
一种智能停车机器人及其控制方法.pdf

阳炎****找我


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能停车机器人及其控制方法.pdf
本发明公开了一种智能停车机器人及其控制方法,该停车机器人包括主机架,主机架的两侧对称布置夹取单元,每个夹取单元包括前夹取臂和后夹取臂;前夹取臂包括第一驱动电机、蜗轮蜗杆减速器、第一承载臂和开关传感器;后夹取臂包含第二驱动电机、行星减速机、丝杠、导轨、滑块、第二承载臂、旋转连接板和第三驱动电机;主机架上设置驱动系统。本发明机器人在交接区和停车区均无需建造特殊平台结构,便可完成车辆的托举和移动,从而达到最高的空间利用率;在两个机器人协同工作夹取车辆时,可采用不同的夹取方式,可以适应不同的场合。

一种停车辅助机器人及其控制方法.pdf
本发明公开了一种停车辅助机器人及其控制方法,属于AGV定位技术领域,包括四个移动车,所述移动车包括全向轮底盘、设置在全向轮底盘上侧的电动千斤顶和由电动千斤顶带动升降的车轮架所述车轮架设有平行间隔的两伸出臂,伸出臂横向设置,两伸出臂之间的间距小于汽车车轮的外径,两伸出臂用于向上抬起汽车车轮;全向轮底盘上还设有控制盒,控制盒内设有主控板;全向轮底盘上还设有多个全向轮和分别带动多个全向轮的步进电机,解决了采用AGV移动车帮助司机停车的技术问题,本发明采用手机控制4辆AGV移动车,拖动汽车到达停车位,精度以厘米为
智能停车收费系统及其控制方法.pdf
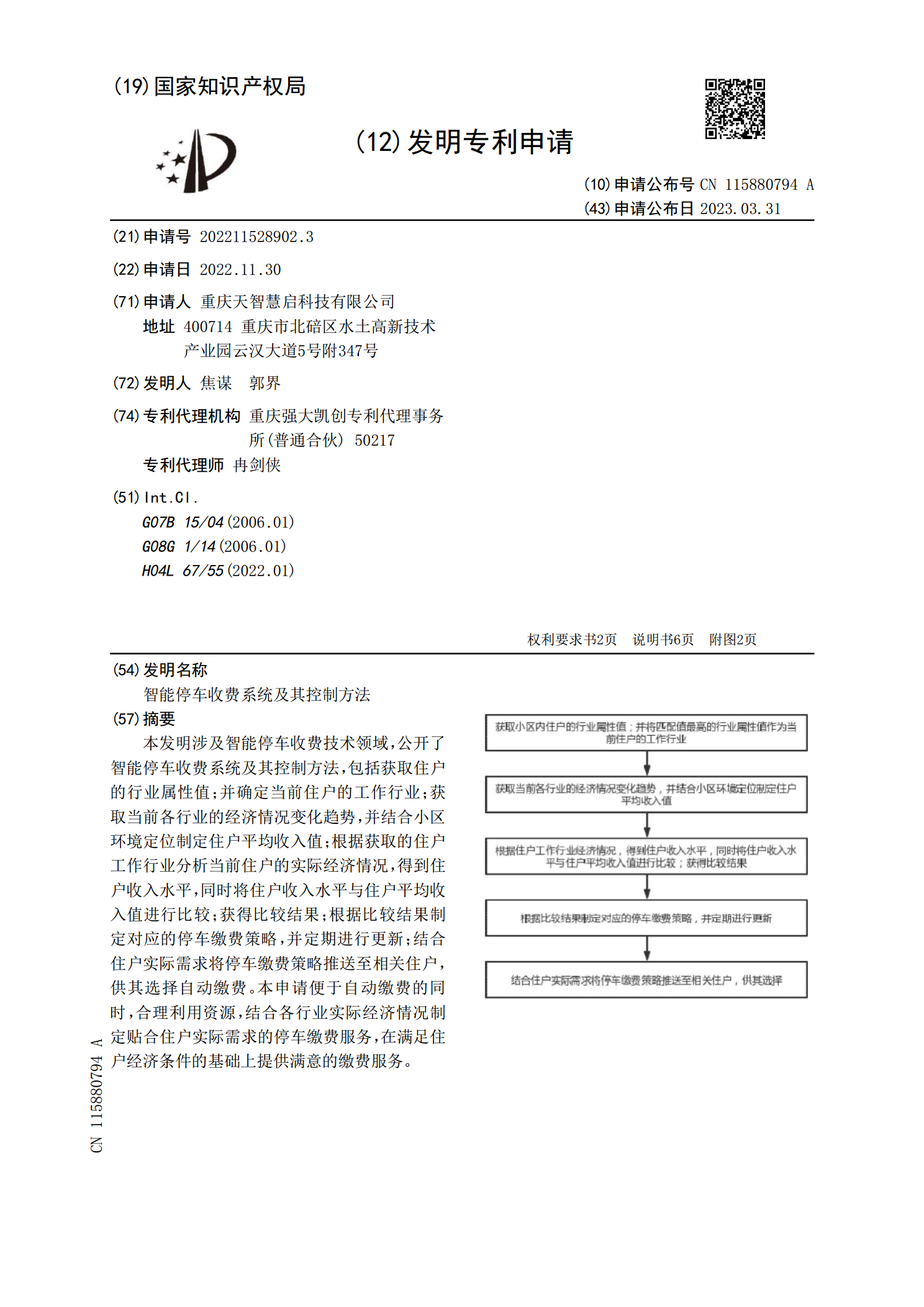
本发明涉及智能停车收费技术领域,公开了智能停车收费系统及其控制方法,包括获取住户的行业属性值;并确定当前住户的工作行业;获取当前各行业的经济情况变化趋势,并结合小区环境定位制定住户平均收入值;根据获取的住户工作行业分析当前住户的实际经济情况,得到住户收入水平,同时将住户收入水平与住户平均收入值进行比较;获得比较结果;根据比较结果制定对应的停车缴费策略,并定期进行更新;结合住户实际需求将停车缴费策略推送至相关住户,供其选择自动缴费。本申请便于自动缴费的同时,合理利用资源,结合各行业实际经济情况制定贴合住户实

一种智能采血机器人及其控制方法.pdf
本发明提供了一种智能采血机器人及其控制方法,包括打印贴标模块,空间机械手组件,采血管摇匀组件,智能采血称和低温冷藏组件。本发明的智能采血机器人能够进行采血袋的精准称重摇匀、真空采血试管贴标签,并可以对采样后的真空采血管进行摇晃防凝血、条码核对,以及留取血液标本量复核、冷藏存储和方便采血完成的输血管热合等工作,实现完整的采血过程。通过其自动化结构及智能化控制,确保了整个采血流程符合采血规程要求,且整个采血工作过程中关键点信息均有进行采集保存确保采血信息可溯源性,同时极大的解放了人力,避免医护人员连续采血导致

一种智能救援机器人及其控制方法.pdf
本发明公开了一种智能救援机器人,包括第一探测器、第二探测器、第三探测器和清理机构,所述第一探测器前侧固定连接清理机构,且所述第一探测器后侧固定连接第二探测器,所述第二探测器后侧固定连接第三探测器,所述第一探测器、第二探测器和第三探测器可根据需求组合分离,同时每个探测器的前后机身通过万向接头连接,车轮根据不同环境进行适当调整;探测器组合方式多样,能偶适应各种环境的救援工作,大大提高了救援的效率,为救援工作节省宝贵的救援时间。