
一种两旋翼平衡车水陆空多栖机器人及其控制方法.pdf

永香****能手

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种两旋翼平衡车水陆空多栖机器人及其控制方法.pdf
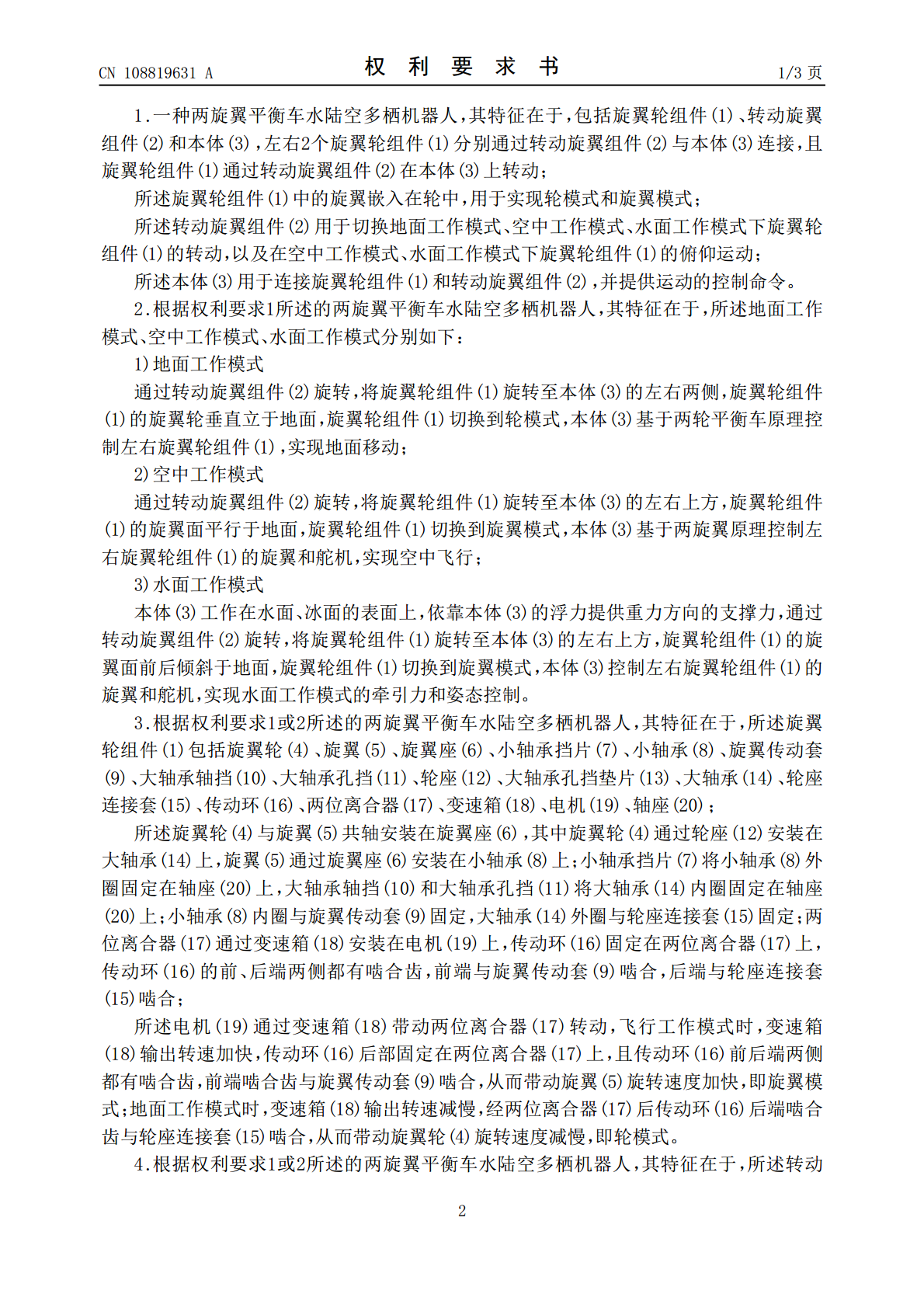
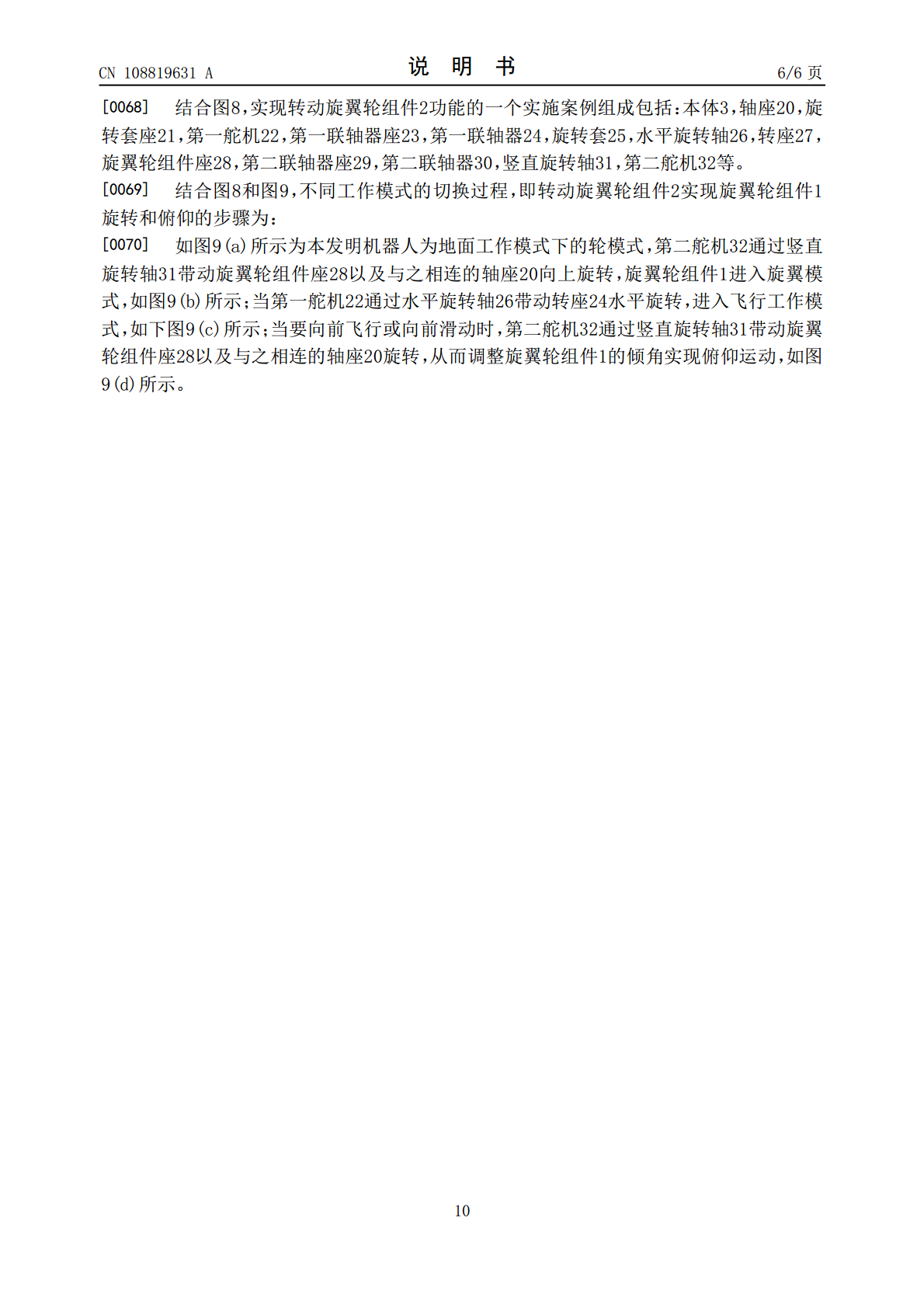
本发明公开了一种两旋翼平衡车水陆空多栖机器人及其控制方法。该多栖机器人包括旋翼轮组件、转动旋翼组件和本体,左右个旋翼轮组件分别通过转动旋翼组件与本体连接,且旋翼轮组件通过转动旋翼组件在本体上转动。控制方法为:若在地面工作模式,遇到障碍则决策切换为飞行工作模式;越过障碍后,决策从飞行工作模式切换为地面工作模式;若遇到水坑或者湖面,则决策从地面工作模式或者飞行工作模式切换到水面工作模式;若在飞行过程中遇到强风的情形,则决策从飞行工作模式切换到地面工作模式。本发明采用轮模式和旋翼模式共享设计,实现了地面移动、空

一种水陆空壁多栖机器人及其控制方法.pdf
本发明公开了一种水陆空壁多栖机器人及其控制方法。该机器人包括桨叶轮组件、转动桨叶轮组件、本体、翻转支撑轮组件和万向轮组件;其中左右2个桨叶轮组件分别通过转动桨叶轮组件与本体连接,且桨叶轮组件通过转动桨叶轮组件在本体上转动,翻转支撑轮组件设置在本体前端,万向轮组件设置在本体末端。控制方法为:桨叶轮组件用于轮式移动和旋翼运动,转动桨叶轮组件对桨叶轮组件进行转动,本体连接桨叶轮组件和转动桨叶轮组件,翻转支撑轮组件用于支撑本体前端,并且能够进行向前伸出和回收运动,万向轮组件对本体的尾部进行支撑。本发明机器人能够在

一种三旋翼轮式水陆空三栖机器人.pdf
本发明公开了一种三旋翼轮式水陆空三栖机器人。该机器人包括旋转翼组件、驱动轮组件、本体、调节翼组件、调压组件、万向轮、控制系统及传感器;所述旋转翼组件、调节翼组件均安装在本体上;驱动轮组件安装在本体左右两侧;调压组件安装在本体底部,通过控制本体体积的变化调节浮力大小;万向轮设置在本体末端;所述控制系统及各种传感器安装在本体上,用于多栖机器人的环境采集及控制;地面模式时三旋翼的两个旋翼自动折叠,另一个旋翼通过变结构提供地面辅助牵引力;水中模式时通过调压组件和其中两个旋翼控制潜水深度;空中模式时通过三个旋翼和两

水陆空三栖多旋翼飞行器.pdf
本发明提供了一种水陆空三栖多旋翼飞行器,包括机身、悬臂、旋翼部和尾轮部;其中,所述悬臂的一端连接所述机身,所述旋翼部和所述尾轮部设置在所述悬臂另一端的端部;所述旋翼部设置在所述悬臂的上侧;所述尾轮部设置在所述悬臂的下侧;所述悬臂的数量为多个;所述旋翼部和所述尾轮部的数量与所述悬臂的数量一一对应;多个所述悬臂以所述机身的中心呈中心对称分布,以所述机身的轴线呈轴对称分布或沿所述机身的周向均匀分布。本发明通过组合旋翼部和尾轮部,从而能够实现空中飞行、地面滑行和水上滑行三种不同运动方式。
一种单旋翼轮足式多栖机器人.pdf
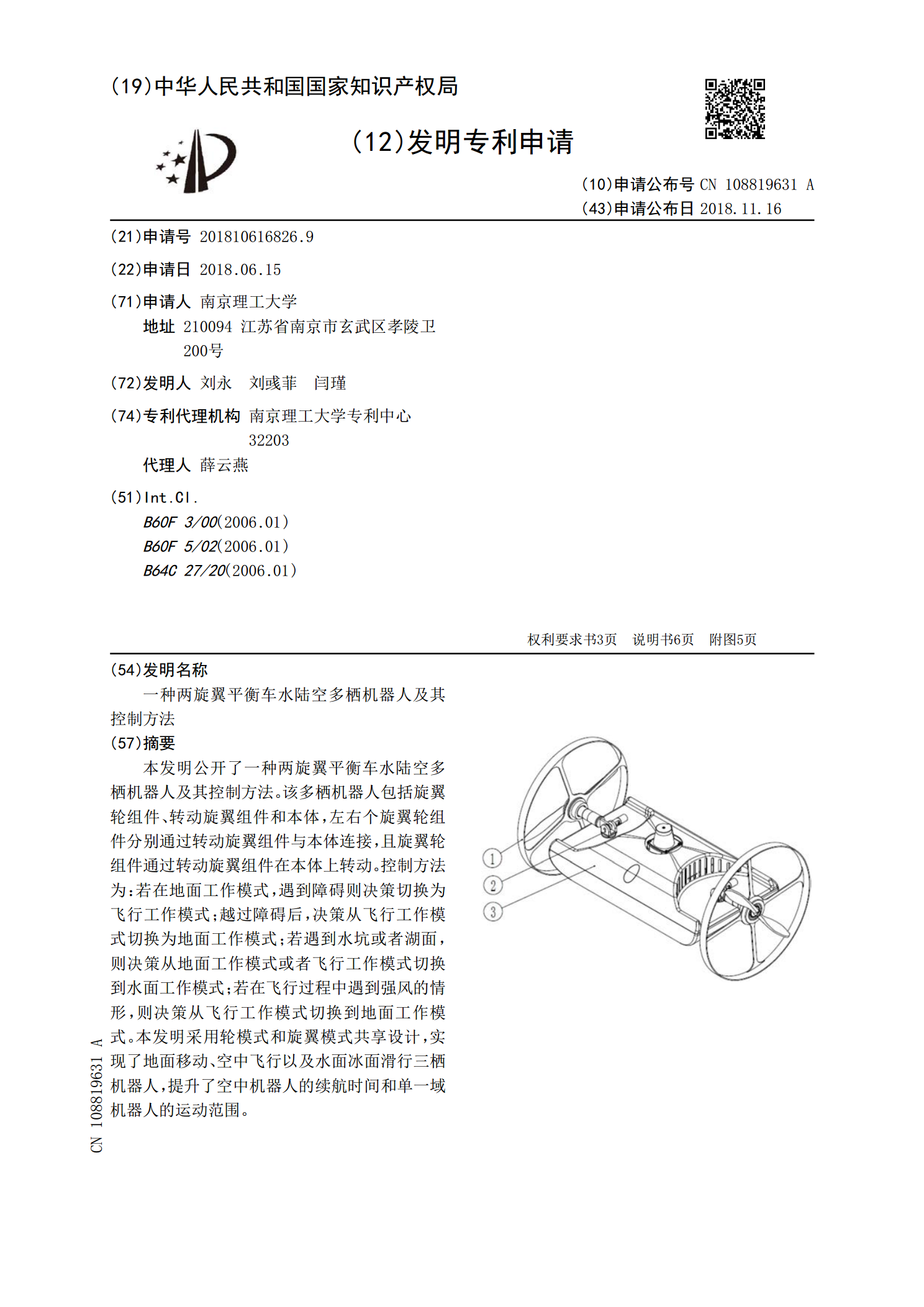
本发明公开了一种单旋翼轮足式多栖机器人,包括左右轮足组件、左右小腿组件、左右大腿组件以及旋翼组件;所述左右轮足组件分别连接在左右小腿组件的下端,所述左右小腿组件连接在左右大腿组件的下部并可伸缩,所述左右大腿组件的上端连接在一支撑板上,所述旋翼组件安装在该支撑板之上;由于在轮足组件的基础上采用了旋翼组件,结合可伸缩的小腿组件,由此可根据不同的场景地形选择不同的行进方式,结构简单、成本低廉、控制容易,且能承受较大负载。