
一种双轮差动式机器人运动控制方法.pdf

努力****承悦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双轮差动式机器人运动控制方法.pdf
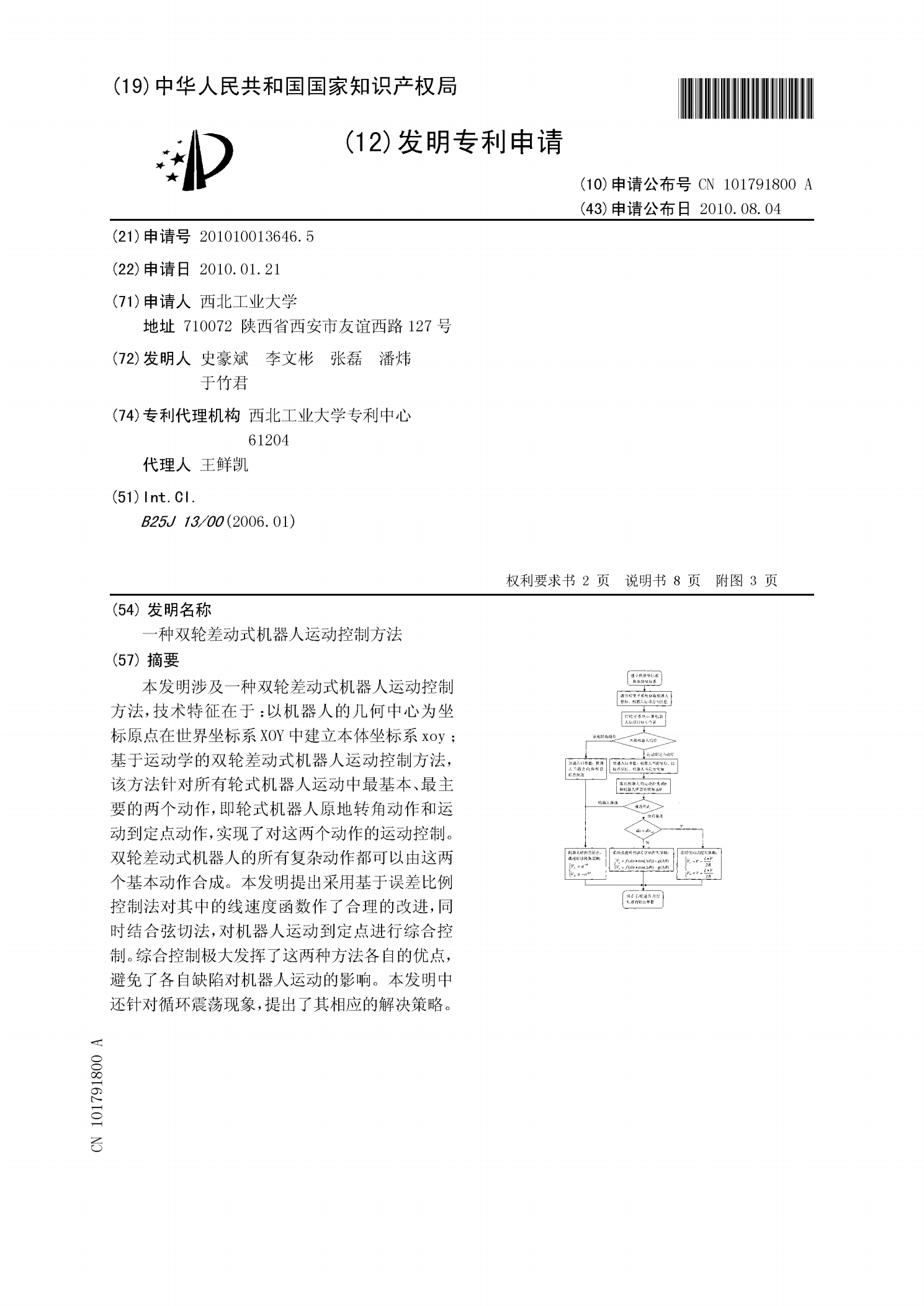
本发明涉及一种双轮差动式机器人运动控制方法,技术特征在于:以机器人的几何中心为坐标原点在世界坐标系XOY中建立本体坐标系xoy;基于运动学的双轮差动式机器人运动控制方法,该方法针对所有轮式机器人运动中最基本、最主要的两个动作,即轮式机器人原地转角动作和运动到定点动作,实现了对这两个动作的运动控制。双轮差动式机器人的所有复杂动作都可以由这两个基本动作合成。本发明提出采用基于误差比例控制法对其中的线速度函数作了合理的改进,同时结合弦切法,对机器人运动到定点进行综合控制。综合控制极大发挥了这两种方法各自的优点,

一种机器人双轮差动越障底盘运动轨迹获取方法.pdf
本发明公开了一种机器人双轮差动越障底盘运动轨迹获取方法,包括以下步骤:1)取得各个转动轮的转动状态;2)建立越障底盘运动学模型,确定小车整体质心O点在两轮轴中心距离D(t)上的位置p
一种双轮差动小车定位控制方法.pdf
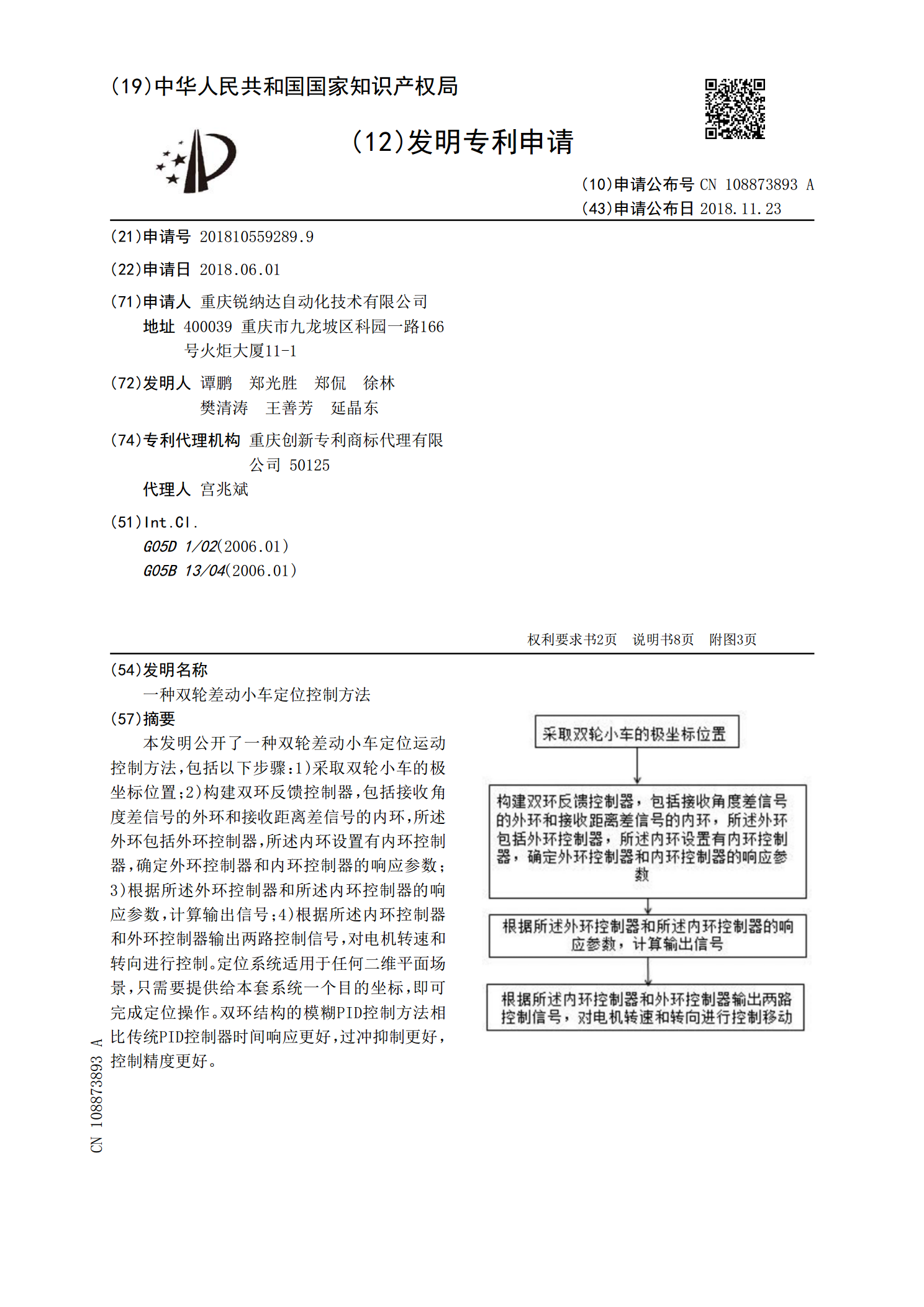
本发明公开了一种双轮差动小车定位运动控制方法,包括以下步骤:1)采取双轮小车的极坐标位置;2)构建双环反馈控制器,包括接收角度差信号的外环和接收距离差信号的内环,所述外环包括外环控制器,所述内环设置有内环控制器,确定外环控制器和内环控制器的响应参数;3)根据所述外环控制器和所述内环控制器的响应参数,计算输出信号;4)根据所述内环控制器和外环控制器输出两路控制信号,对电机转速和转向进行控制。定位系统适用于任何二维平面场景,只需要提供给本套系统一个目的坐标,即可完成定位操作。双环结构的模糊PID控制方法相比传

一种双轮机器人的直接控制方法.pdf
本发明公开了一种双轮机器人的直接控制方法,包括以下步骤:S1:构建机器人跟踪目标的运动轨迹;S2:通过分析机器人的运动过程构建机器人运动方程;S3:利用步骤S1所述跟踪目标运动轨迹与步骤S2所述运动方程构建误差函数,结合零化动力学方法与梯度动力学方法计算得到控制量;S4:将所述控制量传递给机器人的控制器用于直接控制机器人。本发明设计方法简单直接,通过零化动力学方法与梯度动力学方法的引入确保了误差函数的收敛,提高了控制精度;本发明中设计的参数少,易于选择,克服了传统方法中参数较多难以选择的问题,便于直接计算

一种双轮足机器人单边越障控制方法.pdf
本发明提供一种双轮足机器人单边越障控制方法,用于解决由于复杂建模方式所导致的双轮足机器人单边越障控制方式复杂的问题。首先,建立含有机器人虚拟腿姿态角度、虚拟腿姿态角速度、机体偏航姿态角度、机体偏航姿态角速度、机体前向位移,以及机体前向线速度六个状态量的双轮足简化动力学模型,并进行线性化、离散化处理;其次针对离散的虚拟腿长度进行状态反馈矩阵元素的多项式插值,采用卡尔曼滤波器实现各状态观测,利用线性二次型调节器进行全状态反馈,实现状态反馈平衡控制,最后,对支撑腿进行侧倾角姿态补偿,通过支撑腿运动学逆解产生髋部