
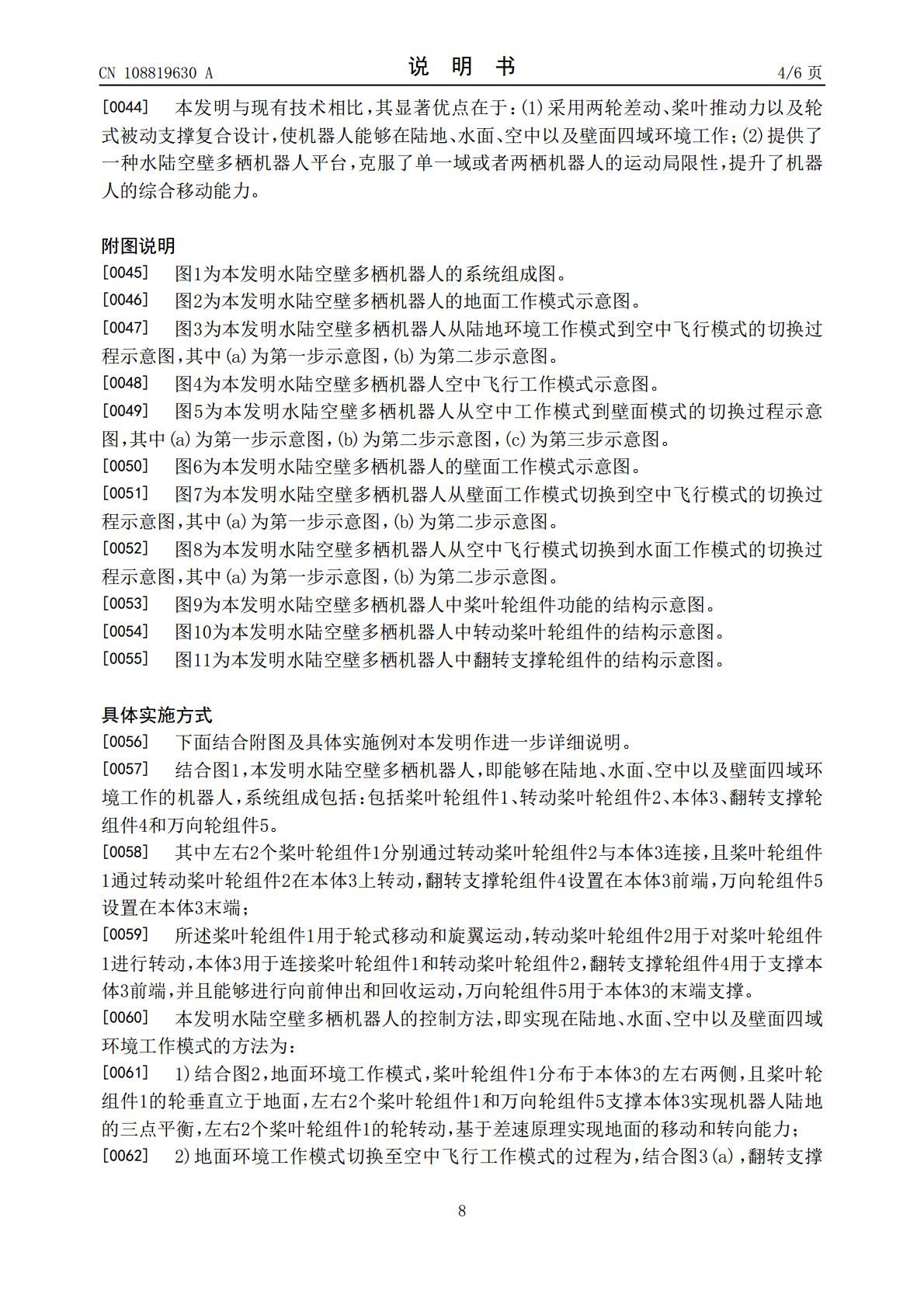
一种水陆空壁多栖机器人及其控制方法.pdf

冷霜****魔王

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水陆空壁多栖机器人及其控制方法.pdf
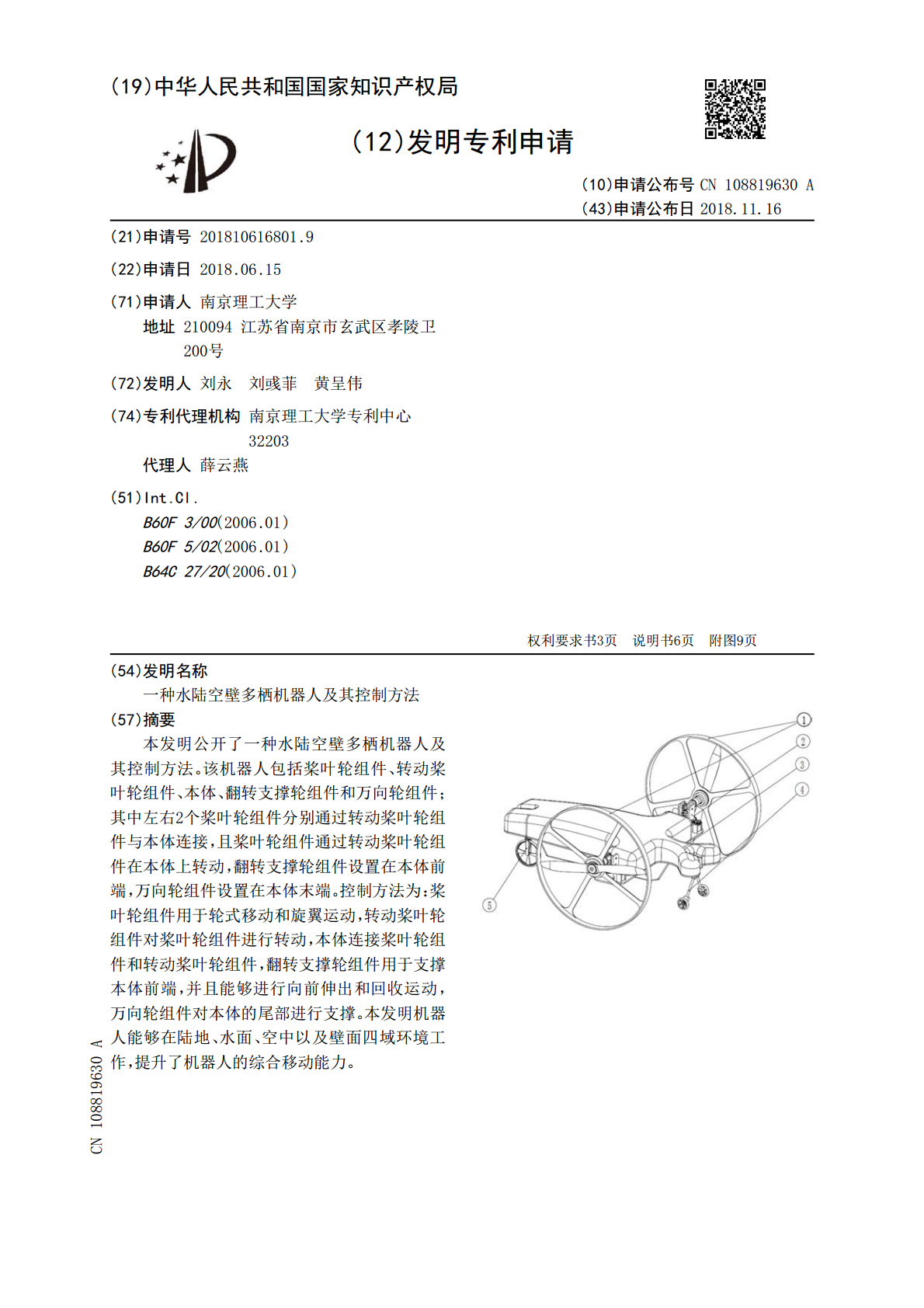
本发明公开了一种水陆空壁多栖机器人及其控制方法。该机器人包括桨叶轮组件、转动桨叶轮组件、本体、翻转支撑轮组件和万向轮组件;其中左右2个桨叶轮组件分别通过转动桨叶轮组件与本体连接,且桨叶轮组件通过转动桨叶轮组件在本体上转动,翻转支撑轮组件设置在本体前端,万向轮组件设置在本体末端。控制方法为:桨叶轮组件用于轮式移动和旋翼运动,转动桨叶轮组件对桨叶轮组件进行转动,本体连接桨叶轮组件和转动桨叶轮组件,翻转支撑轮组件用于支撑本体前端,并且能够进行向前伸出和回收运动,万向轮组件对本体的尾部进行支撑。本发明机器人能够在
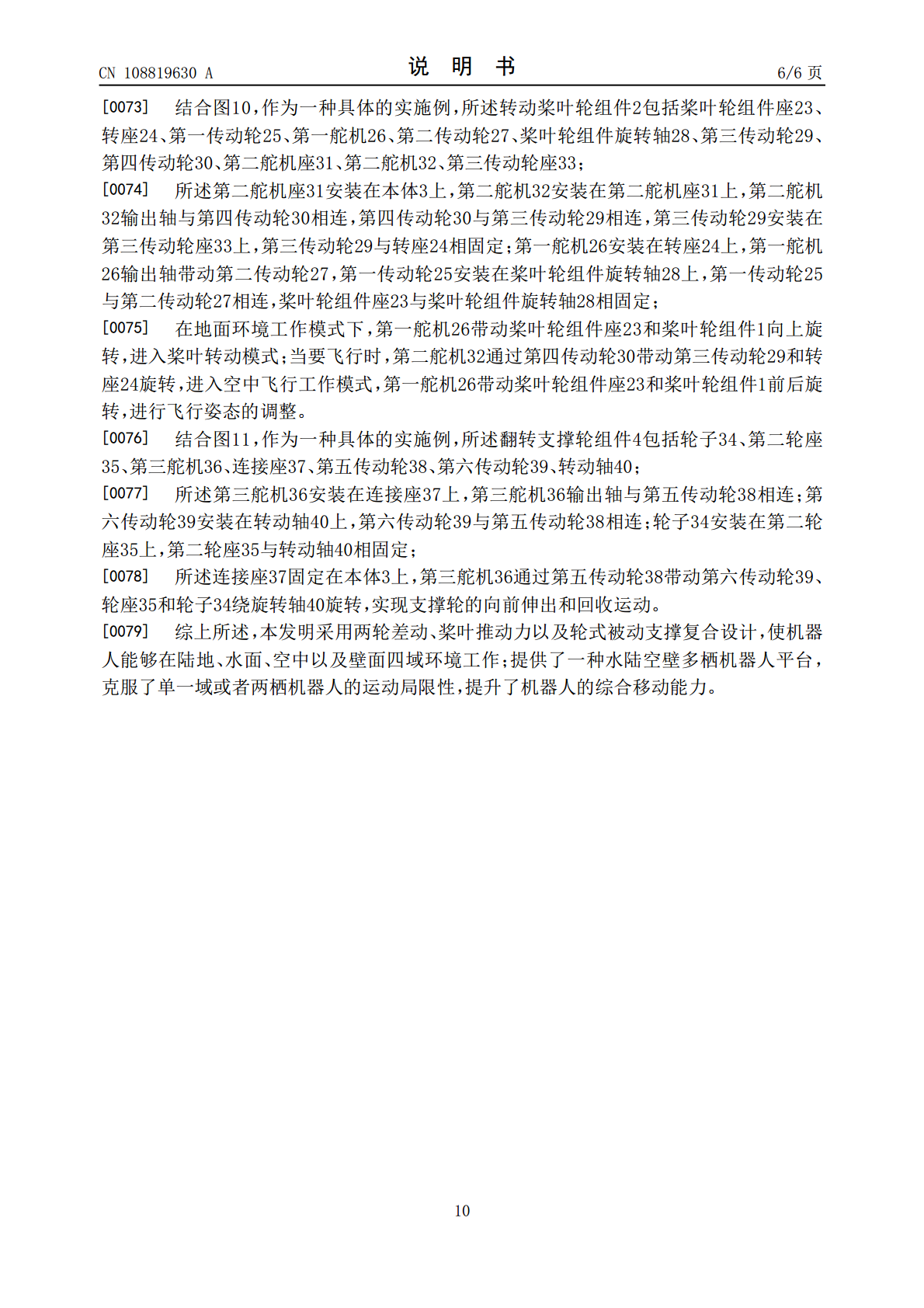
一种两旋翼平衡车水陆空多栖机器人及其控制方法.pdf
本发明公开了一种两旋翼平衡车水陆空多栖机器人及其控制方法。该多栖机器人包括旋翼轮组件、转动旋翼组件和本体,左右个旋翼轮组件分别通过转动旋翼组件与本体连接,且旋翼轮组件通过转动旋翼组件在本体上转动。控制方法为:若在地面工作模式,遇到障碍则决策切换为飞行工作模式;越过障碍后,决策从飞行工作模式切换为地面工作模式;若遇到水坑或者湖面,则决策从地面工作模式或者飞行工作模式切换到水面工作模式;若在飞行过程中遇到强风的情形,则决策从飞行工作模式切换到地面工作模式。本发明采用轮模式和旋翼模式共享设计,实现了地面移动、空
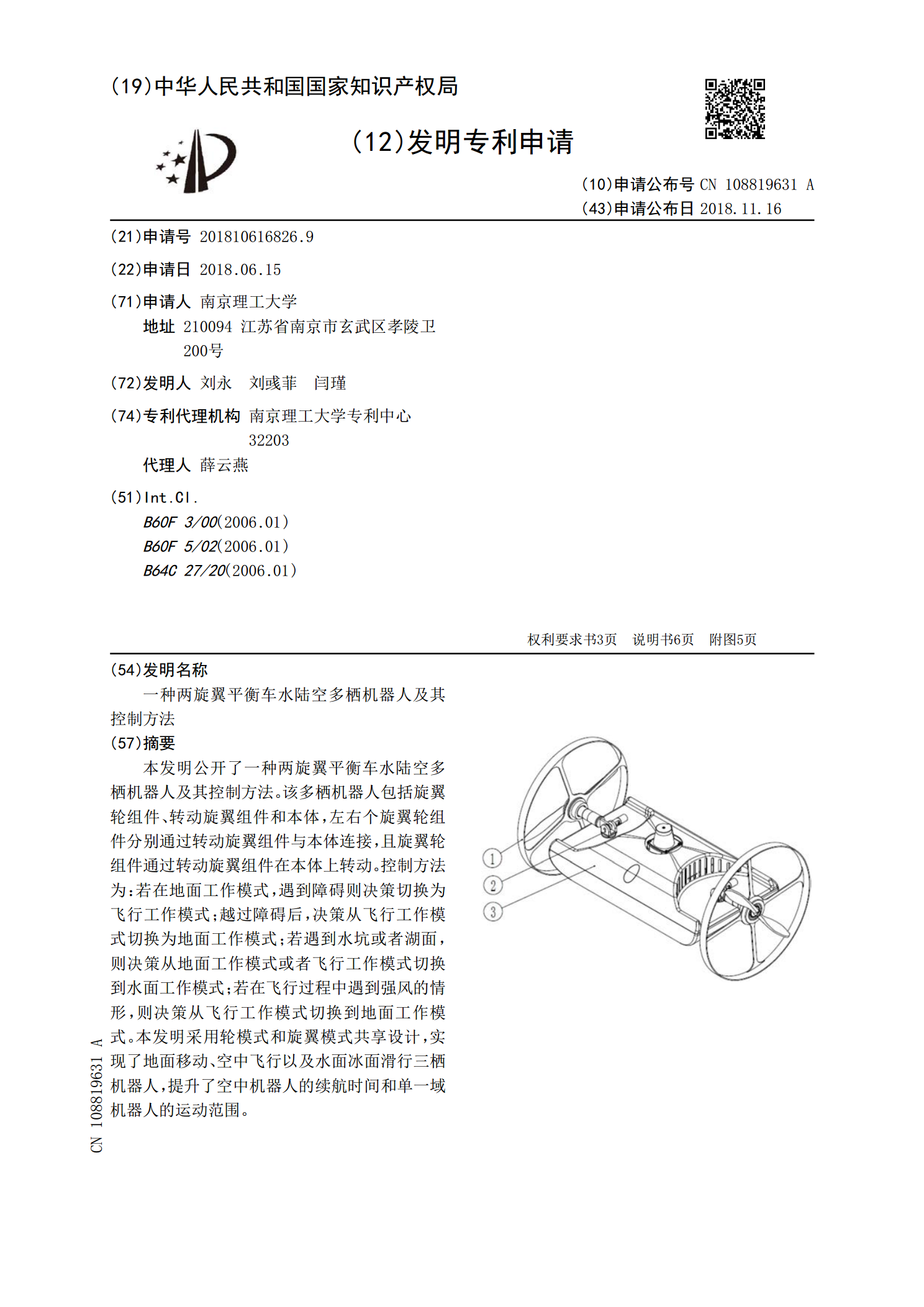
一种水陆空三栖旋翼机器人及其工作方法.pdf
本发明公开了一种水陆空三栖旋翼机器人及其工作方法。该机器人包括:主体底板;四个旋翼模块,对称设置在主体底板的四角处,接受电控模块的控制,旋翼模块包括旋翼、陆行轮以及驱动旋翼、陆行轮工作的驱动机构;四个变形模块,分别与四个旋翼模块一一对应,对称设置在主体底板的四角处,用于驱动对应旋翼模块在竖直方向旋转,接受电控模块的控制;电控模块,设置在主体底板上,为三栖旋翼机器人提供电能和控制信号。本发明能够在水陆空三种工作环境下随意切换、快速展开工作。
一种水陆空多栖通行机.pdf
本发明公开了一种水陆空多栖通行机,包括机舱和浮力平台,所述浮力平台下侧安装有行走轮;所述机舱包括上舱和下舱,所述下舱中设置有升力单体和推力单体,所述升力单体包括多层升力导板和升力动力单元,所述推力单体包括多层推力导板和推力动力单元;空气沿多栖通行机的运行方向进入所述升力单体和/或推力单体,所述升力导板和推力导板沿阻碍空气流动的方向倾斜。发明所提供的水陆空多栖通行机效率高、实用性强且适用性广。

气动多囊式软体爬壁机器人及其控制方法.pdf
本发明提供了一种气动多囊式软体爬壁机器人及其控制方法,包括:吸附部件、气囊部件、充放气部件以及气动供给部件;所述吸附部件位于气囊部件内部,所述气动供给部件通过充放气部件给气囊部件充气,使得气囊部件的不同部分处于充气状态或者放气状态,通过改变气囊部件不同部分的充放气状态实现对应吸附部件与支撑物之间的吸附和分离,并配合吸附部件的吸附和分离动作完成指定的运动。本发明打破爬壁机器人刚体结构的传统,将新型软体机器人赋予爬壁功能,结构简单,自由度高,能够实现前进、后退、转弯、曲面爬行等运动方式。