
一种高压线智能巡检机器人及其巡检方法.pdf

一条****88

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高压线智能巡检机器人及其巡检方法.pdf
本发明公开了一种高压线智能巡检机器人及其巡检方法,该机器人包括移动模块、悬臂、测量模块和控制模块,移动模块包括两个轮组,分别设置在悬臂的两端,高压线穿过两个轮组,测量模块设置在悬臂的最下方,控制模块悬挂在悬臂内弧的最低端,包括机器人控制器、通信模块和电源,机器人通过通信模块与地面终端平台进行数据通信,机器人控制器控制轮组压紧高压线并沿高压线移动,电源为机器人各部件供电。本发明轮组压紧高压线并在电机带动下沿高压线移动,在移动过程中,测量模块进行各种检测,可以实现不间断地对高压线进行自主往返巡检,实现高清检测
一种高压线智能巡检机器人及其使用方法.pdf
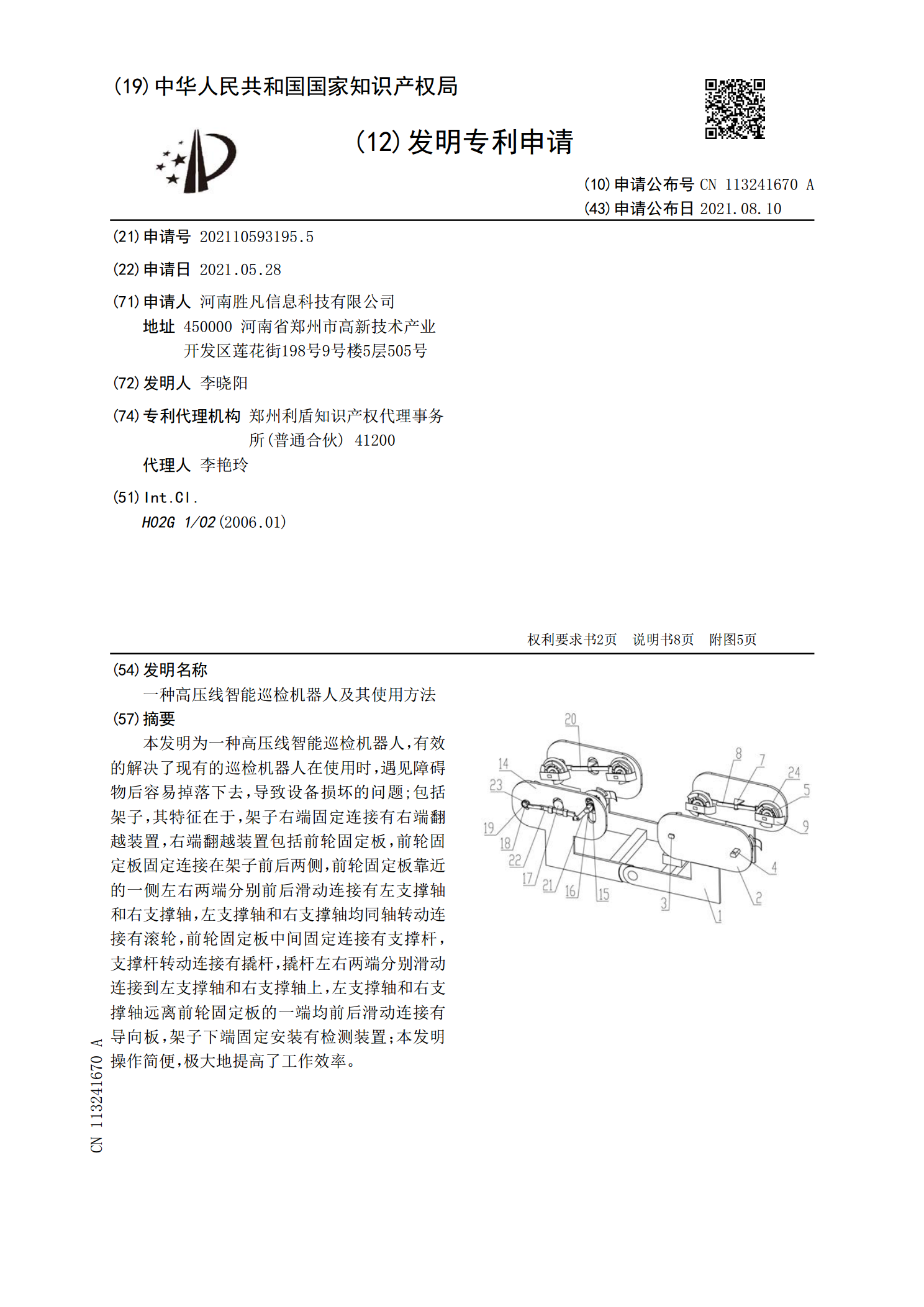
本发明为一种高压线智能巡检机器人,有效的解决了现有的巡检机器人在使用时,遇见障碍物后容易掉落下去,导致设备损坏的问题;包括架子,其特征在于,架子右端固定连接有右端翻越装置,右端翻越装置包括前轮固定板,前轮固定板固定连接在架子前后两侧,前轮固定板靠近的一侧左右两端分别前后滑动连接有左支撑轴和右支撑轴,左支撑轴和右支撑轴均同轴转动连接有滚轮,前轮固定板中间固定连接有支撑杆,支撑杆转动连接有撬杆,撬杆左右两端分别滑动连接到左支撑轴和右支撑轴上,左支撑轴和右支撑轴远离前轮固定板的一端均前后滑动连接有导向板,架子下
一种智能巡检系统及其巡检方法.pdf
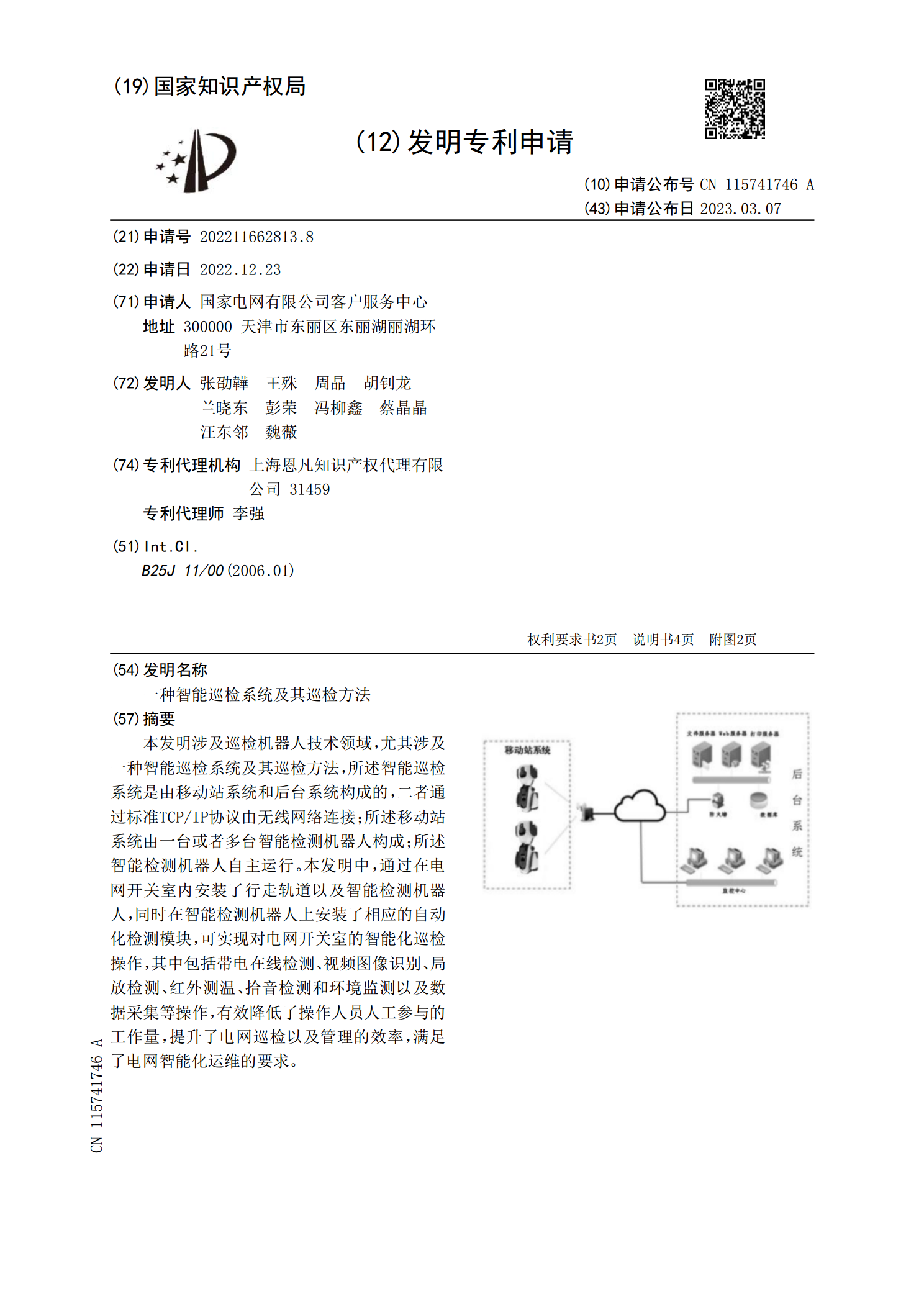
本发明涉及巡检机器人技术领域,尤其涉及一种智能巡检系统及其巡检方法,所述智能巡检系统是由移动站系统和后台系统构成的,二者通过标准TCP/IP协议由无线网络连接;所述移动站系统由一台或者多台智能检测机器人构成;所述智能检测机器人自主运行。本发明中,通过在电网开关室内安装了行走轨道以及智能检测机器人,同时在智能检测机器人上安装了相应的自动化检测模块,可实现对电网开关室的智能化巡检操作,其中包括带电在线检测、视频图像识别、局放检测、红外测温、拾音检测和环境监测以及数据采集等操作,有效降低了操作人员人工参与的工作
一种巡检机器人及其巡检方法.pdf
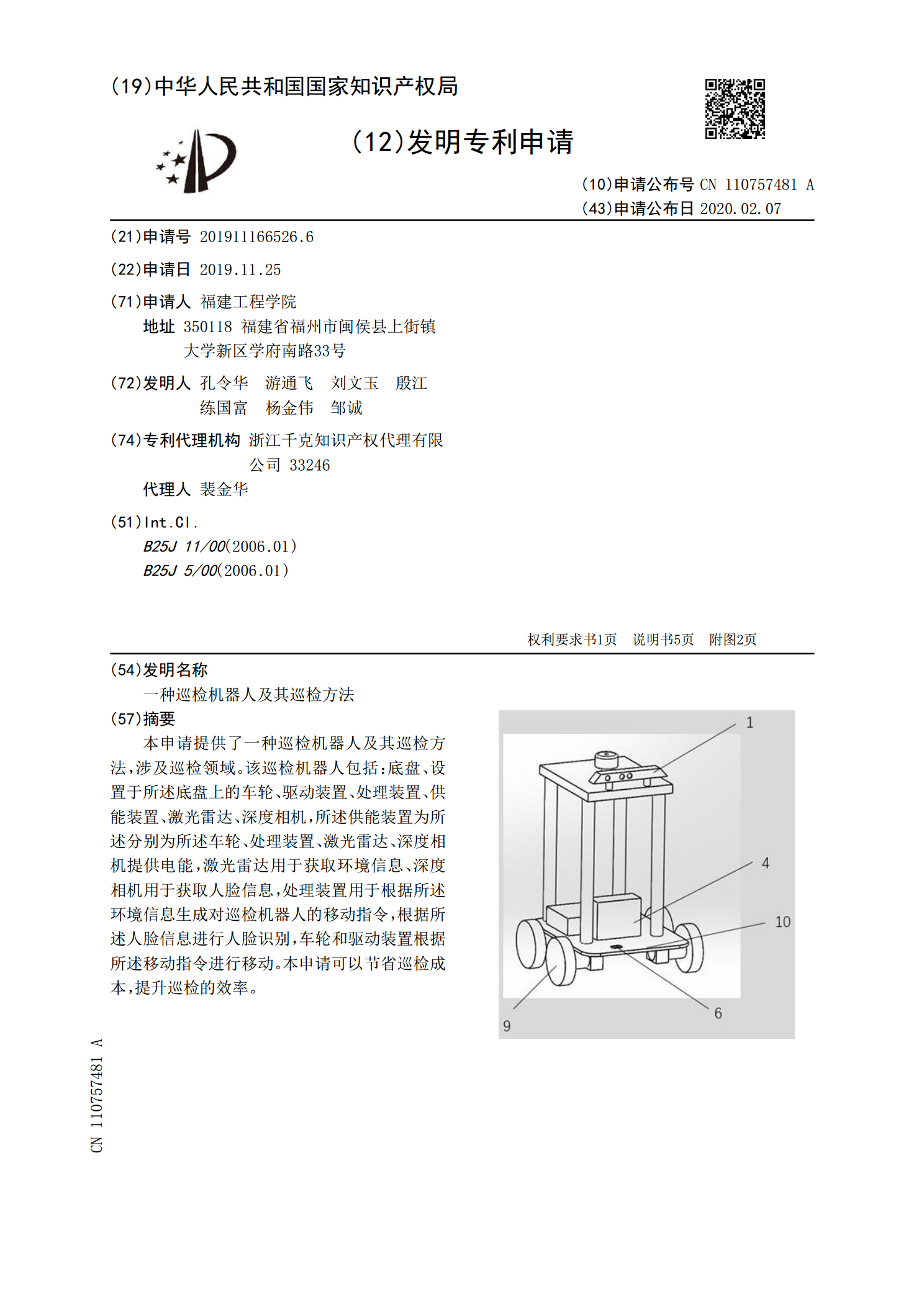
本申请提供了一种巡检机器人及其巡检方法,涉及巡检领域。该巡检机器人包括:底盘、设置于所述底盘上的车轮、驱动装置、处理装置、供能装置、激光雷达、深度相机,所述供能装置为所述分别为所述车轮、处理装置、激光雷达、深度相机提供电能,激光雷达用于获取环境信息、深度相机用于获取人脸信息,处理装置用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮和驱动装置根据所述移动指令进行移动。本申请可以节省巡检成本,提升巡检的效率。

智能巡检机器人及巡检方法.pdf
本发明公开了智能巡检机器人及巡检方法,其中智能巡检机器人,由机器人本体及移动平台、定位导航装置、自动整平装置、测量仪器、图像采集装置、通信装置,内置服务器组成。本发明中,机器人通过定位导航装置按预设路线进行巡检,在预定的不同检测位置停留作业,自整平装置为测量仪器提供严格水平的基础平台,机器人引导测量仪器对管隧道内的棱镜进行测量,并将检测数据进行存储和计算,给出沉降变形测量结果,同时可以给出渗漏水等病害的检测结果,整套装置可替代人工测量,解决管隧道的自动化检测难题、便捷方便、实用性强。