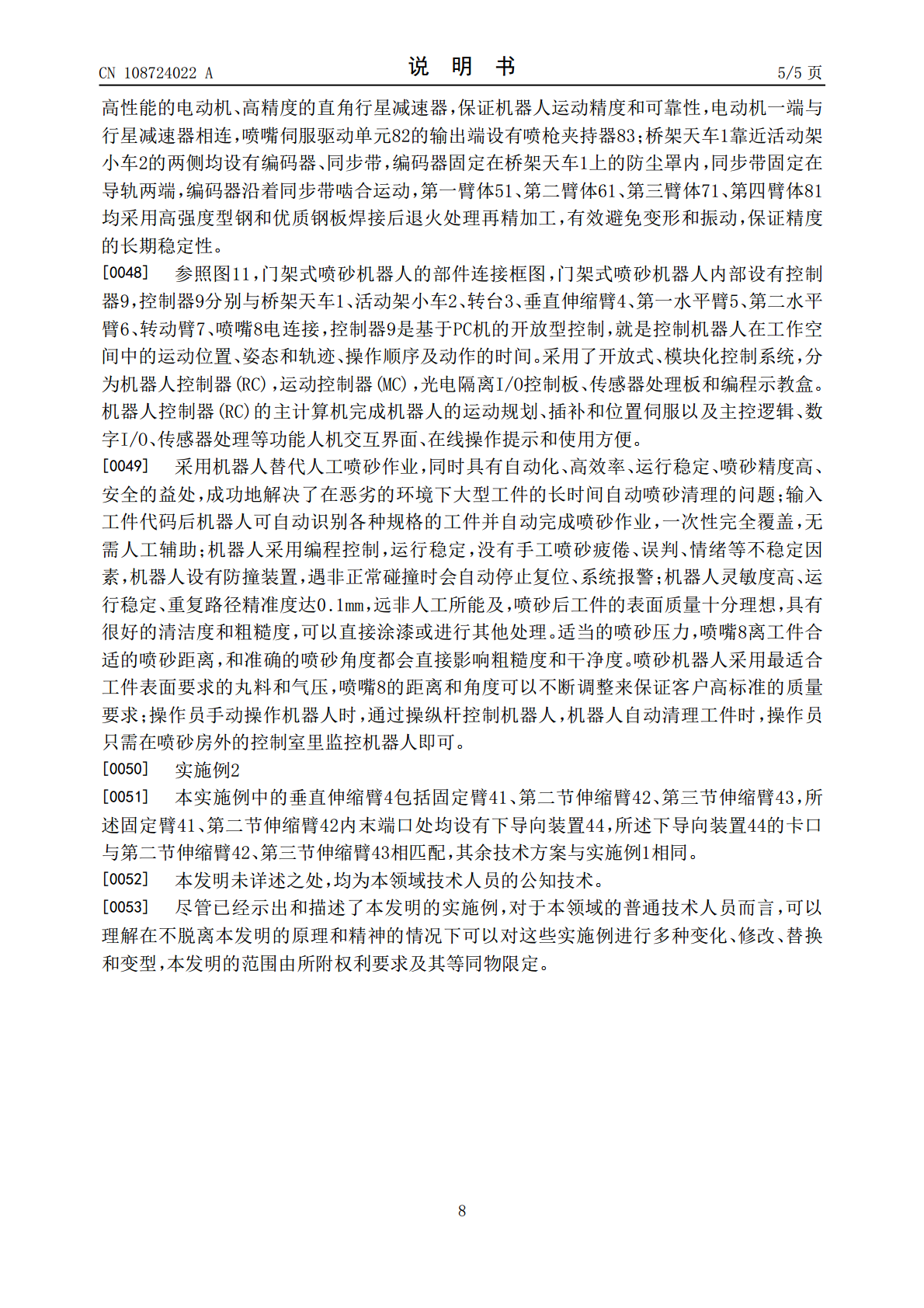
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种门架式喷砂机器人.pdf
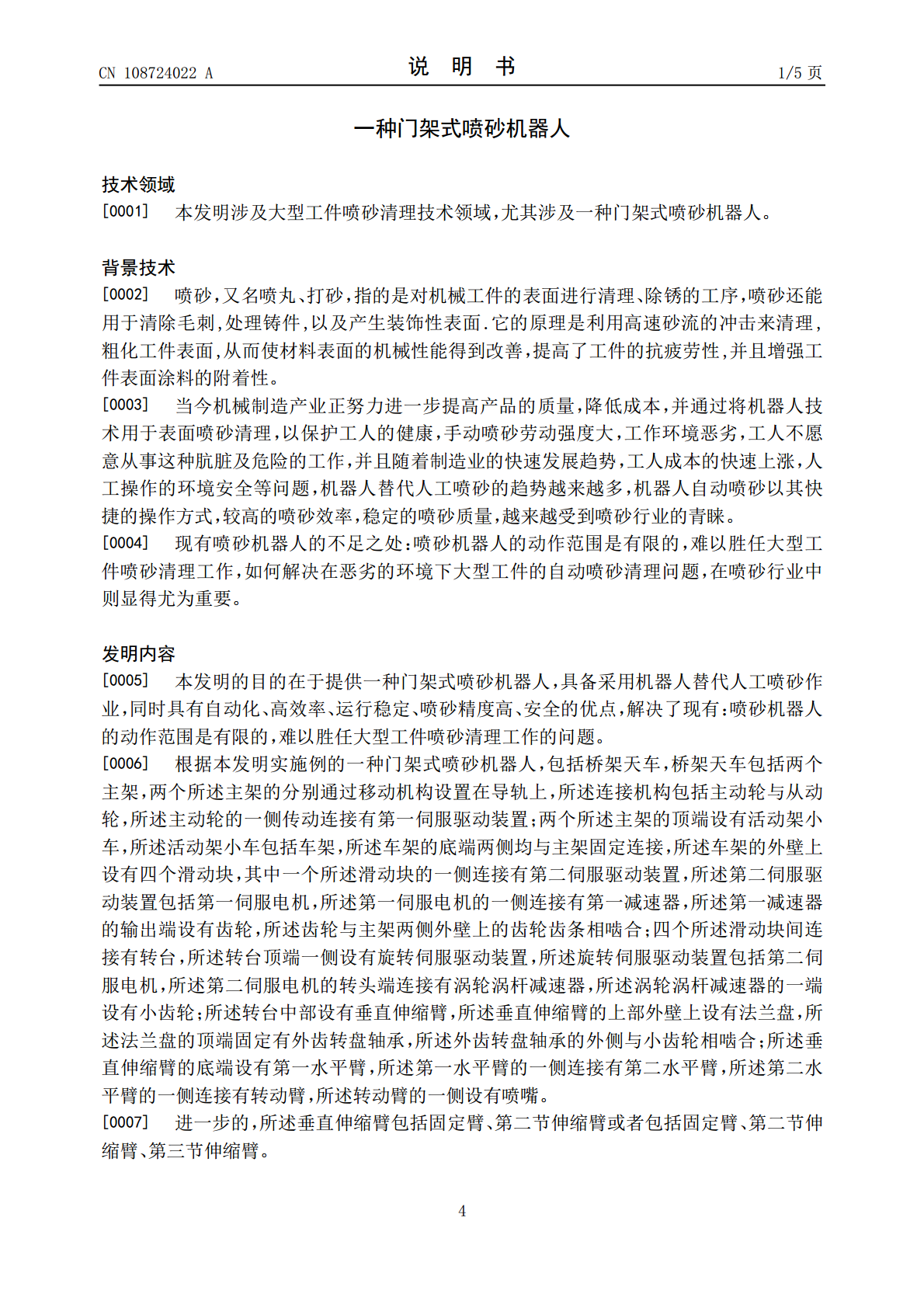
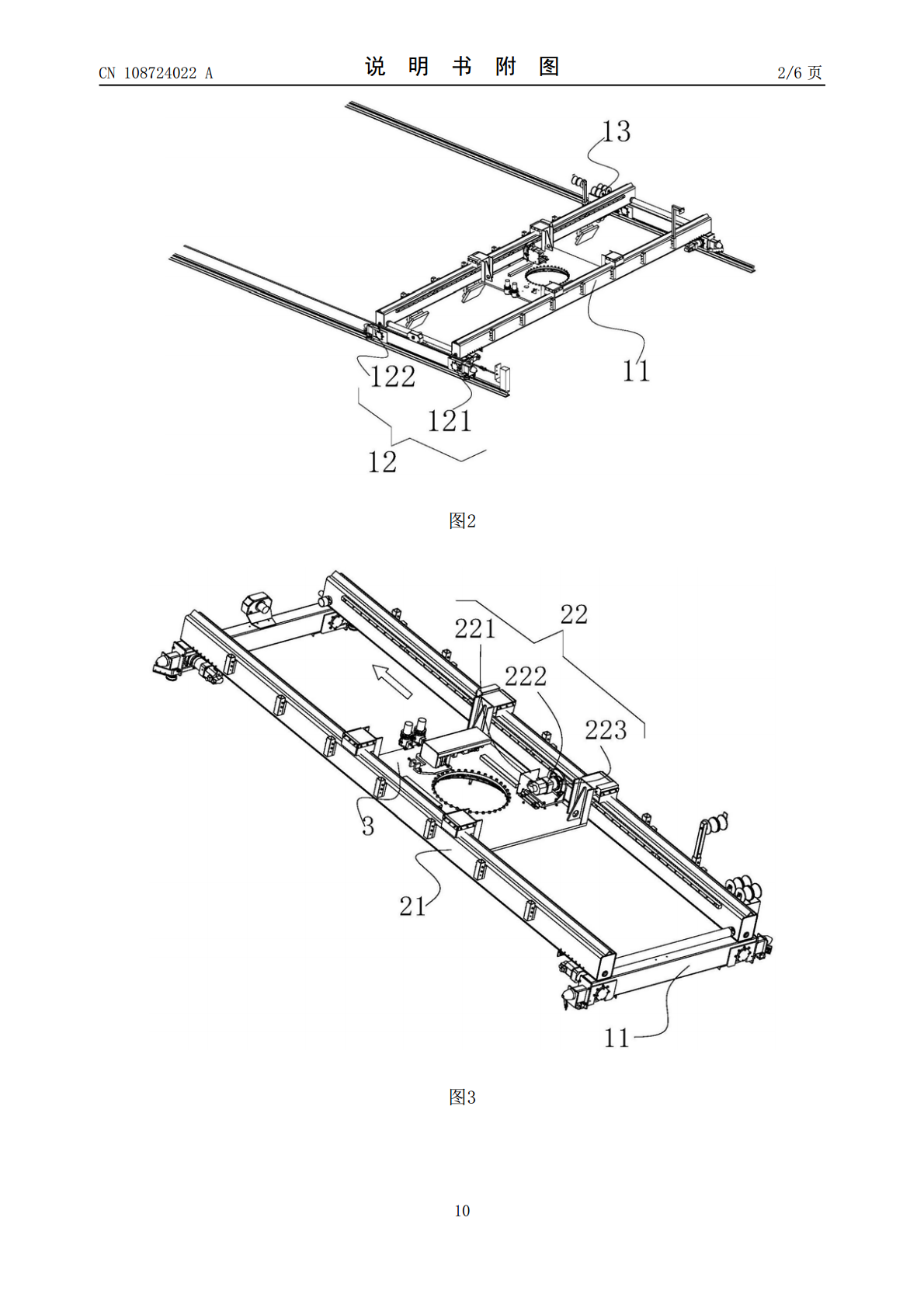
本发明公开了一种门架式喷砂机器人,包括桥架天车,桥架天车包括两个主架,两个所述主架的分别通过移动机构设置在导轨上,所述连接机构包括主动轮与从动轮,所述主动轮的一侧传动连接有第一伺服驱动装置;两个所述主架的顶端设有活动架小车,所述活动架小车包括车架,所述车架的底端两侧均与主架固定连接,所述车架的外壁上设有四个滑动块,其中一个所述滑动块的一侧连接有第二伺服驱动装置,所述第二伺服驱动装置包括第一伺服电机。本发明采用机器人替代人工喷砂作业,同时具有自动化、高效率、运行稳定、喷砂精度高、安全的益处,以及在艰苦环境中
一种门架式管道喷砂装置.pdf
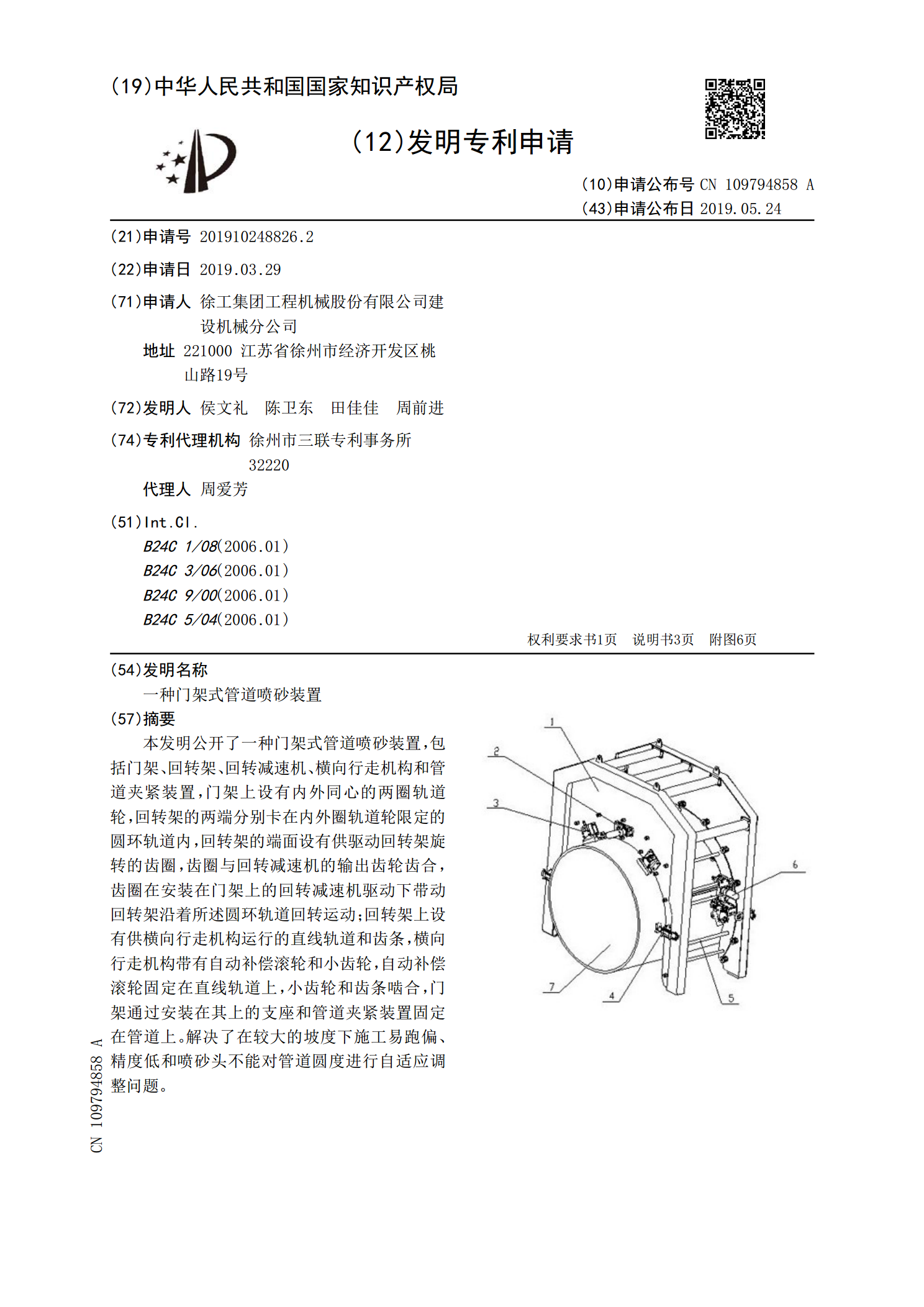
本发明公开了一种门架式管道喷砂装置,包括门架、回转架、回转减速机、横向行走机构和管道夹紧装置,门架上设有内外同心的两圈轨道轮,回转架的两端分别卡在内外圈轨道轮限定的圆环轨道内,回转架的端面设有供驱动回转架旋转的齿圈,齿圈与回转减速机的输出齿轮齿合,齿圈在安装在门架上的回转减速机驱动下带动回转架沿着所述圆环轨道回转运动;回转架上设有供横向行走机构运行的直线轨道和齿条,横向行走机构带有自动补偿滚轮和小齿轮,自动补偿滚轮固定在直线轨道上,小齿轮和齿条啮合,门架通过安装在其上的支座和管道夹紧装置固定在管道上。解决

一种侧置门架式绿篱修剪机器人.pdf
本发明提供一种侧置门架式绿篱修剪机器人,主要包括平行四边形联动机构、限位铰链、摄像头、侧置门架式可调刀组、线控底盘、供电系统、整机控制器;平行四边形联动机构主要用于调整刀组高度;限位铰链使侧置门架式可调刀组在不工作时可收回车内;摄像头主要用于刀组与绿篱中心线横向偏差检测以及视觉导航;侧置门架式可调刀组主要用于对不同宽度绿篱的三方位修剪,且采用侧置结构,在作业过程中可行走于绿篱侧方位;线控底盘主要用于承载机器人各个部件,并自动巡绿篱边界行走进行修剪作业;供电系统用于为机器人行走及作业提供动力源;本发明结构简

一种喷砂机器人.pdf
一种喷砂机器人,包括:机器人本体、连接过渡组件、喷砂装置;在机器人本体的一头、连接过渡组件和喷砂装置;所述的机器人本体包括行走机构、转向机构、回转机构;所述的行走机构有相同的两套,所述的回转机构设在两行走机构中间,所述转向机构设在行走机构之上;所述的连接过渡组件装在回转支撑架上,它是在横向模组上加装纵向模组构成;喷砂装置连装此组件可左右上下移动;所述的喷砂装置设有喷枪,喷枪是在进砂管下接喷头构成,所述的喷头上设有回收接管.本发明的有益效果是,它结构科学、机器人本体作为标准平台,搭载所需工作头,具有攀爬高空

一种机器人喷砂用夹具.pdf
本发明公开了一种机器人喷砂用夹具,涉及喷砂技术领域,针对加工件加工时,由于普通的夹具在夹持加工件工作时,会将砂浆喷的到处都是,后期处理颇为麻烦,延长工作时间,降低工作效率的问题,现提出如下方案,包括底架,所述底架的顶部固定有多个支撑架,每个所述支撑架的顶部均固定有固定架,所述固定架相互靠近的一侧均固定有导轨,所述导轨的底部内部套设有滑块,多个所述滑块的底部固定有推板,所述推板的顶部固定有支撑件,所述支撑件的顶部固定有限位架,所述限位架的底部内壁固定有限位凸块。本发明对加工件进行快速定位限位,而且在喷砂箱内