
一种全地形轮履复合式行走机构.pdf

悠柔****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全地形轮履复合式行走机构.pdf
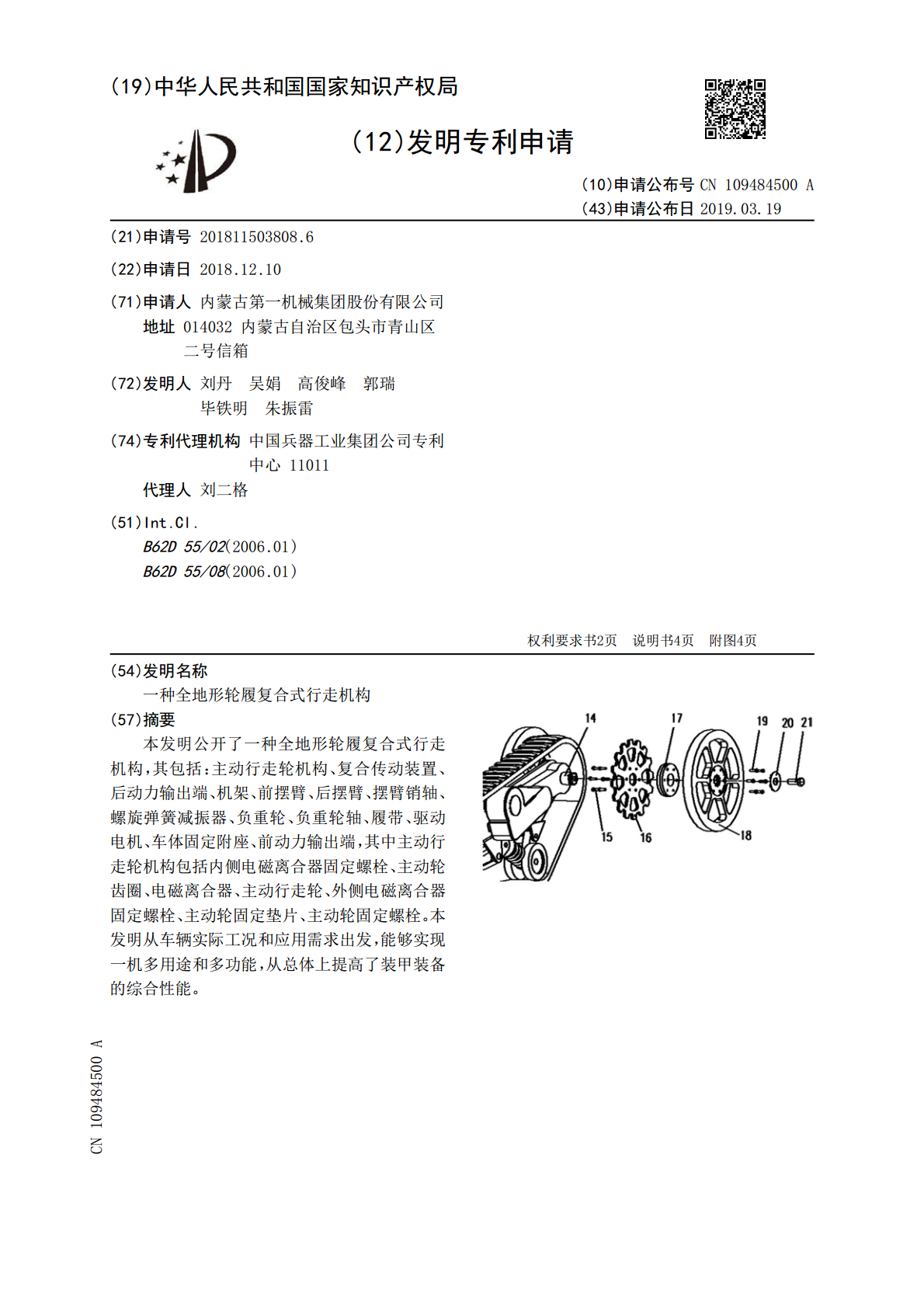
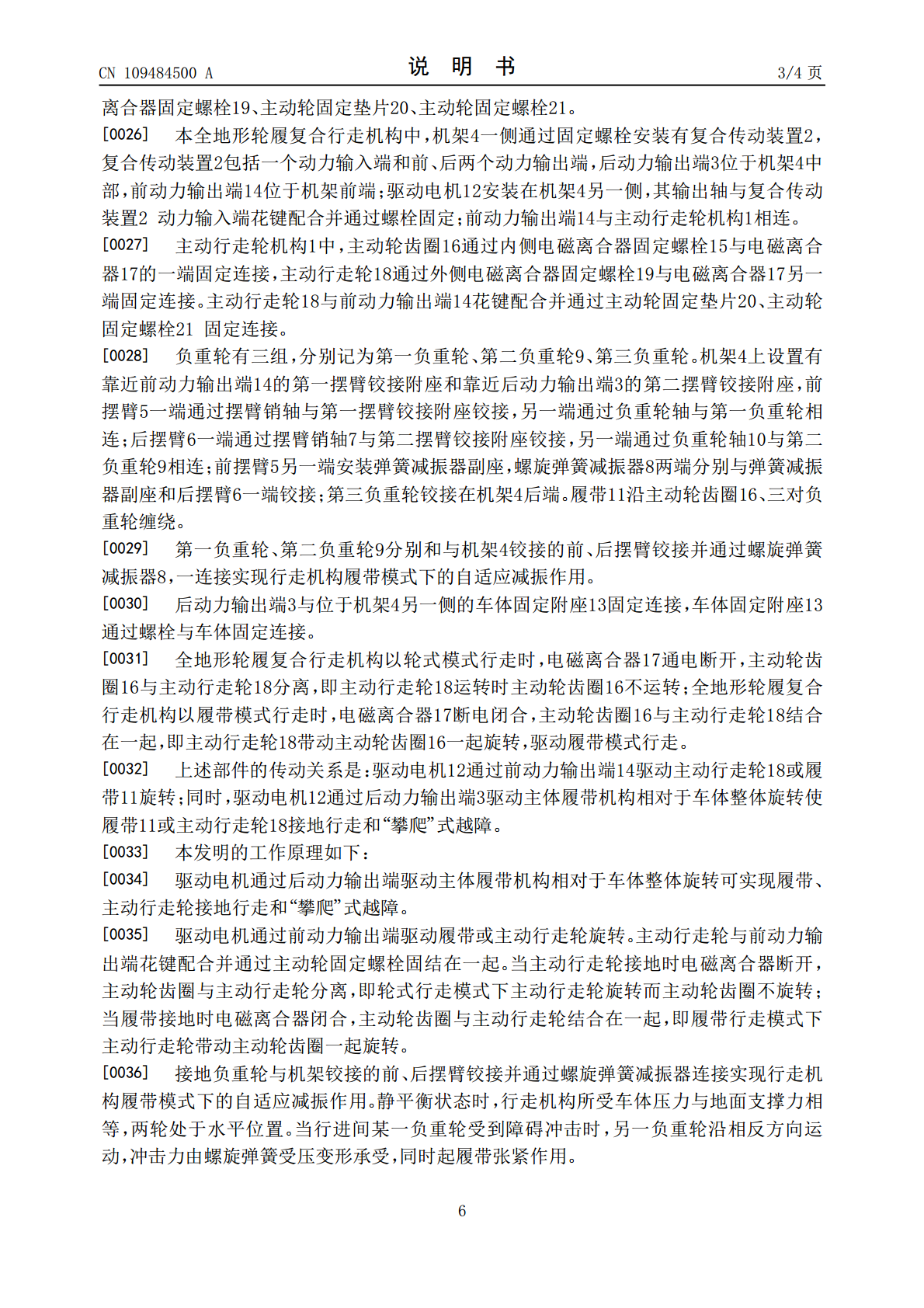
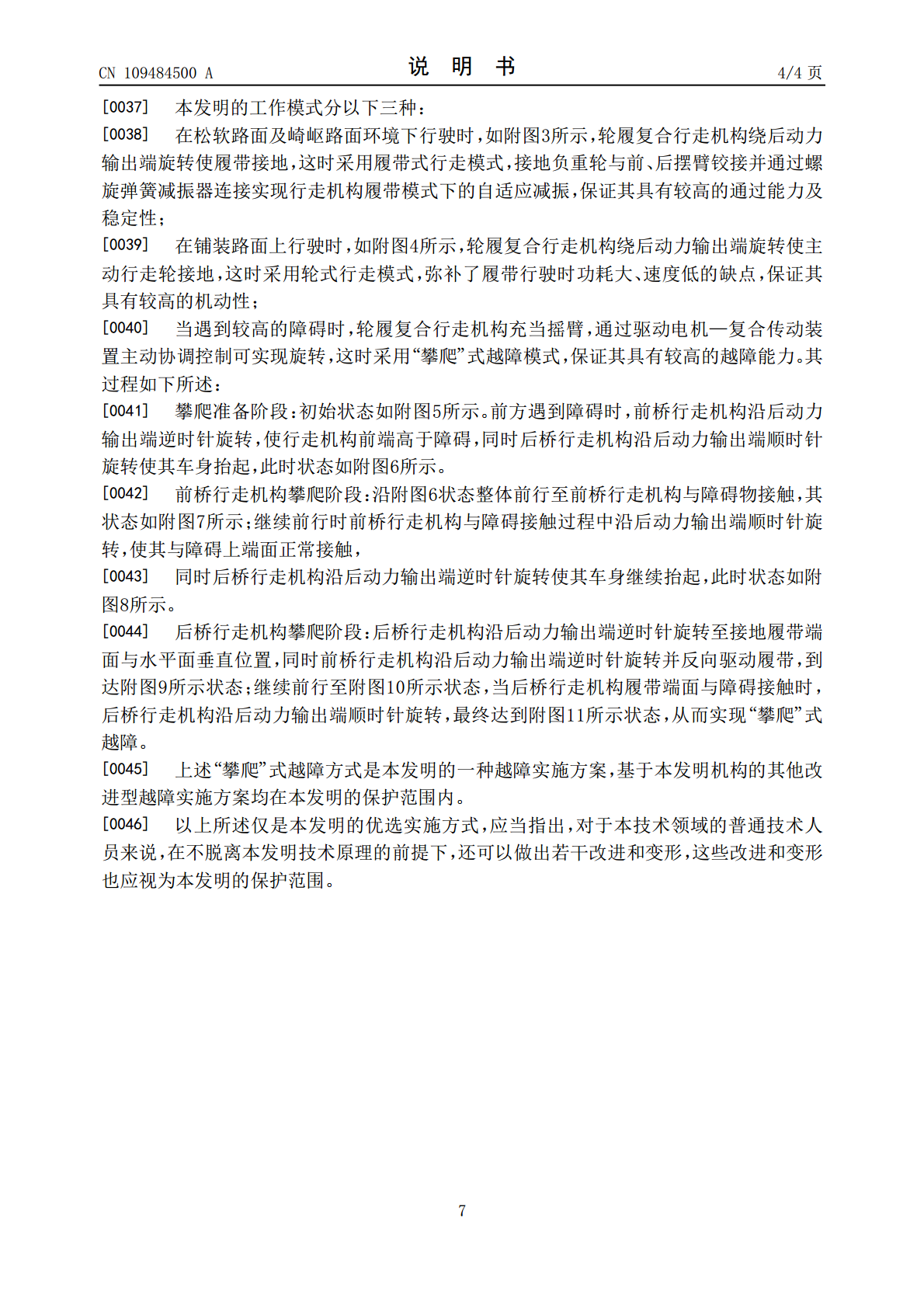
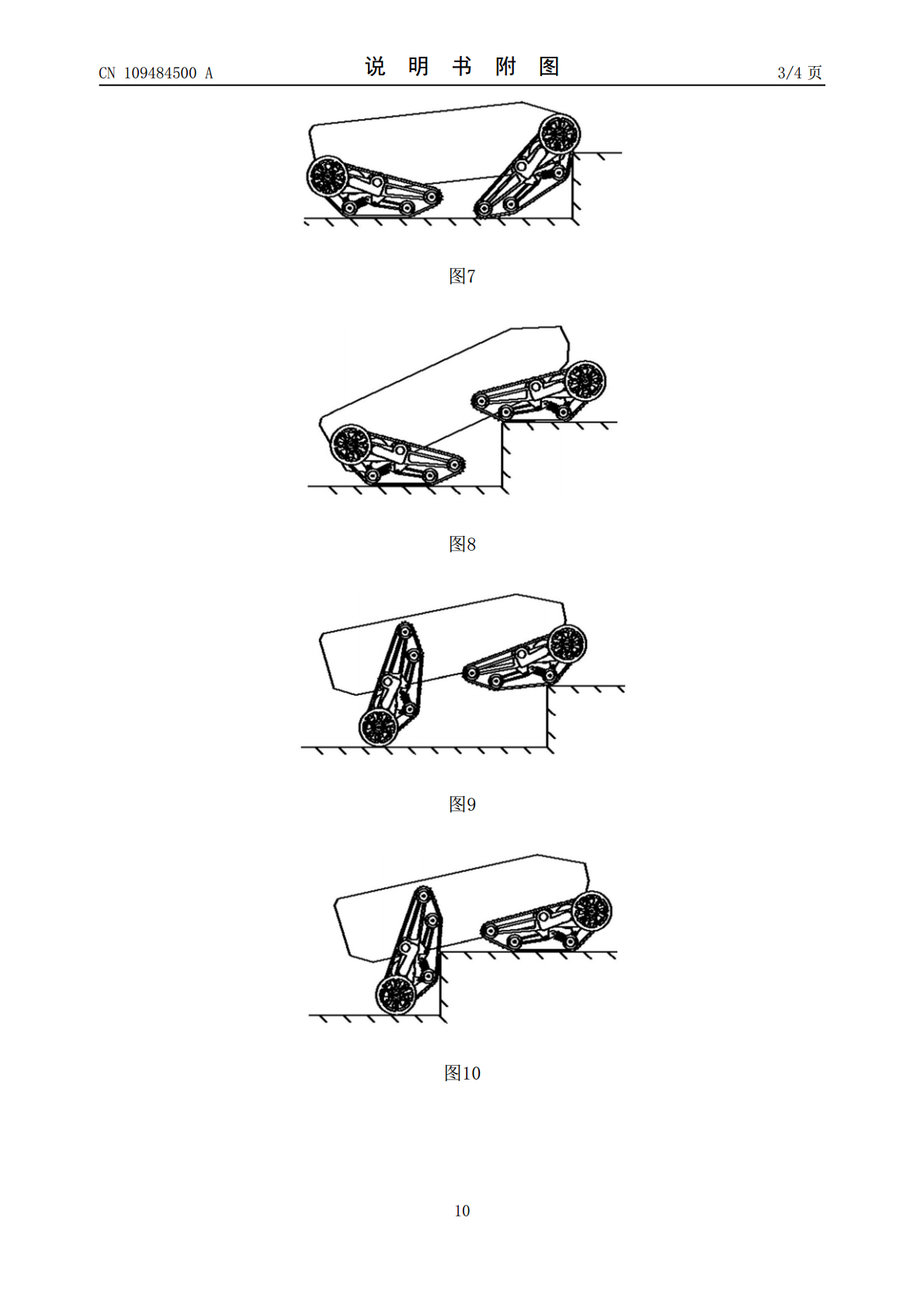
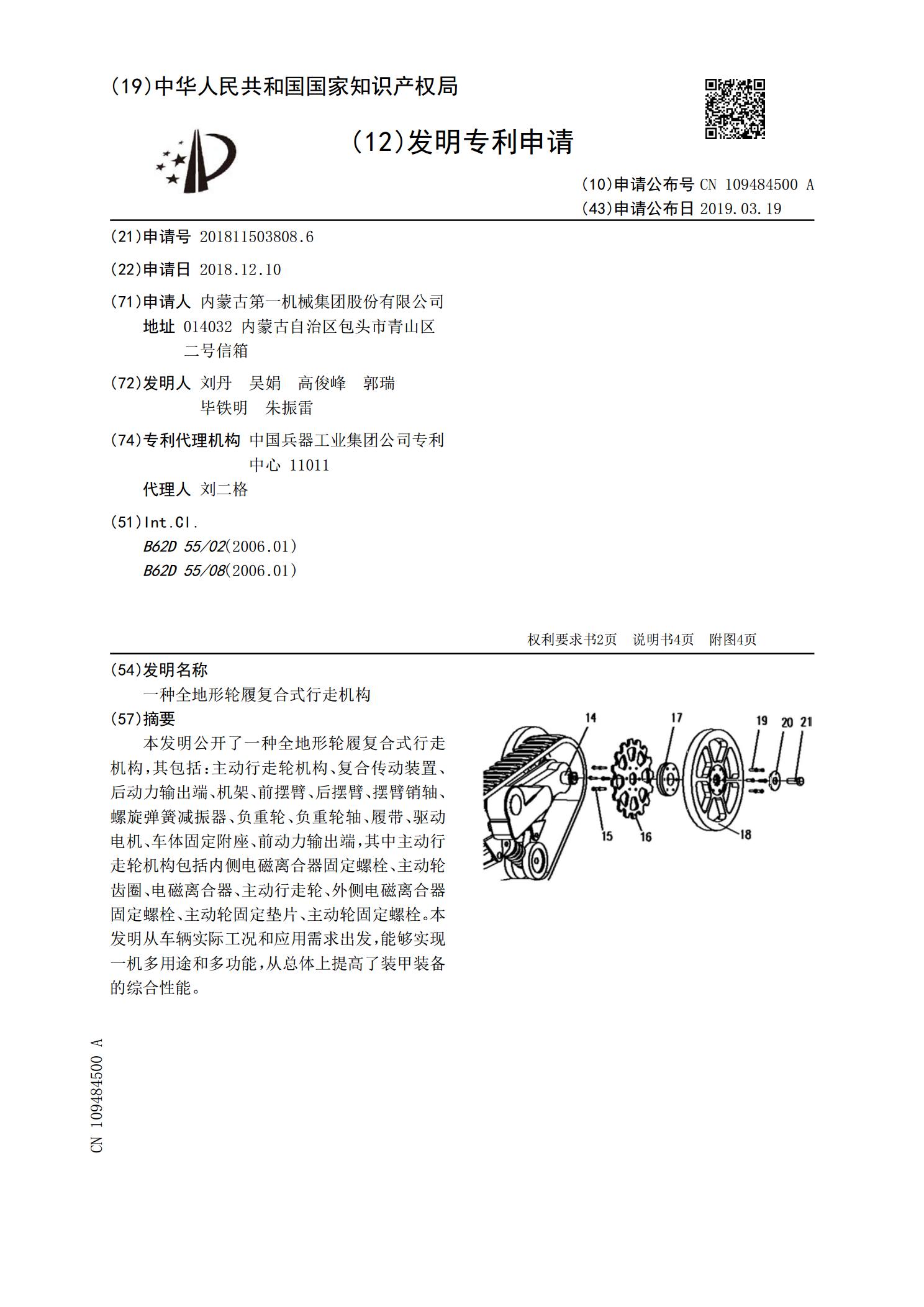
本发明公开了一种全地形轮履复合式行走机构,其包括:主动行走轮机构、复合传动装置、后动力输出端、机架、前摆臂、后摆臂、摆臂销轴、螺旋弹簧减振器、负重轮、负重轮轴、履带、驱动电机、车体固定附座、前动力输出端,其中主动行走轮机构包括内侧电磁离合器固定螺栓、主动轮齿圈、电磁离合器、主动行走轮、外侧电磁离合器固定螺栓、主动轮固定垫片、主动轮固定螺栓。本发明从车辆实际工况和应用需求出发,能够实现一机多用途和多功能,从总体上提高了装甲装备的综合性能。
一种全地形自适应轮履及其应用.pdf
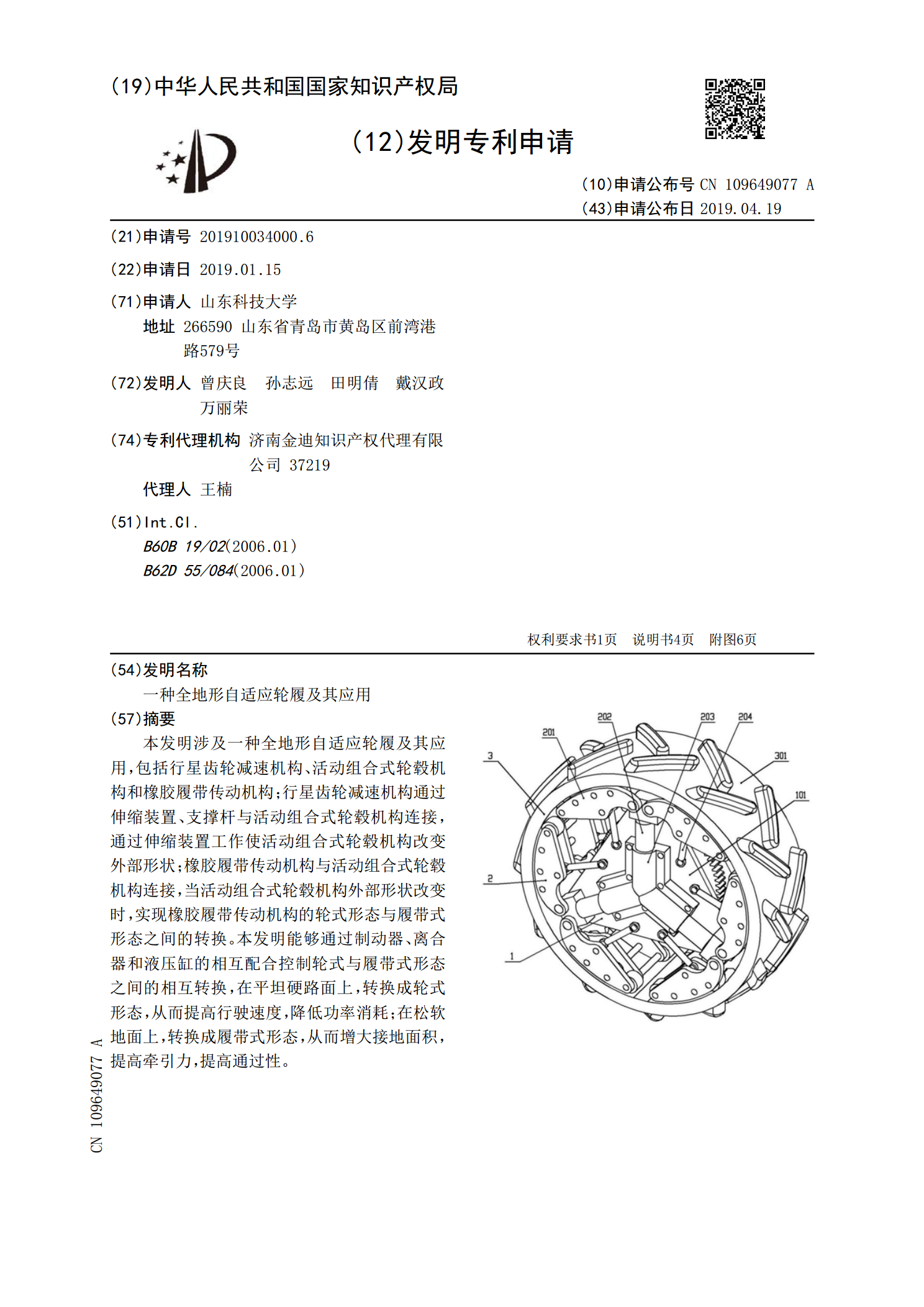
本发明涉及一种全地形自适应轮履及其应用,包括行星齿轮减速机构、活动组合式轮毂机构和橡胶履带传动机构;行星齿轮减速机构通过伸缩装置、支撑杆与活动组合式轮毂机构连接,通过伸缩装置工作使活动组合式轮毂机构改变外部形状;橡胶履带传动机构与活动组合式轮毂机构连接,当活动组合式轮毂机构外部形状改变时,实现橡胶履带传动机构的轮式形态与履带式形态之间的转换。本发明能够通过制动器、离合器和液压缸的相互配合控制轮式与履带式形态之间的相互转换,在平坦硬路面上,转换成轮式形态,从而提高行驶速度,降低功率消耗;在松软地面上,转换成
一种可升降轮履结合全地形底盘.pdf
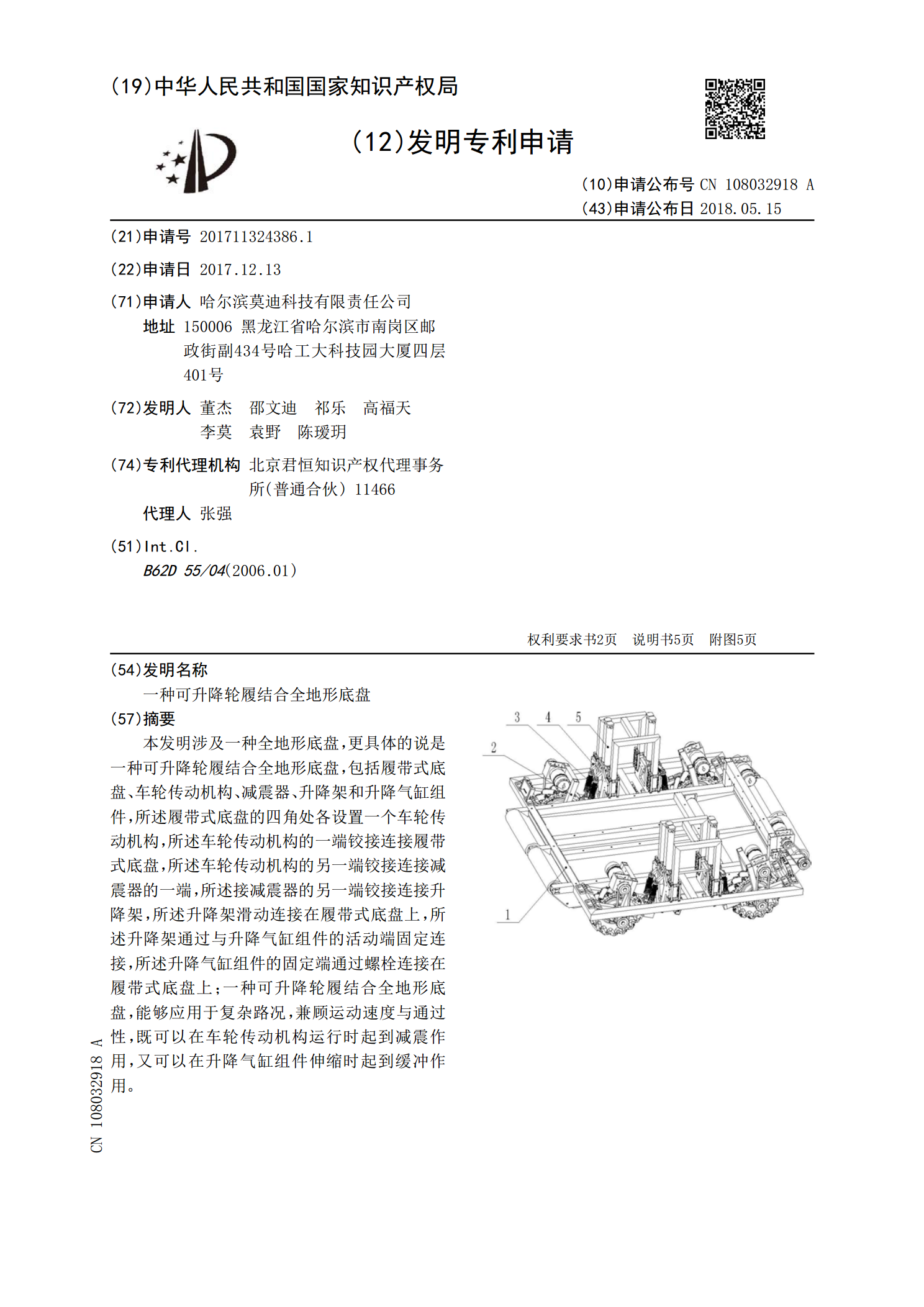
本发明涉及一种全地形底盘,更具体的说是一种可升降轮履结合全地形底盘,包括履带式底盘、车轮传动机构、减震器、升降架和升降气缸组件,所述履带式底盘的四角处各设置一个车轮传动机构,所述车轮传动机构的一端铰接连接履带式底盘,所述车轮传动机构的另一端铰接连接减震器的一端,所述接减震器的另一端铰接连接升降架,所述升降架滑动连接在履带式底盘上,所述升降架通过与升降气缸组件的活动端固定连接,所述升降气缸组件的固定端通过螺栓连接在履带式底盘上;一种可升降轮履结合全地形底盘,能够应用于复杂路况,兼顾运动速度与通过性,既可以在
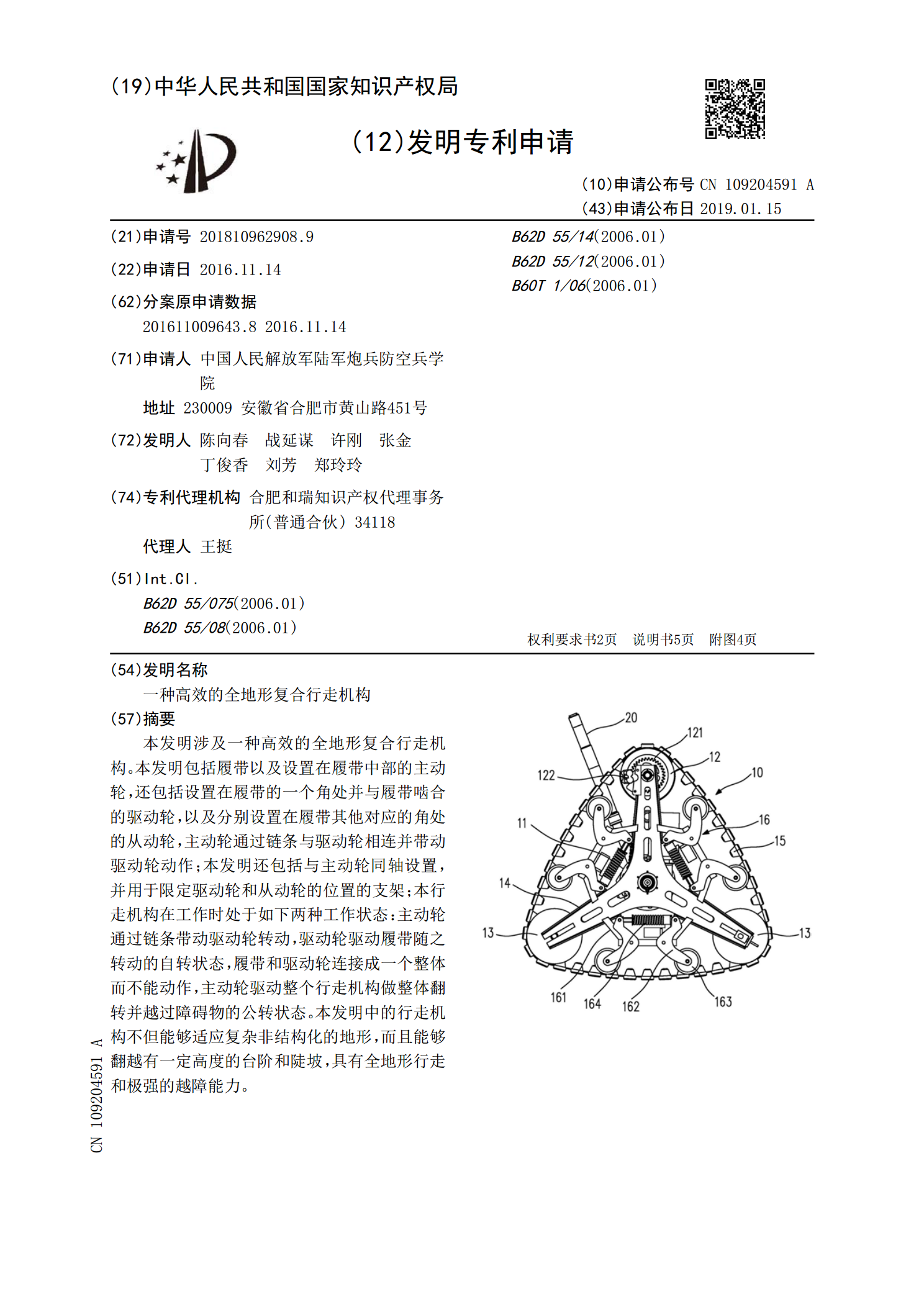
一种高效的全地形复合行走机构.pdf
本发明涉及一种高效的全地形复合行走机构。本发明包括履带以及设置在履带中部的主动轮,还包括设置在履带的一个角处并与履带啮合的驱动轮,以及分别设置在履带其他对应的角处的从动轮,主动轮通过链条与驱动轮相连并带动驱动轮动作;本发明还包括与主动轮同轴设置,并用于限定驱动轮和从动轮的位置的支架;本行走机构在工作时处于如下两种工作状态:主动轮通过链条带动驱动轮转动,驱动轮驱动履带随之转动的自转状态,履带和驱动轮连接成一个整体而不能动作,主动轮驱动整个行走机构做整体翻转并越过障碍物的公转状态。本发明中的行走机构不但能够适
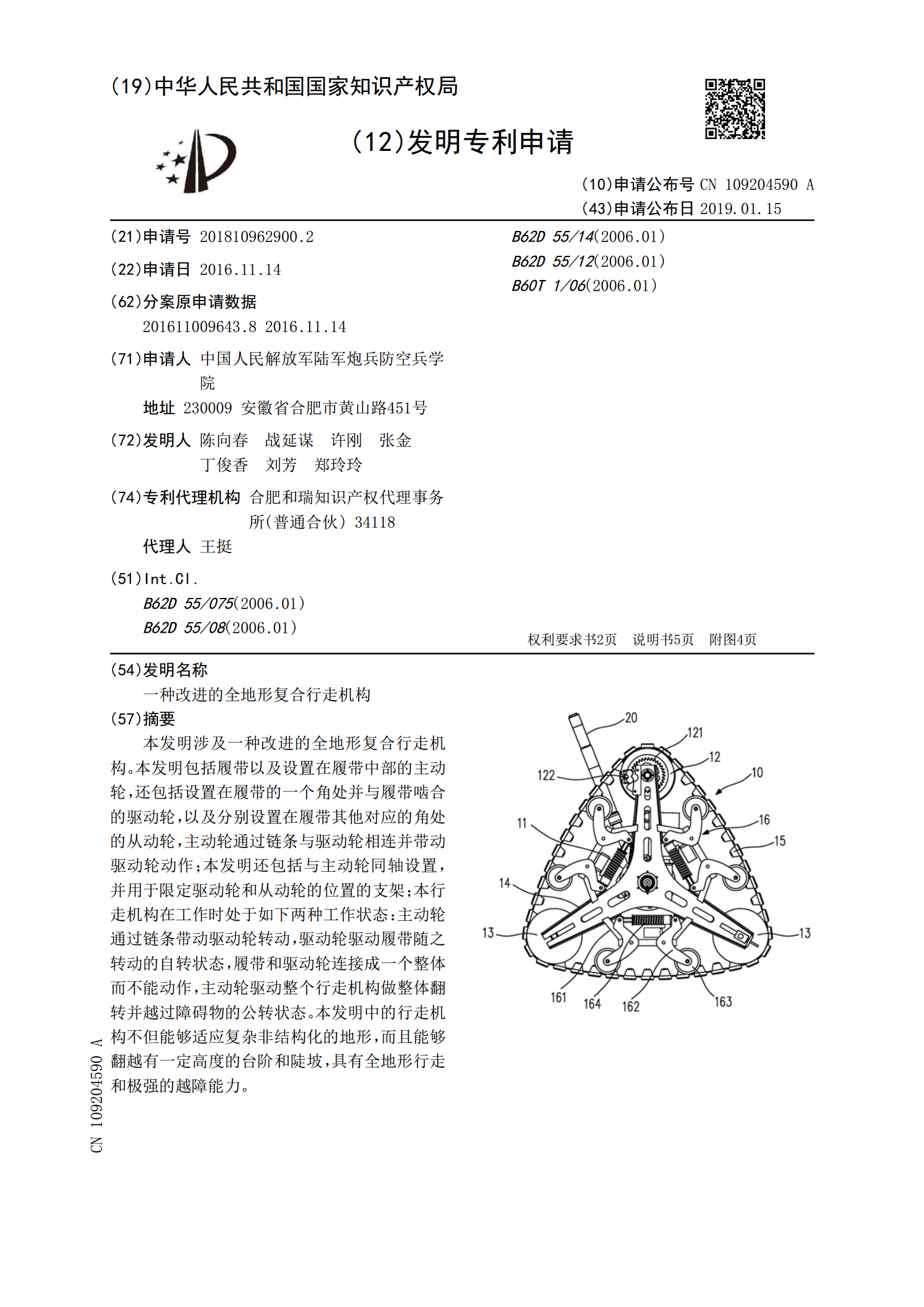
一种改进的全地形复合行走机构.pdf
本发明涉及一种改进的全地形复合行走机构。本发明包括履带以及设置在履带中部的主动轮,还包括设置在履带的一个角处并与履带啮合的驱动轮,以及分别设置在履带其他对应的角处的从动轮,主动轮通过链条与驱动轮相连并带动驱动轮动作;本发明还包括与主动轮同轴设置,并用于限定驱动轮和从动轮的位置的支架;本行走机构在工作时处于如下两种工作状态:主动轮通过链条带动驱动轮转动,驱动轮驱动履带随之转动的自转状态,履带和驱动轮连接成一个整体而不能动作,主动轮驱动整个行走机构做整体翻转并越过障碍物的公转状态。本发明中的行走机构不但能够适