
一种线控转向和制动系统及其控制方法.pdf

Ch****75

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线控转向和制动系统及其控制方法.pdf
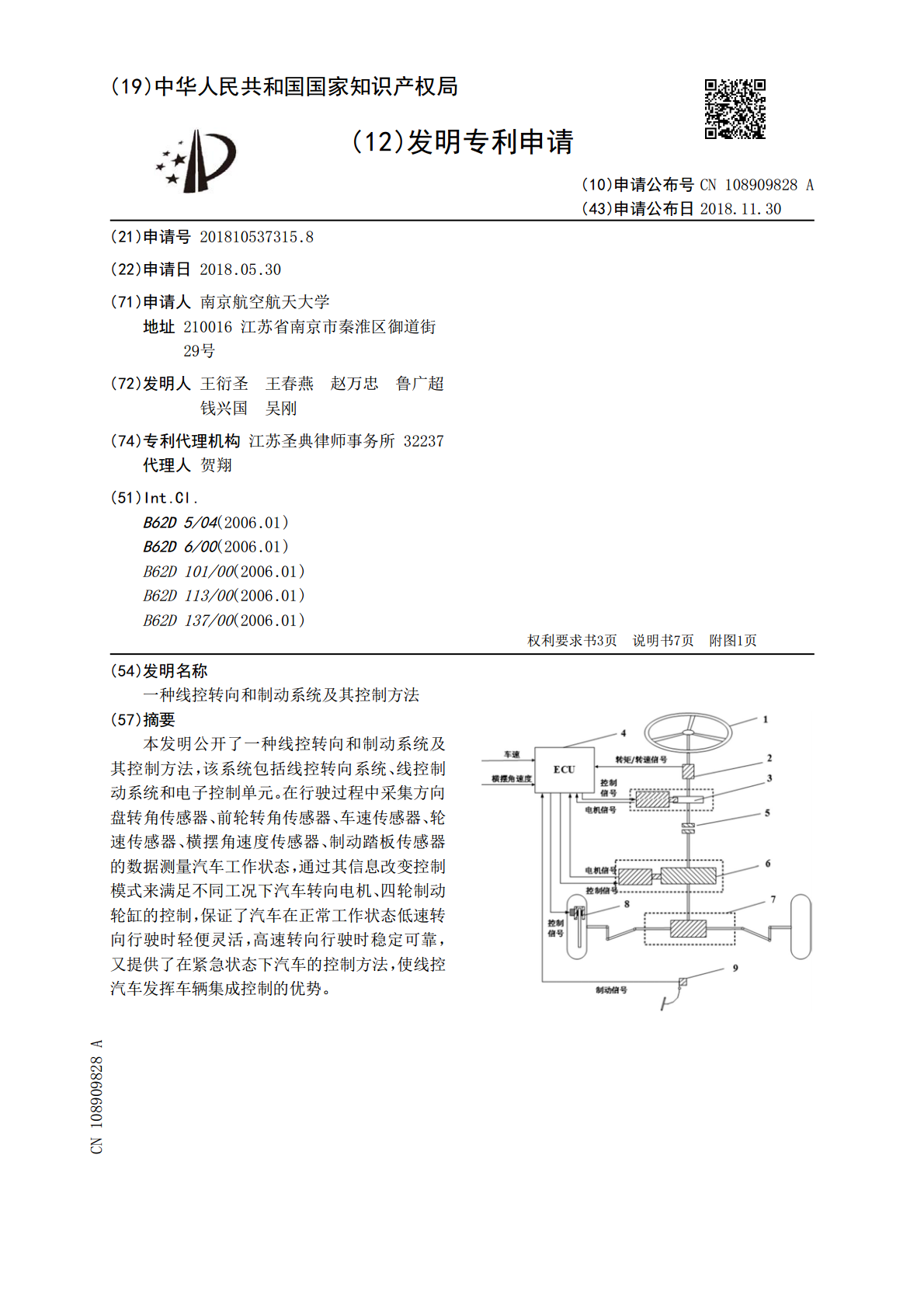
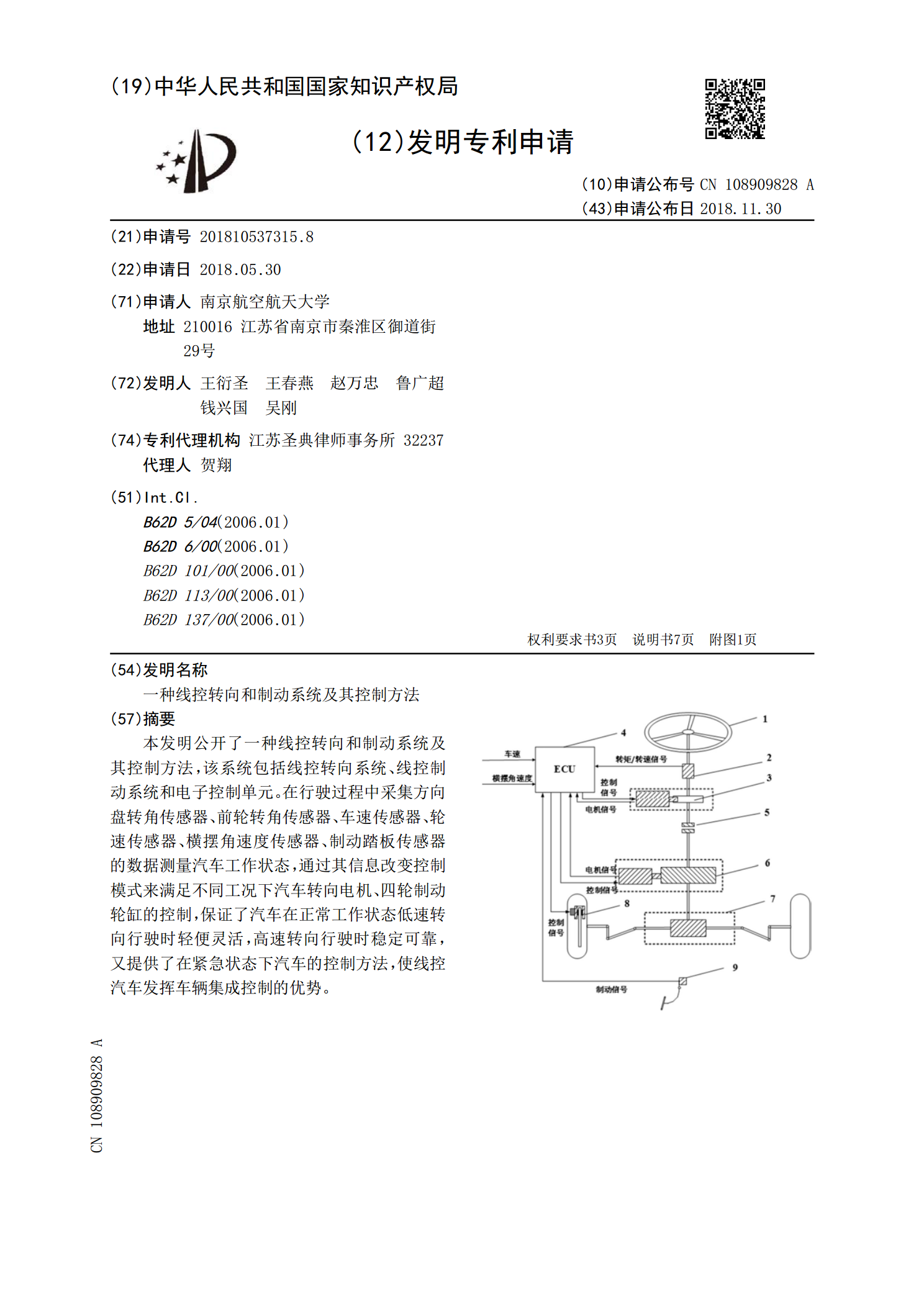
本发明公开了一种线控转向和制动系统及其控制方法,该系统包括线控转向系统、线控制动系统和电子控制单元。在行驶过程中采集方向盘转角传感器、前轮转角传感器、车速传感器、轮速传感器、横摆角速度传感器、制动踏板传感器的数据测量汽车工作状态,通过其信息改变控制模式来满足不同工况下汽车转向电机、四轮制动轮缸的控制,保证了汽车在正常工作状态低速转向行驶时轻便灵活,高速转向行驶时稳定可靠,又提供了在紧急状态下汽车的控制方法,使线控汽车发挥车辆集成控制的优势。
线控转向系统和线控转向系统的控制方法.pdf
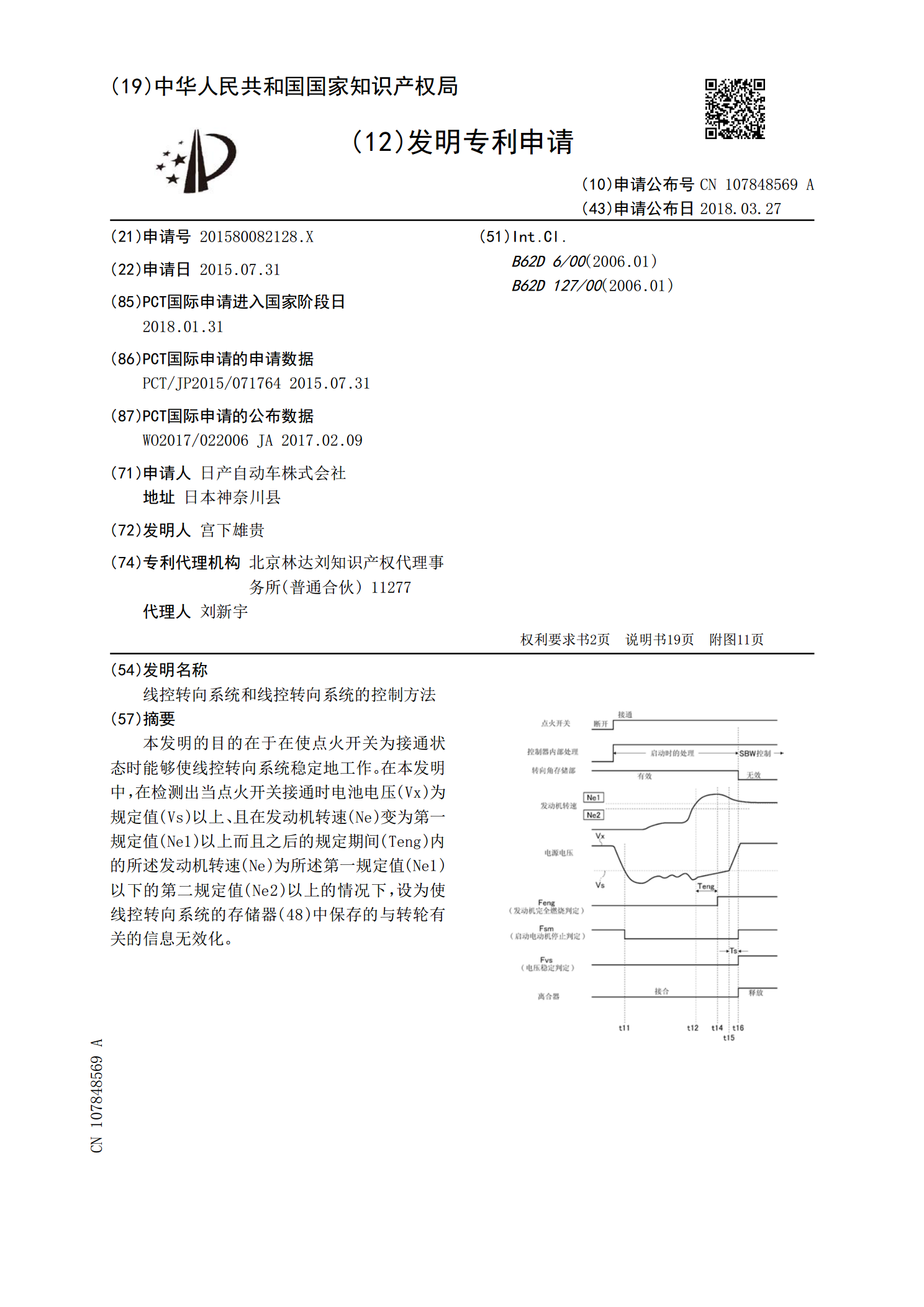
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。
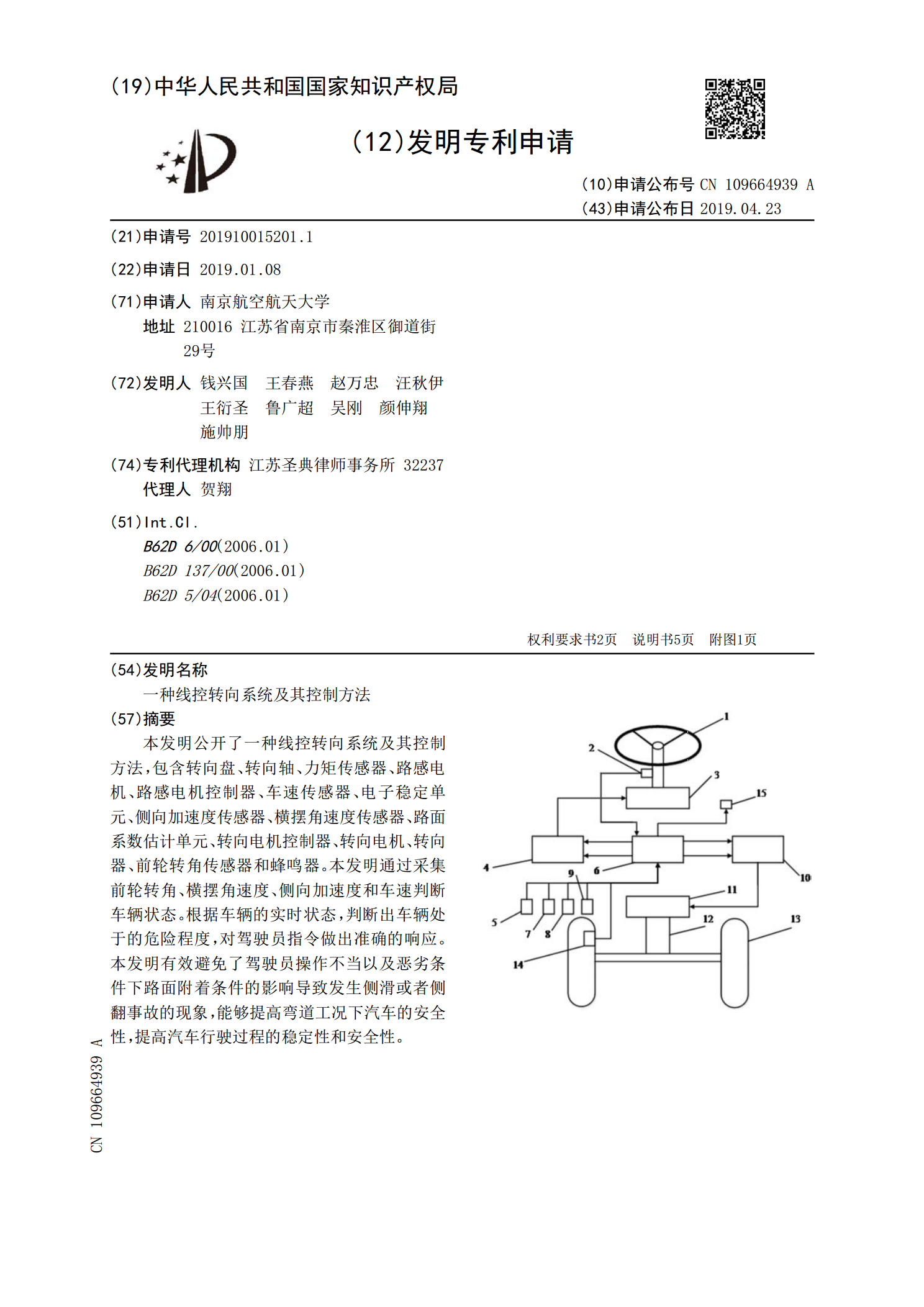
一种线控转向系统及其控制方法.pdf
本发明公开了一种线控转向系统及其控制方法,包含转向盘、转向轴、力矩传感器、路感电机、路感电机控制器、车速传感器、电子稳定单元、侧向加速度传感器、横摆角速度传感器、路面系数估计单元、转向电机控制器、转向电机、转向器、前轮转角传感器和蜂鸣器。本发明通过采集前轮转角、横摆角速度、侧向加速度和车速判断车辆状态。根据车辆的实时状态,判断出车辆处于的危险程度,对驾驶员指令做出准确的响应。本发明有效避免了驾驶员操作不当以及恶劣条件下路面附着条件的影响导致发生侧滑或者侧翻事故的现象,能够提高弯道工况下汽车的安全性,提高汽
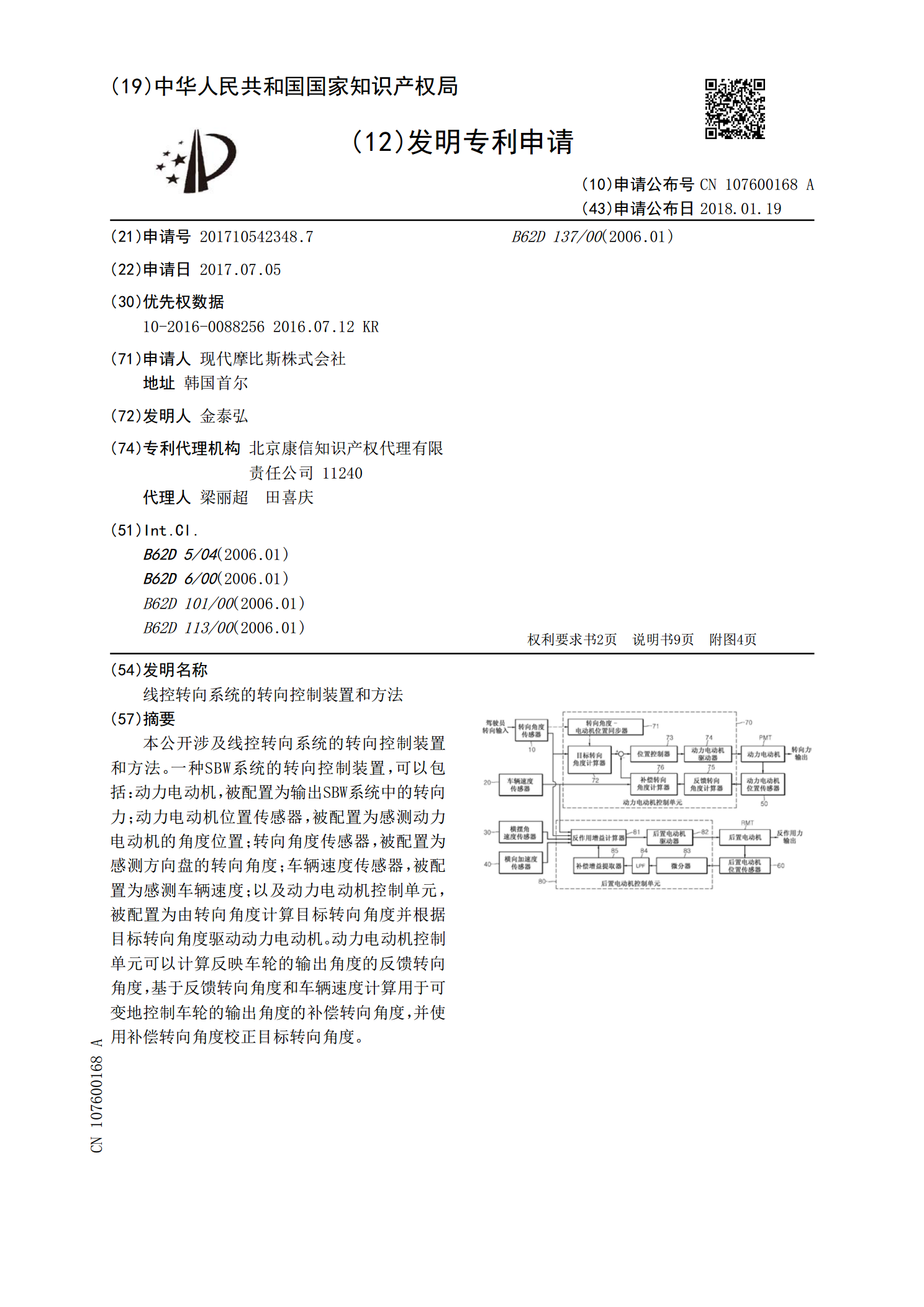
线控转向系统的转向控制装置和方法.pdf
本公开涉及线控转向系统的转向控制装置和方法。一种SBW系统的转向控制装置,可以包括:动力电动机,被配置为输出SBW系统中的转向力;动力电动机位置传感器,被配置为感测动力电动机的角度位置;转向角度传感器,被配置为感测方向盘的转向角度;车辆速度传感器,被配置为感测车辆速度;以及动力电动机控制单元,被配置为由转向角度计算目标转向角度并根据目标转向角度驱动动力电动机。动力电动机控制单元可以计算反映车轮的输出角度的反馈转向角度,基于反馈转向角度和车辆速度计算用于可变地控制车轮的输出角度的补偿转向角度,并使用补偿转向
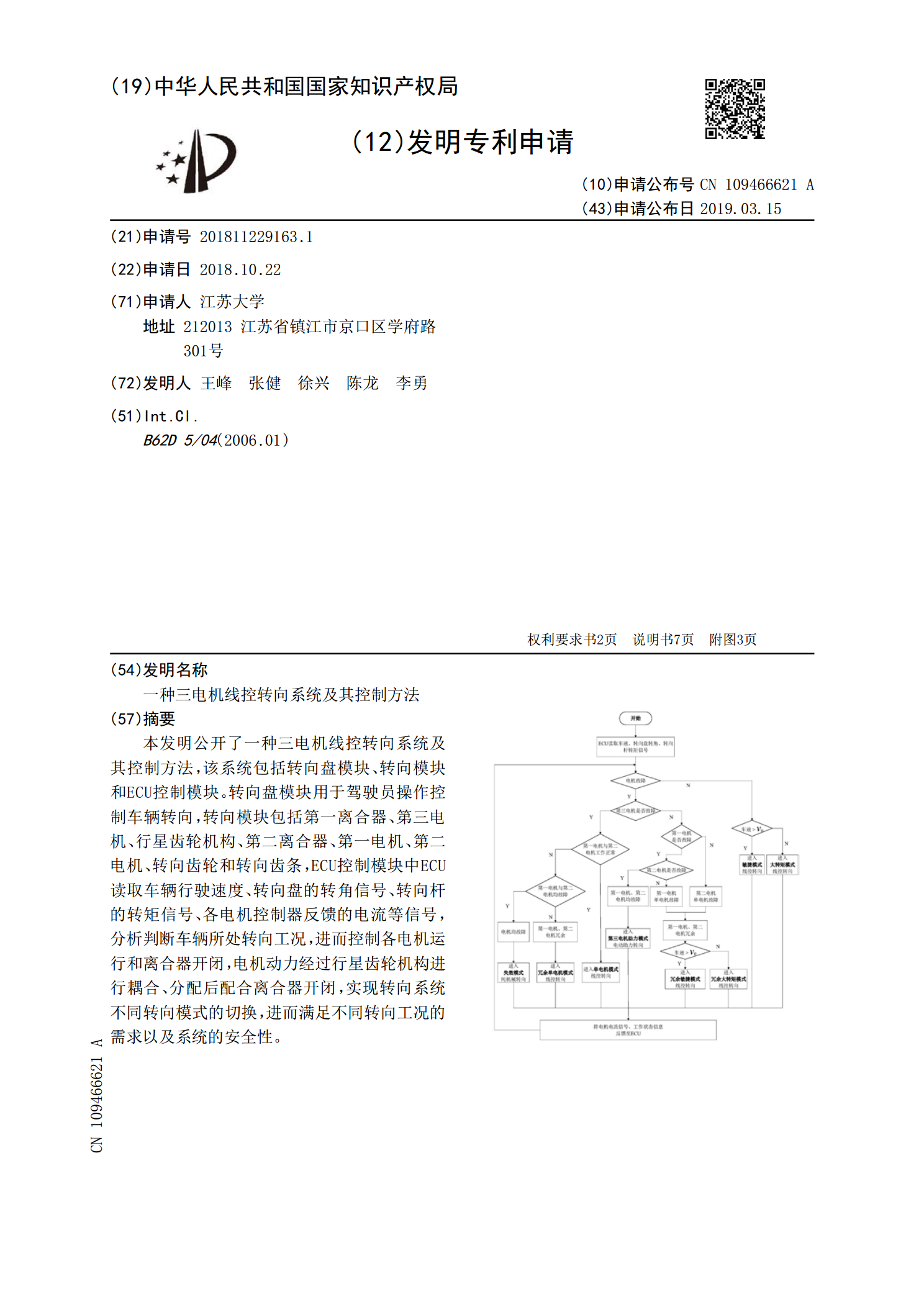
一种三电机线控转向系统及其控制方法.pdf
本发明公开了一种三电机线控转向系统及其控制方法,该系统包括转向盘模块、转向模块和ECU控制模块。转向盘模块用于驾驶员操作控制车辆转向,转向模块包括第一离合器、第三电机、行星齿轮机构、第二离合器、第一电机、第二电机、转向齿轮和转向齿条,ECU控制模块中ECU读取车辆行驶速度、转向盘的转角信号、转向杆的转矩信号、各电机控制器反馈的电流等信号,分析判断车辆所处转向工况,进而控制各电机运行和离合器开闭,电机动力经过行星齿轮机构进行耦合、分配后配合离合器开闭,实现转向系统不同转向模式的切换,进而满足不同转向工况的需