
单电机四轮驱动的电动汽车脱困控制方法.pdf

春波****公主

1/9
2/9
3/9
4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单电机四轮驱动的电动汽车脱困控制方法.pdf
本发明公开了一种单电机四轮驱动的电动汽车脱困控制方法,电动汽车包括整车控制器和一个驱动电机,驱动电机的一端通过前离合器和前驱动减速器相连接,另一端通过后离合器和后驱动减速器相连接,前驱动减速器和前轮相连接,后驱动减速器和后轮相连接;该方法包括以下步骤:整车控制器判断电动汽车的前轮和/或后轮是否处于打滑状态,并判断电动汽车是否处于前轮或后轮驱动状态,并根据判断结果调整汽车行驶模式,使汽车能够顺利脱困或进入正常行驶状态。本发明能够在汽车行驶在恶劣工况时,自动转化为四轮驱动状态,使汽车能够及时地脱困;采用单电机

单电机四轮驱动的电动汽车滑行控制方法.pdf
本发明公开了一种单电机四轮驱动的电动汽车滑行控制方法,电动汽车包括整车控制器和一个驱动电机,驱动电机的一端通过前离合器和前驱动减速器相连接,另一端通过后离合器和后驱动减速器相连接,前驱动减速器和前轮相连接,后驱动减速器和后轮相连接;该方法包括以下步骤:整车控制器判断汽车是否处于滑行状态,若判断为汽车处于滑行状态,则直接控制前轮与其轮边离合器相脱离,控制后轮与其轮边离合器相脱离,以及控制驱动电机与前、后离合器相脱离或控制驱动电机停止转动;否则进入正常行驶状态。本发明能够减少滑行状态下的机械损失,更好地节约能

单电机四轮驱动的电动汽车起步及行驶控制方法.pdf
本发明公开了一种单电机四轮驱动的电动汽车起步及行驶控制方法,电动汽车包括整车控制器和一个驱动电机,驱动电机的一端通过前离合器和前驱动减速器相连接,另一端通过后离合器和后驱动减速器相连接,前驱动减速器和前轮相连接,后驱动减速器和后轮相连接;该方法包括以下步骤:整车控制器根据电动汽车的实际载荷情况控制电动汽车的起步;起步之后,整车控制器根据实际载荷情况控制电动汽车的行驶模式,行驶模式包括前轮和后轮同时驱动模式、前轮驱动模式和后轮驱动模式。本发明能够有效实现了汽车动力的优化控制;大降低了整车重量和成本,能够更好
一种轮毂电机驱动的四轮驱动电动汽车控制方法.pdf
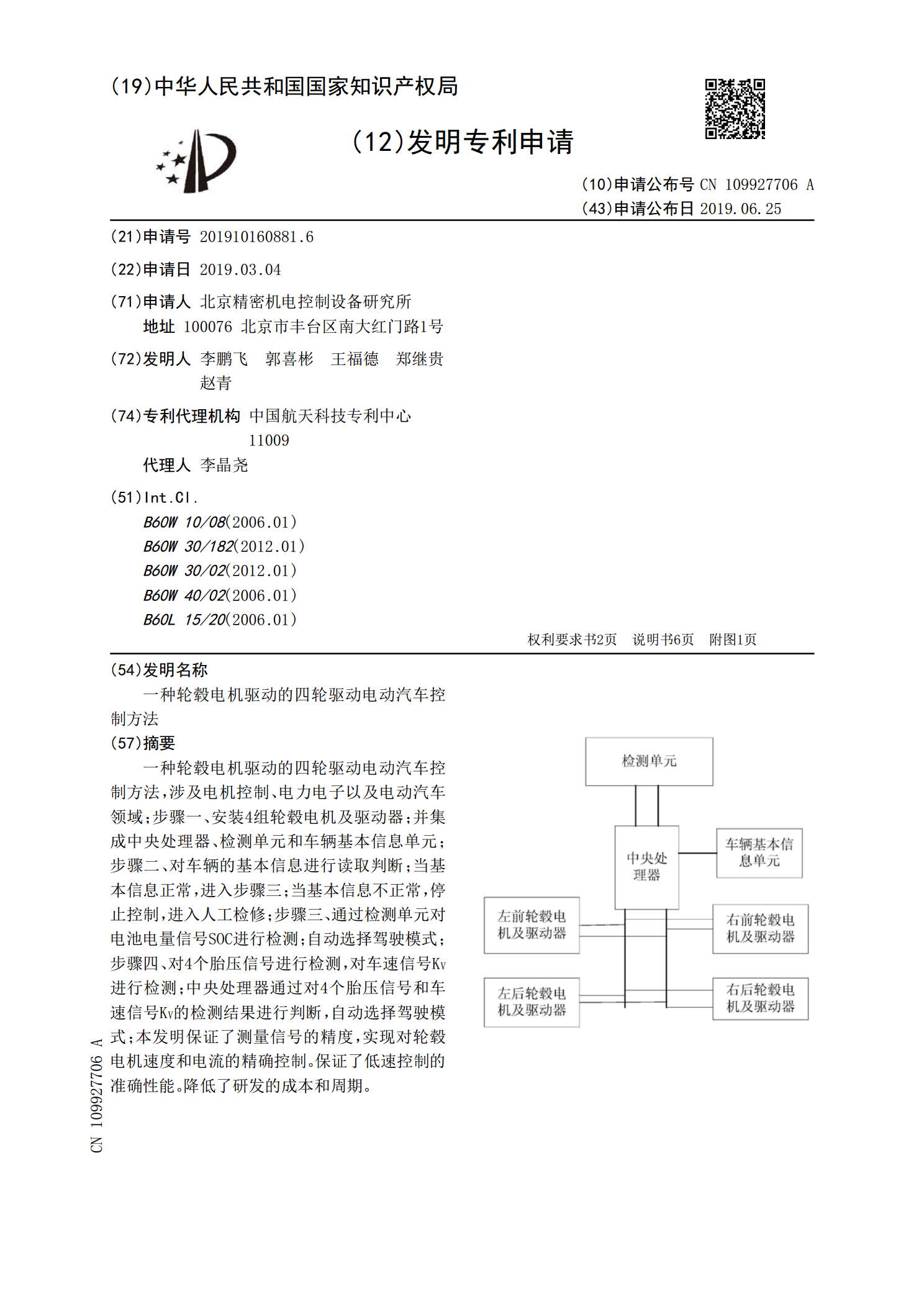
一种轮毂电机驱动的四轮驱动电动汽车控制方法,涉及电机控制、电力电子以及电动汽车领域;步骤一、安装4组轮毂电机及驱动器;并集成中央处理器、检测单元和车辆基本信息单元;步骤二、对车辆的基本信息进行读取判断;当基本信息正常,进入步骤三;当基本信息不正常,停止控制,进入人工检修;步骤三、通过检测单元对电池电量信号SOC进行检测;自动选择驾驶模式;步骤四、对4个胎压信号进行检测,对车速信号K

单电机四轮驱动的电动汽车制动能量回收方法.pdf
本发明公开了一种单电机四轮驱动的电动汽车制动能量回收方法,电动汽车包括整车控制器和一个驱动电机,驱动电机的一端通过前离合器和前驱动减速器相连接,另一端通过后离合器和后驱动减速器相连接,所述前驱动减速器和前轮相连接,后驱动减速器和后轮相连接;该方法包括以下步骤:整车控制器判断电动汽车是否处于制动状态,若判断为电动汽车处于制动状态,则进行制动能量的回收,否则进入正常行驶状态。本发明能够有效实现制动能量的回收,回收效率较高;采用单电机驱动并能够实现四轮驱动模式,大大降低了整车重量和成本,能够更好地将足够的动力传