
一种智能救援机器人及其控制方法.pdf

一条****88


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能救援机器人及其控制方法.pdf
本发明公开了一种智能救援机器人,包括第一探测器、第二探测器、第三探测器和清理机构,所述第一探测器前侧固定连接清理机构,且所述第一探测器后侧固定连接第二探测器,所述第二探测器后侧固定连接第三探测器,所述第一探测器、第二探测器和第三探测器可根据需求组合分离,同时每个探测器的前后机身通过万向接头连接,车轮根据不同环境进行适当调整;探测器组合方式多样,能偶适应各种环境的救援工作,大大提高了救援的效率,为救援工作节省宝贵的救援时间。

一种智能停车机器人及其控制方法.pdf
本发明公开了一种智能停车机器人及其控制方法,该停车机器人包括主机架,主机架的两侧对称布置夹取单元,每个夹取单元包括前夹取臂和后夹取臂;前夹取臂包括第一驱动电机、蜗轮蜗杆减速器、第一承载臂和开关传感器;后夹取臂包含第二驱动电机、行星减速机、丝杠、导轨、滑块、第二承载臂、旋转连接板和第三驱动电机;主机架上设置驱动系统。本发明机器人在交接区和停车区均无需建造特殊平台结构,便可完成车辆的托举和移动,从而达到最高的空间利用率;在两个机器人协同工作夹取车辆时,可采用不同的夹取方式,可以适应不同的场合。

一种智能采血机器人及其控制方法.pdf
本发明提供了一种智能采血机器人及其控制方法,包括打印贴标模块,空间机械手组件,采血管摇匀组件,智能采血称和低温冷藏组件。本发明的智能采血机器人能够进行采血袋的精准称重摇匀、真空采血试管贴标签,并可以对采样后的真空采血管进行摇晃防凝血、条码核对,以及留取血液标本量复核、冷藏存储和方便采血完成的输血管热合等工作,实现完整的采血过程。通过其自动化结构及智能化控制,确保了整个采血流程符合采血规程要求,且整个采血工作过程中关键点信息均有进行采集保存确保采血信息可溯源性,同时极大的解放了人力,避免医护人员连续采血导致

一种壁面检测救援机器人及其控制方法.pdf
本发明公开了一种壁面检测救援机器人及其控制方法,总体结构包括机器人本体、控制系统、楼顶安全保护系统。机器人本体包括旋转台、驱动轮、驱动电机、吸盘、机械臂、摄像头、喷涂装置等;楼顶安全保护装置包括随动小车、卷扬机构和钢丝绳等,承受系统的一部分自重,并随机器人一起运动。本发明能够实现机器人在高层建筑物表面实时检测瓷砖和玻璃等的贴合情况以及裂缝状况,并且当瓷砖或玻璃松动时可以利用自身携带的喷涂装置自动将松动处涂上颜料标记出来,方便维修人员更换,此外,当紧急状况发生时,可以破窗进入室内,展开救援。
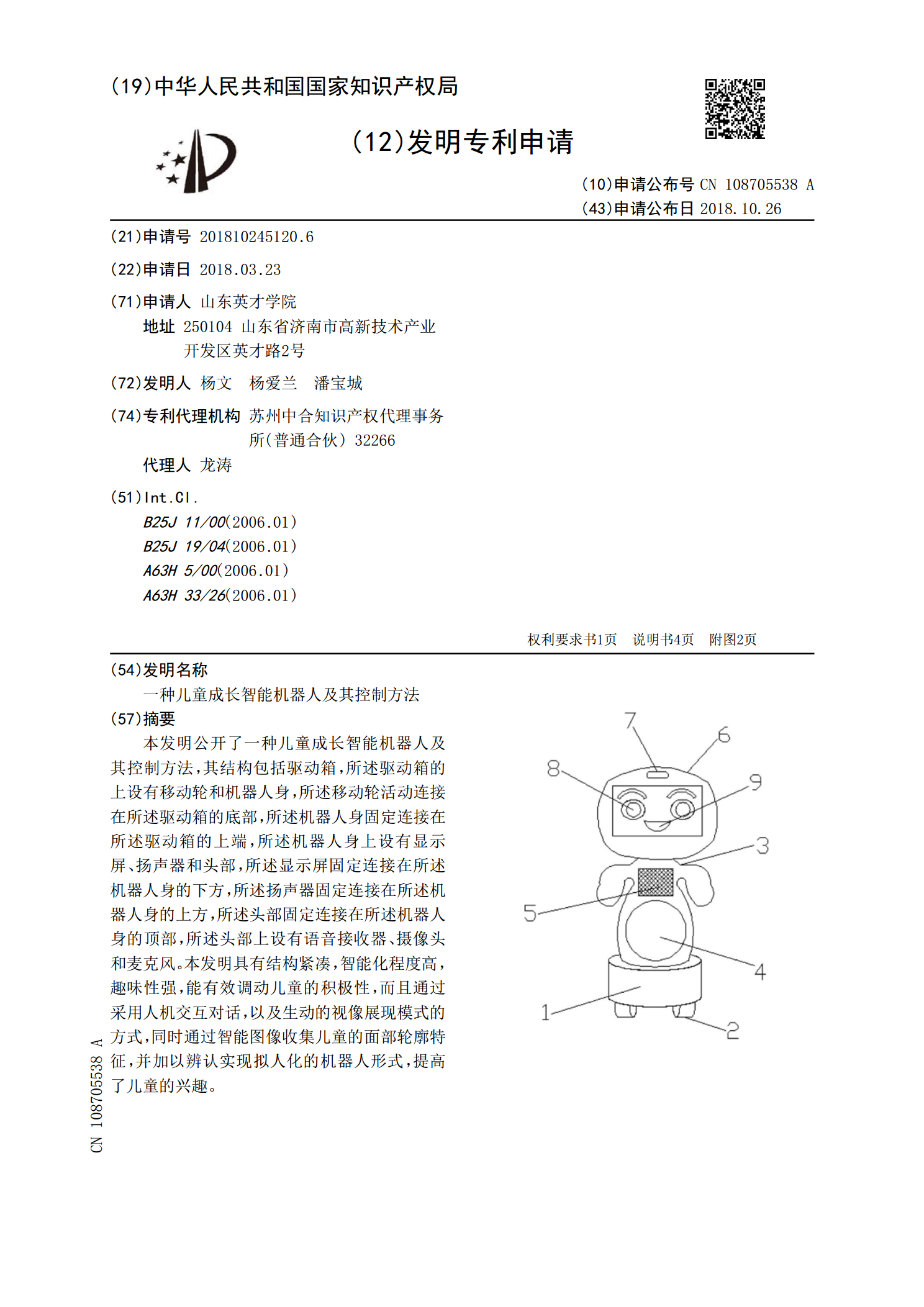
一种儿童成长智能机器人及其控制方法.pdf
本发明公开了一种儿童成长智能机器人及其控制方法,其结构包括驱动箱,所述驱动箱的上设有移动轮和机器人身,所述移动轮活动连接在所述驱动箱的底部,所述机器人身固定连接在所述驱动箱的上端,所述机器人身上设有显示屏、扬声器和头部,所述显示屏固定连接在所述机器人身的下方,所述扬声器固定连接在所述机器人身的上方,所述头部固定连接在所述机器人身的顶部,所述头部上设有语音接收器、摄像头和麦克风。本发明具有结构紧凑,智能化程度高,趣味性强,能有效调动儿童的积极性,而且通过采用人机交互对话,以及生动的视像展现模式的方式,同时通