
一种智能巡检系统及其巡检方法.pdf

灵波****ng

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能巡检系统及其巡检方法.pdf
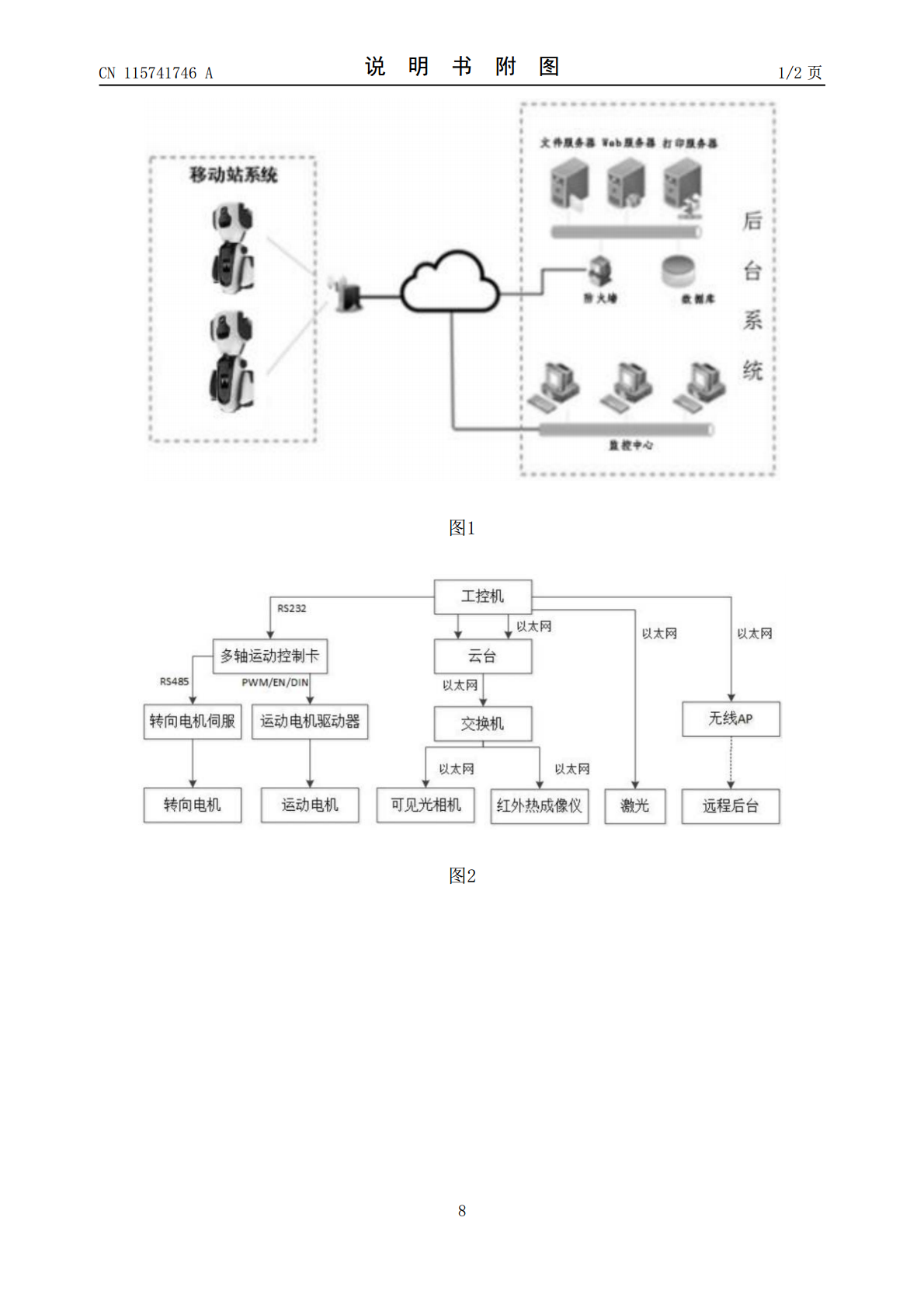
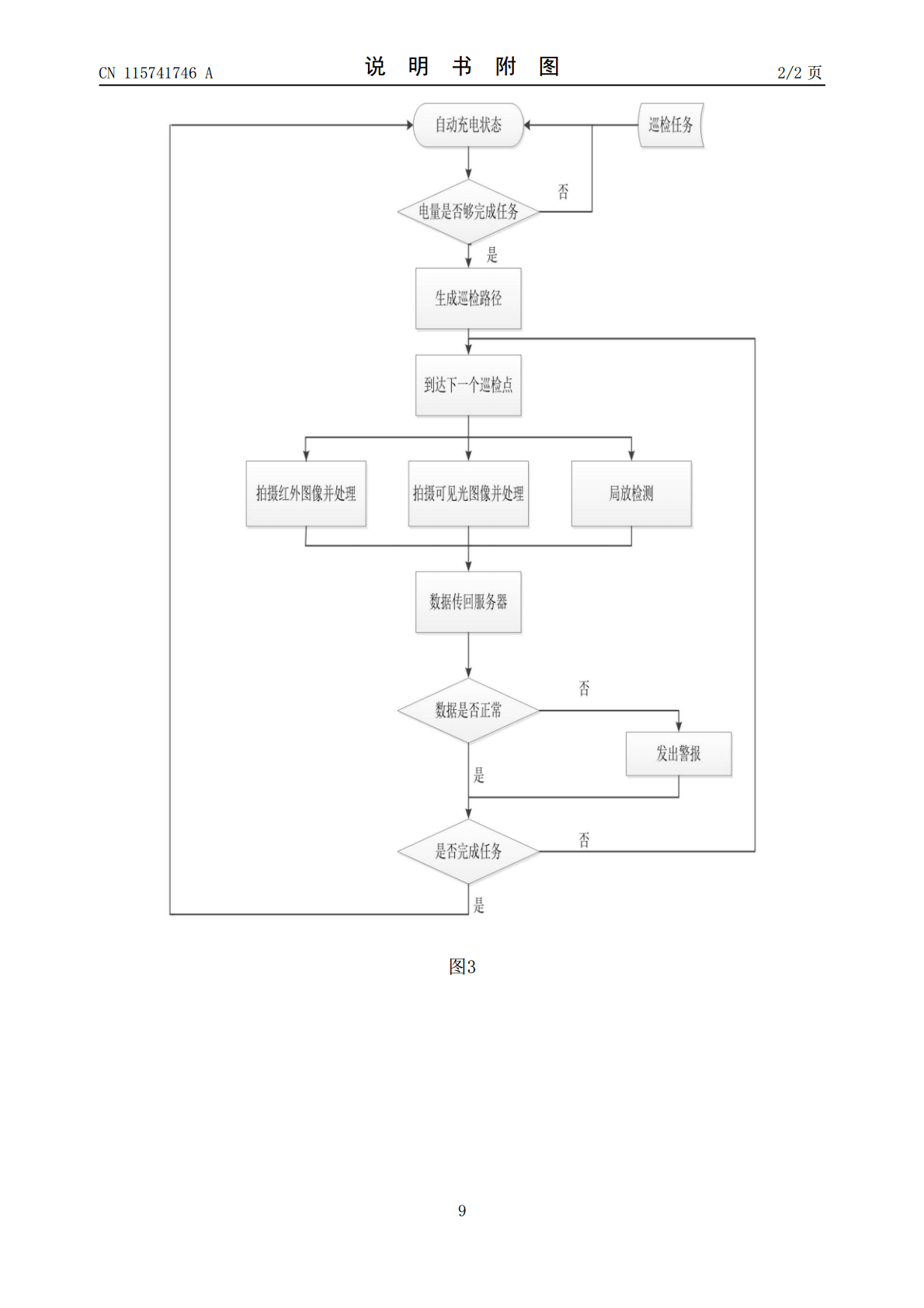
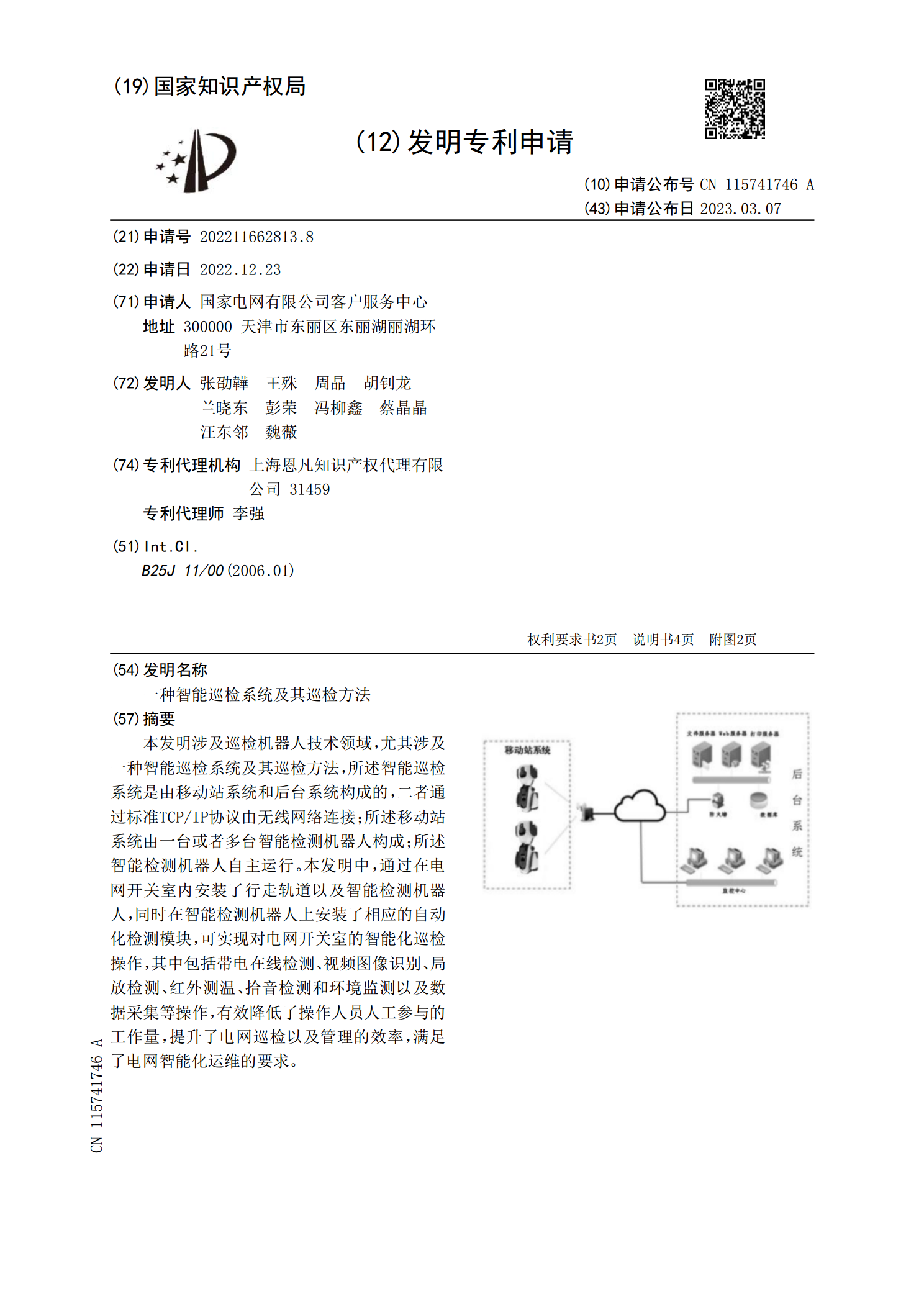
本发明涉及巡检机器人技术领域,尤其涉及一种智能巡检系统及其巡检方法,所述智能巡检系统是由移动站系统和后台系统构成的,二者通过标准TCP/IP协议由无线网络连接;所述移动站系统由一台或者多台智能检测机器人构成;所述智能检测机器人自主运行。本发明中,通过在电网开关室内安装了行走轨道以及智能检测机器人,同时在智能检测机器人上安装了相应的自动化检测模块,可实现对电网开关室的智能化巡检操作,其中包括带电在线检测、视频图像识别、局放检测、红外测温、拾音检测和环境监测以及数据采集等操作,有效降低了操作人员人工参与的工作
一种基于智能手机的灌区智能巡检系统及其巡检方法.pdf
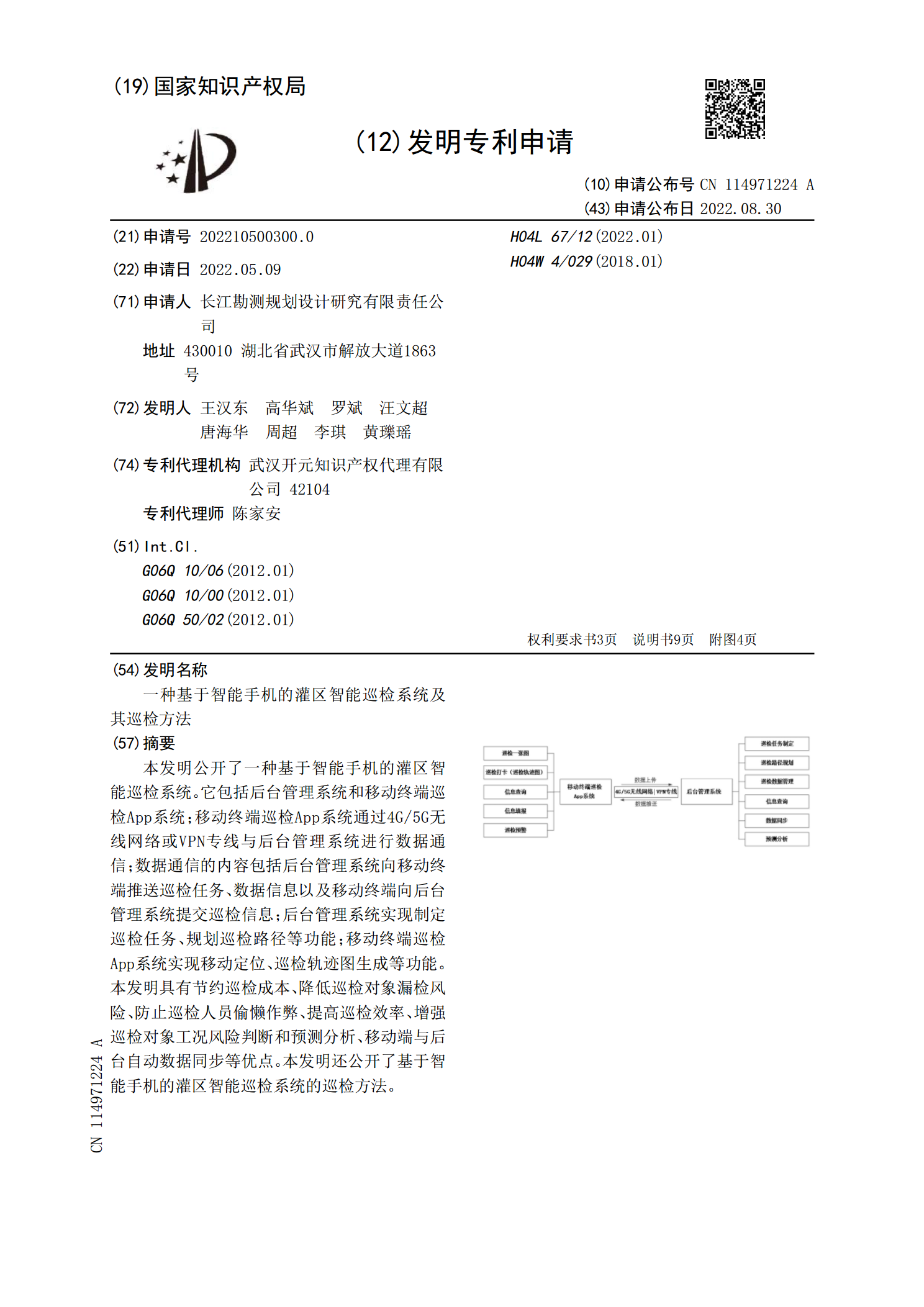
本发明公开了一种基于智能手机的灌区智能巡检系统。它包括后台管理系统和移动终端巡检App系统;移动终端巡检App系统通过4G/5G无线网络或VPN专线与后台管理系统进行数据通信;数据通信的内容包括后台管理系统向移动终端推送巡检任务、数据信息以及移动终端向后台管理系统提交巡检信息;后台管理系统实现制定巡检任务、规划巡检路径等功能;移动终端巡检App系统实现移动定位、巡检轨迹图生成等功能。本发明具有节约巡检成本、降低巡检对象漏检风险、防止巡检人员偷懒作弊、提高巡检效率、增强巡检对象工况风险判断和预测分析、移动端
煤化工智能巡检机器人、智能巡检系统及巡检方法.pdf
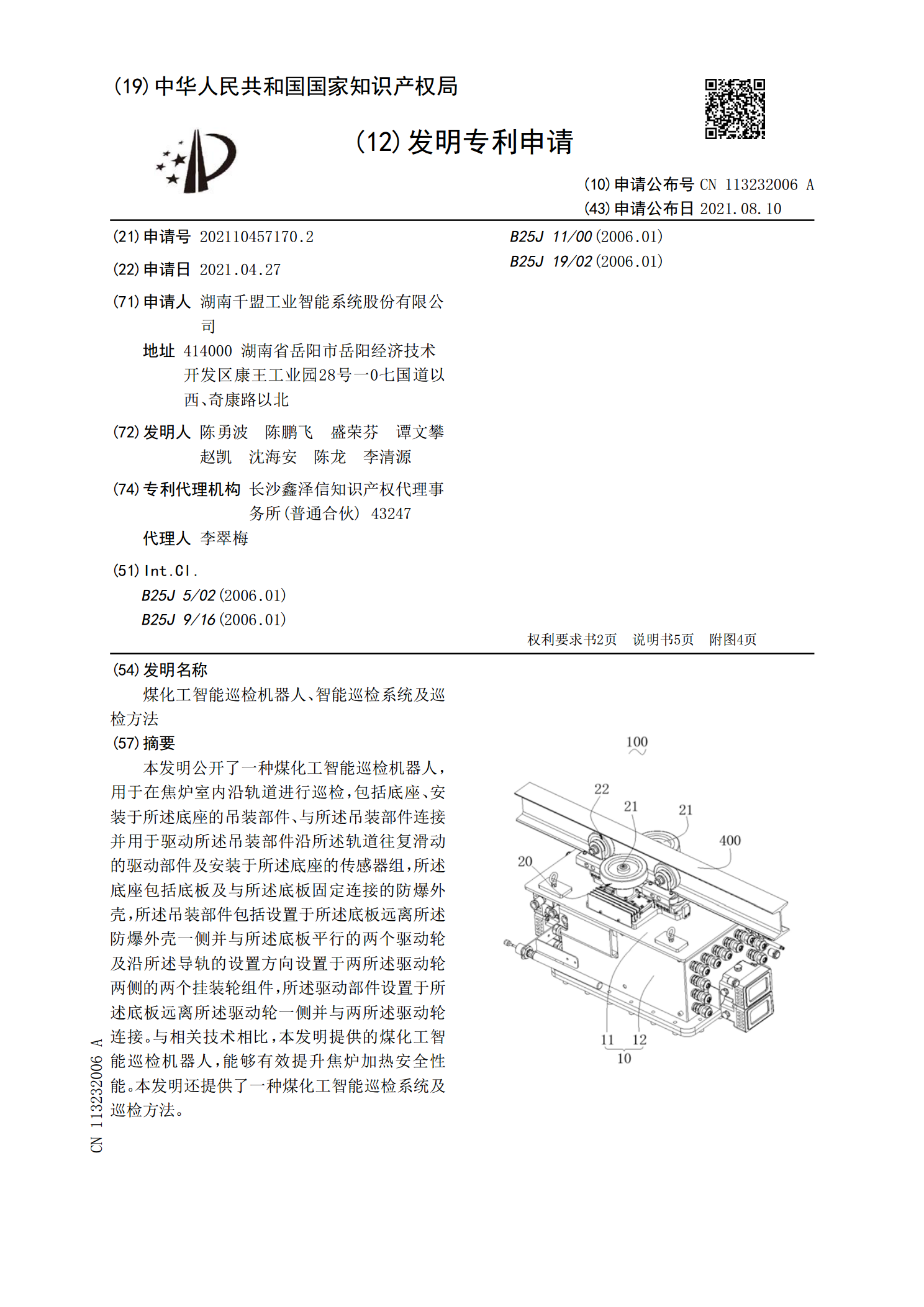
本发明公开了一种煤化工智能巡检机器人,用于在焦炉室内沿轨道进行巡检,包括底座、安装于所述底座的吊装部件、与所述吊装部件连接并用于驱动所述吊装部件沿所述轨道往复滑动的驱动部件及安装于所述底座的传感器组,所述底座包括底板及与所述底板固定连接的防爆外壳,所述吊装部件包括设置于所述底板远离所述防爆外壳一侧并与所述底板平行的两个驱动轮及沿所述导轨的设置方向设置于两所述驱动轮两侧的两个挂装轮组件,所述驱动部件设置于所述底板远离所述驱动轮一侧并与两所述驱动轮连接。与相关技术相比,本发明提供的煤化工智能巡检机器人,能够有
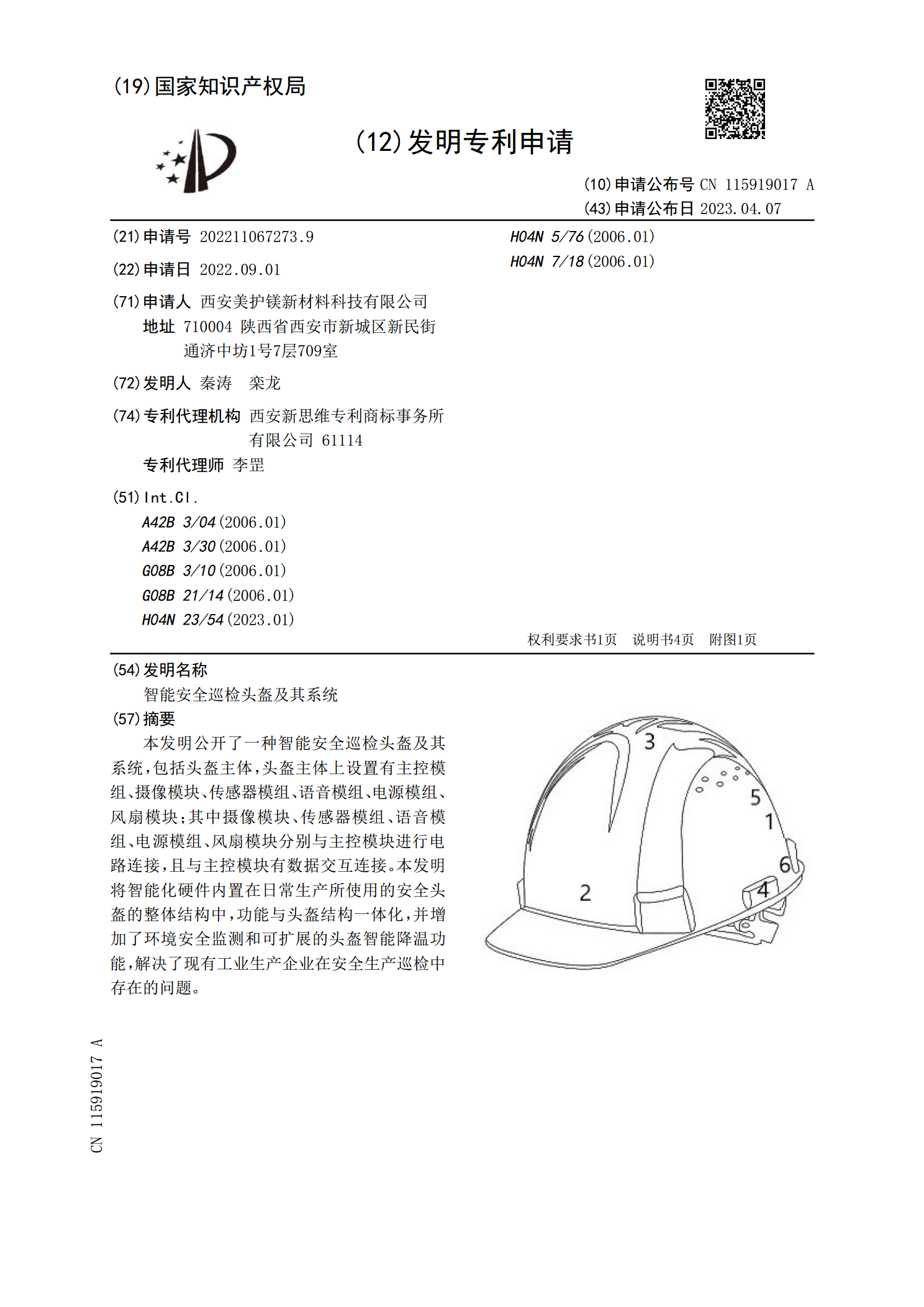
智能安全巡检头盔及其系统.pdf
本发明公开了一种智能安全巡检头盔及其系统,包括头盔主体,头盔主体上设置有主控模组、摄像模块、传感器模组、语音模组、电源模组、风扇模块;其中摄像模块、传感器模组、语音模组、电源模组、风扇模块分别与主控模块进行电路连接,且与主控模块有数据交互连接。本发明将智能化硬件内置在日常生产所使用的安全头盔的整体结构中,功能与头盔结构一体化,并增加了环境安全监测和可扩展的头盔智能降温功能,解决了现有工业生产企业在安全生产巡检中存在的问题。
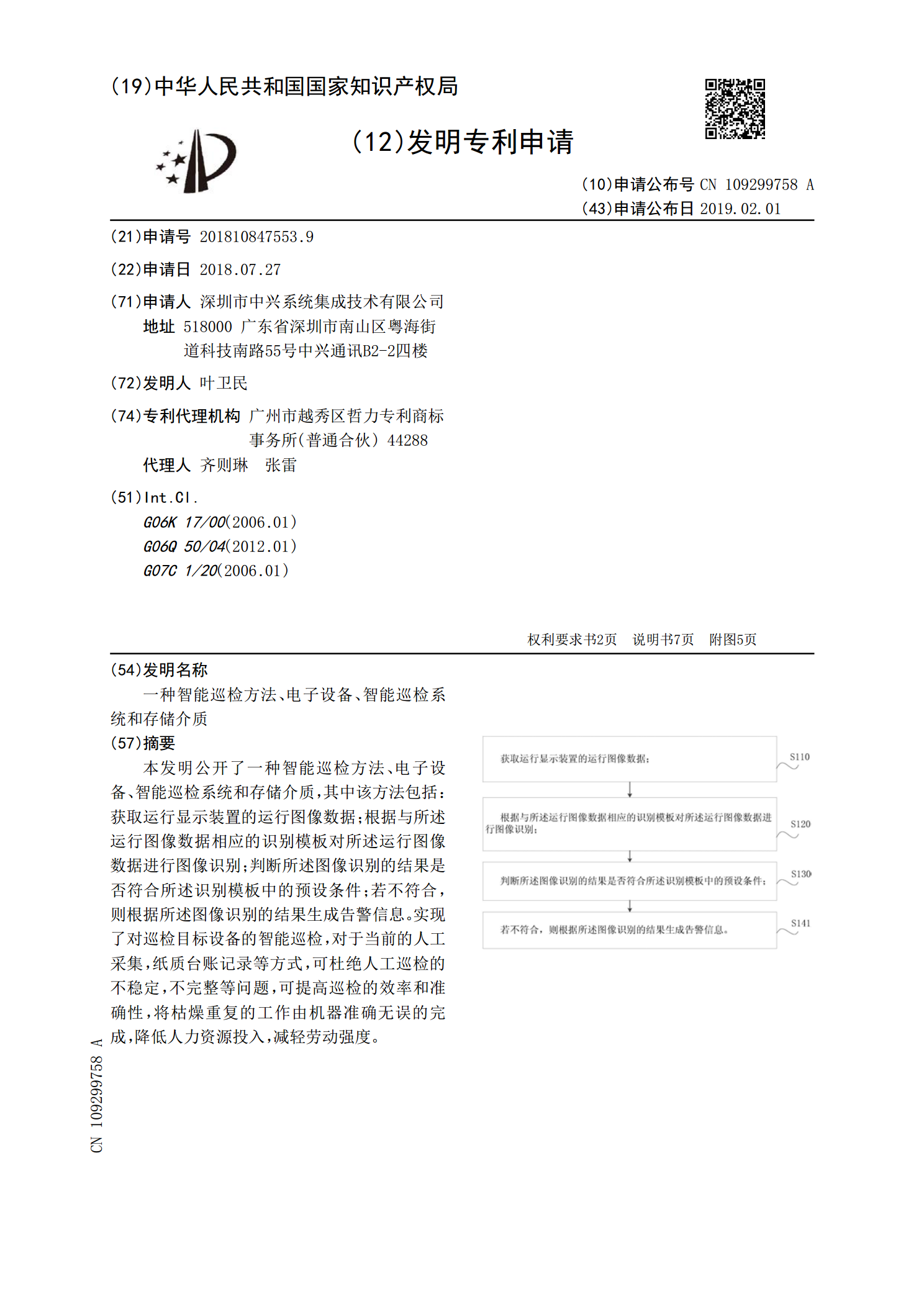
一种智能巡检方法、电子设备、智能巡检系统和存储介质.pdf
本发明公开了一种智能巡检方法、电子设备、智能巡检系统和存储介质,其中该方法包括:获取运行显示装置的运行图像数据;根据与所述运行图像数据相应的识别模板对所述运行图像数据进行图像识别;判断所述图像识别的结果是否符合所述识别模板中的预设条件;若不符合,则根据所述图像识别的结果生成告警信息。实现了对巡检目标设备的智能巡检,对于当前的人工采集,纸质台账记录等方式,可杜绝人工巡检的不稳定,不完整等问题,可提高巡检的效率和准确性,将枯燥重复的工作由机器准确无误的完成,降低人力资源投入,减轻劳动强度。