
轮履复合式巡检机器人行走机构及其工作方法.pdf

St****36


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮履复合式巡检机器人行走机构及其工作方法.pdf
本发明公开了一种轮履复合式巡检机器人行走机构,它是在主体履带机构前部还安装有摆臂履带机构和行走轮机构;其中摆臂履带机构由安装在主体履带机构架体上的摆臂轴和摆臂电机以及安装在摆臂轴两端的左、右履带臂组成,摆臂电机通过摆臂减速器驱动摆臂轴转动,摆臂轴带动左、右履带臂上下摆动;行走轮机构,包括安装在主体履带机构底面中心线上的万向轮和左、右行走轮,构成三轮的行走方式。本发明采用新型轮履复合式移动机构,可以实现完全独立的履带移动和轮式移动,且两种运动方式互不干扰,充分发挥了轮式移动的灵活性和履带式移动的越障性能强等
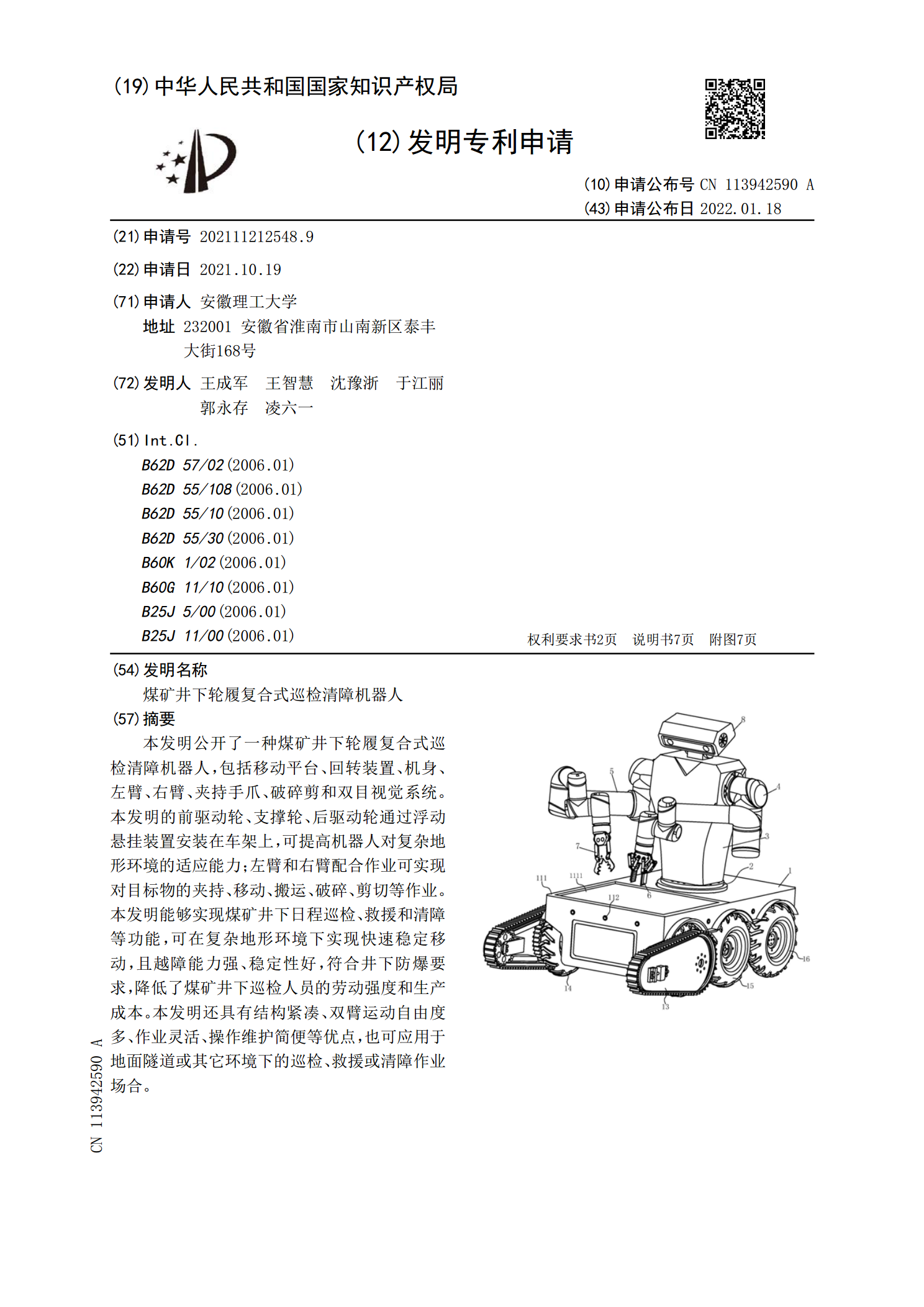
煤矿井下轮履复合式巡检清障机器人.pdf
本发明公开了一种煤矿井下轮履复合式巡检清障机器人,包括移动平台、回转装置、机身、左臂、右臂、夹持手爪、破碎剪和双目视觉系统。本发明的前驱动轮、支撑轮、后驱动轮通过浮动悬挂装置安装在车架上,可提高机器人对复杂地形环境的适应能力;左臂和右臂配合作业可实现对目标物的夹持、移动、搬运、破碎、剪切等作业。本发明能够实现煤矿井下日程巡检、救援和清障等功能,可在复杂地形环境下实现快速稳定移动,且越障能力强、稳定性好,符合井下防爆要求,降低了煤矿井下巡检人员的劳动强度和生产成本。本发明还具有结构紧凑、双臂运动自由度多、作

巡检机器人及其行走机构.pdf
本发明公开了一种行走机构,其传动轴的中部同轴套装有轴承座和减速箱,传动轴的一侧平行设置有电机减速器,电机减速器的输出端设置有与其同轴联动的第一齿轮,传动轴上同轴套装有与第一齿轮相啮合的第二齿轮;传动轴的中部同轴套装有与轴承座相适配的第一圆锥滚子轴承,传动轴的内端部同轴套装有第二圆锥滚子轴承;传动轴的中部分别同轴套装有与轴承座相适配的第一深沟球轴承、与减速箱的外端板相适配的第二深沟球轴承,传动轴的内端部分别同轴套装有与减速箱的内端板相适配的第三深沟球轴承和第四深沟球轴承。该行走机构能够使得巡检机器人的转向和

轮履复合式巡检机器人机械系统研究.docx
轮履复合式巡检机器人机械系统研究论文标题:轮履复合式巡检机器人机械系统研究摘要:随着工业智能化的不断推进,机器人在工业领域中发挥着越来越重要的作用。轮履复合式巡检机器人是一种新型智能机器人,其具备轮式和履带式两种行走模式,能够在不同地形环境中实施巡检任务。本文旨在研究轮履复合式巡检机器人的机械系统,通过分析其结构和工作原理,优化设计以提升巡检效率和性能。实验结果表明,轮履复合式巡检机器人具备较好的行走性能和适应能力,适用于多种工业环境。关键词:轮履复合式机器人;巡检;机械系统;行走性能;适应能力第1节引言

轮爪复合式机器人的行走机构.pdf
轮爪复合式机器人的行走机构,涉及一种水田运输或者种植机械的行走机构,包括车轮和带动车轮行走的驱动机构,在车轮的外侧以轮轴为中心线沿圆周方向对称设有多组爪叶,每两个对称设置的爪叶均连接在爪叶伸缩机构上,所述的爪叶伸缩机构主要由轮爪轴、滑套和连杆组成,轮爪轴的一端通过连接套筒与轮轴相连接,并以定位销固定,轮爪轴另一端悬空,在轮爪轴上套设有滑套,爪叶的一端与轮爪轴以铰链连接,爪叶的中部与连杆的一端呈铰链连接,连杆的另一端与滑套以铰链连接。本装置一方面减少车轮对水稻田土壤的压实,另一方面可以在水稻田中快速行走,使