
一种三电机线控转向系统及其控制方法.pdf

琰琬****买买


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三电机线控转向系统及其控制方法.pdf
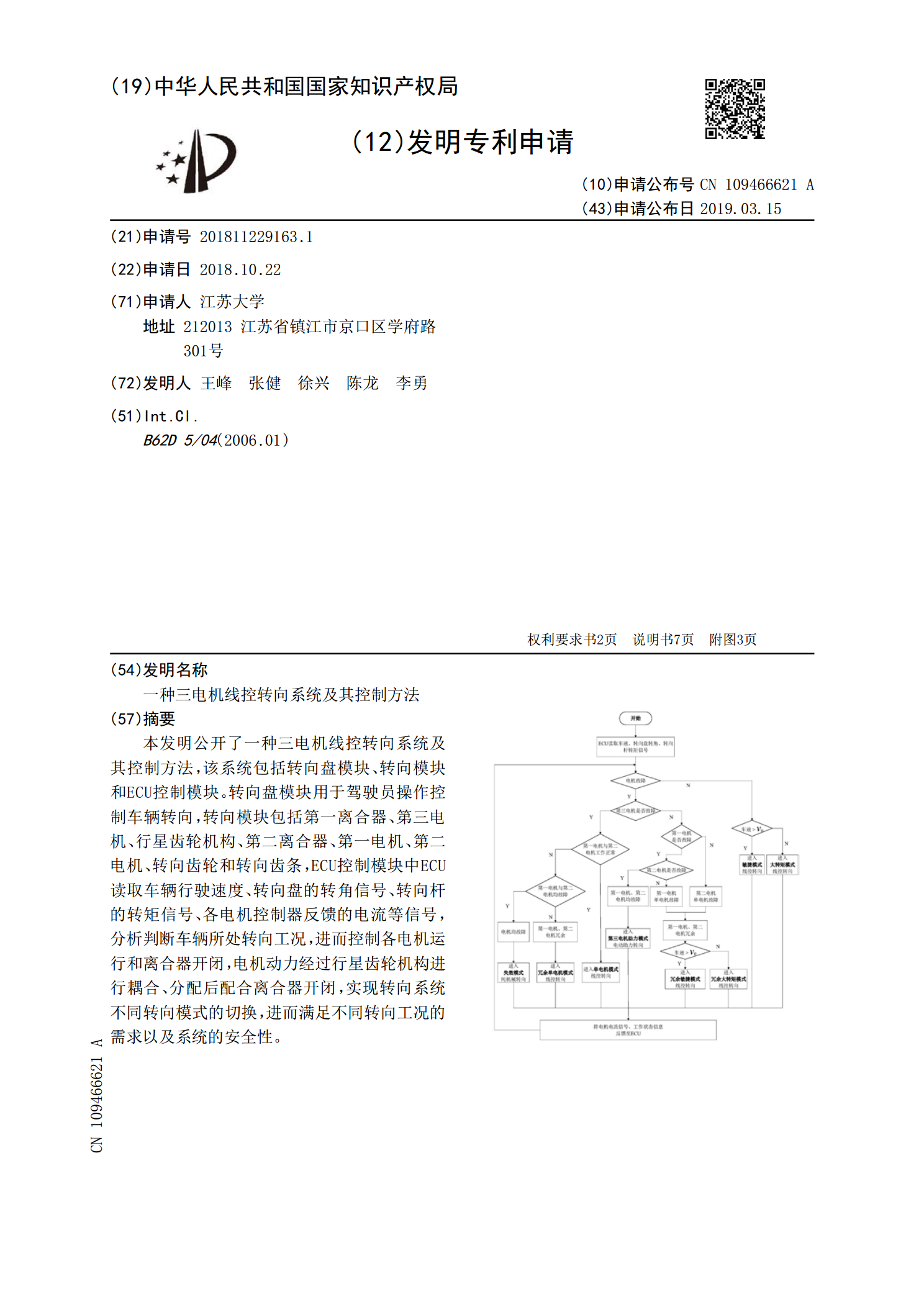
本发明公开了一种三电机线控转向系统及其控制方法,该系统包括转向盘模块、转向模块和ECU控制模块。转向盘模块用于驾驶员操作控制车辆转向,转向模块包括第一离合器、第三电机、行星齿轮机构、第二离合器、第一电机、第二电机、转向齿轮和转向齿条,ECU控制模块中ECU读取车辆行驶速度、转向盘的转角信号、转向杆的转矩信号、各电机控制器反馈的电流等信号,分析判断车辆所处转向工况,进而控制各电机运行和离合器开闭,电机动力经过行星齿轮机构进行耦合、分配后配合离合器开闭,实现转向系统不同转向模式的切换,进而满足不同转向工况的需
一种线控转向系统及其控制方法.pdf
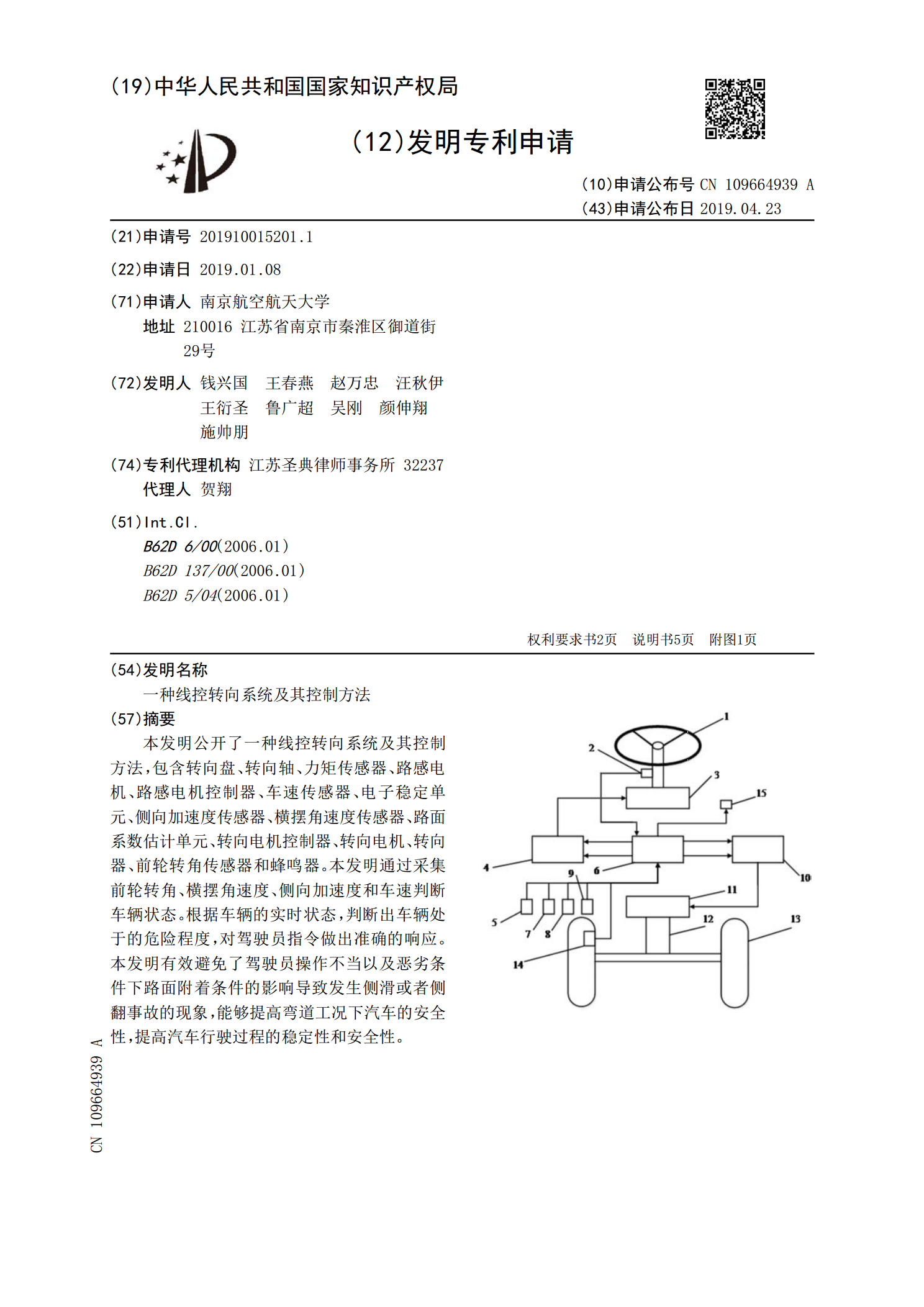
本发明公开了一种线控转向系统及其控制方法,包含转向盘、转向轴、力矩传感器、路感电机、路感电机控制器、车速传感器、电子稳定单元、侧向加速度传感器、横摆角速度传感器、路面系数估计单元、转向电机控制器、转向电机、转向器、前轮转角传感器和蜂鸣器。本发明通过采集前轮转角、横摆角速度、侧向加速度和车速判断车辆状态。根据车辆的实时状态,判断出车辆处于的危险程度,对驾驶员指令做出准确的响应。本发明有效避免了驾驶员操作不当以及恶劣条件下路面附着条件的影响导致发生侧滑或者侧翻事故的现象,能够提高弯道工况下汽车的安全性,提高汽
乘用车多模式电机驱动线控转向系统及其转向控制方法.pdf
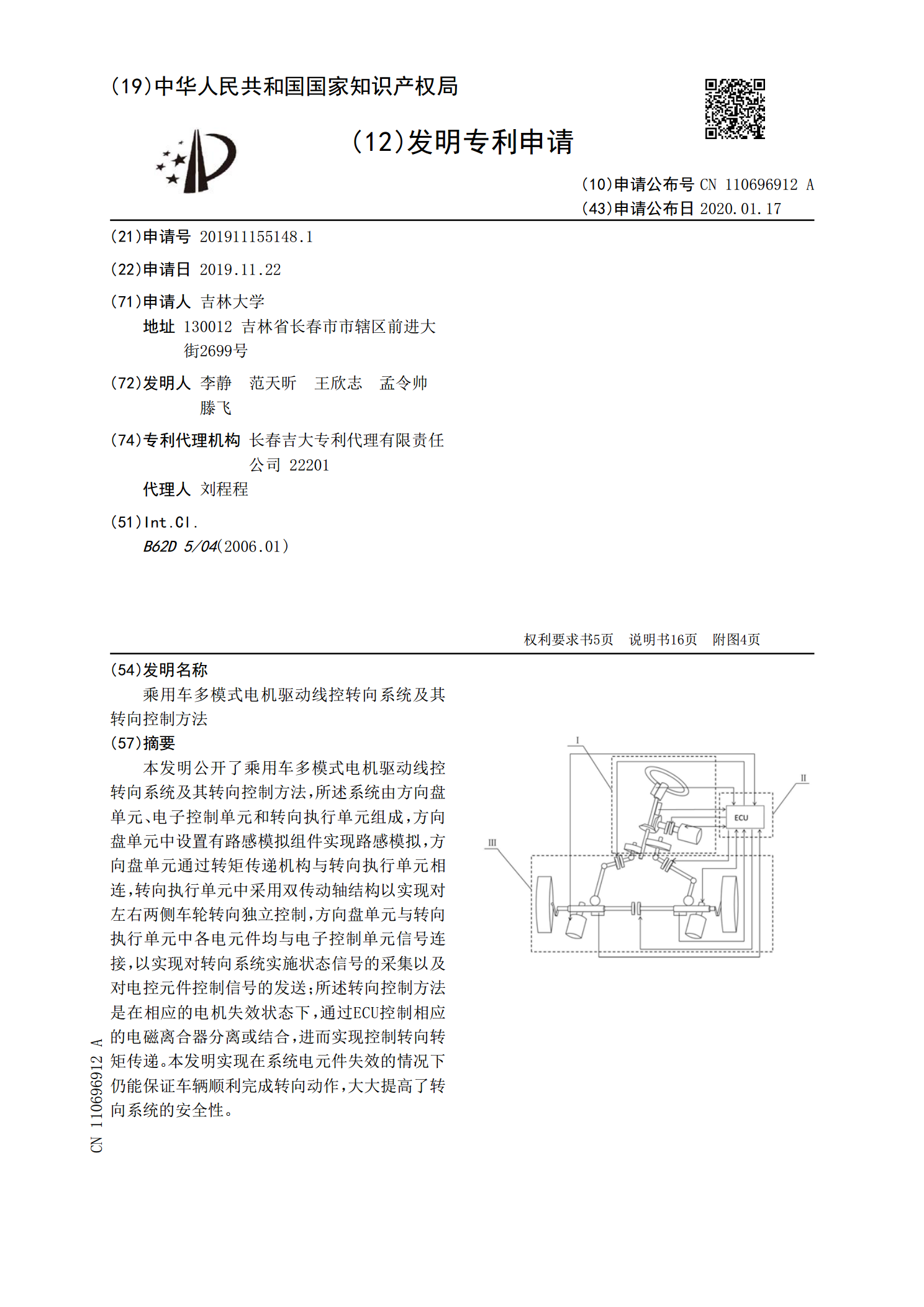
本发明公开了乘用车多模式电机驱动线控转向系统及其转向控制方法,所述系统由方向盘单元、电子控制单元和转向执行单元组成,方向盘单元中设置有路感模拟组件实现路感模拟,方向盘单元通过转矩传递机构与转向执行单元相连,转向执行单元中采用双传动轴结构以实现对左右两侧车轮转向独立控制,方向盘单元与转向执行单元中各电元件均与电子控制单元信号连接,以实现对转向系统实施状态信号的采集以及对电控元件控制信号的发送;所述转向控制方法是在相应的电机失效状态下,通过ECU控制相应的电磁离合器分离或结合,进而实现控制转向转矩传递。本发明
一种双电机线控转向系统及其主动容错控制方法.pdf
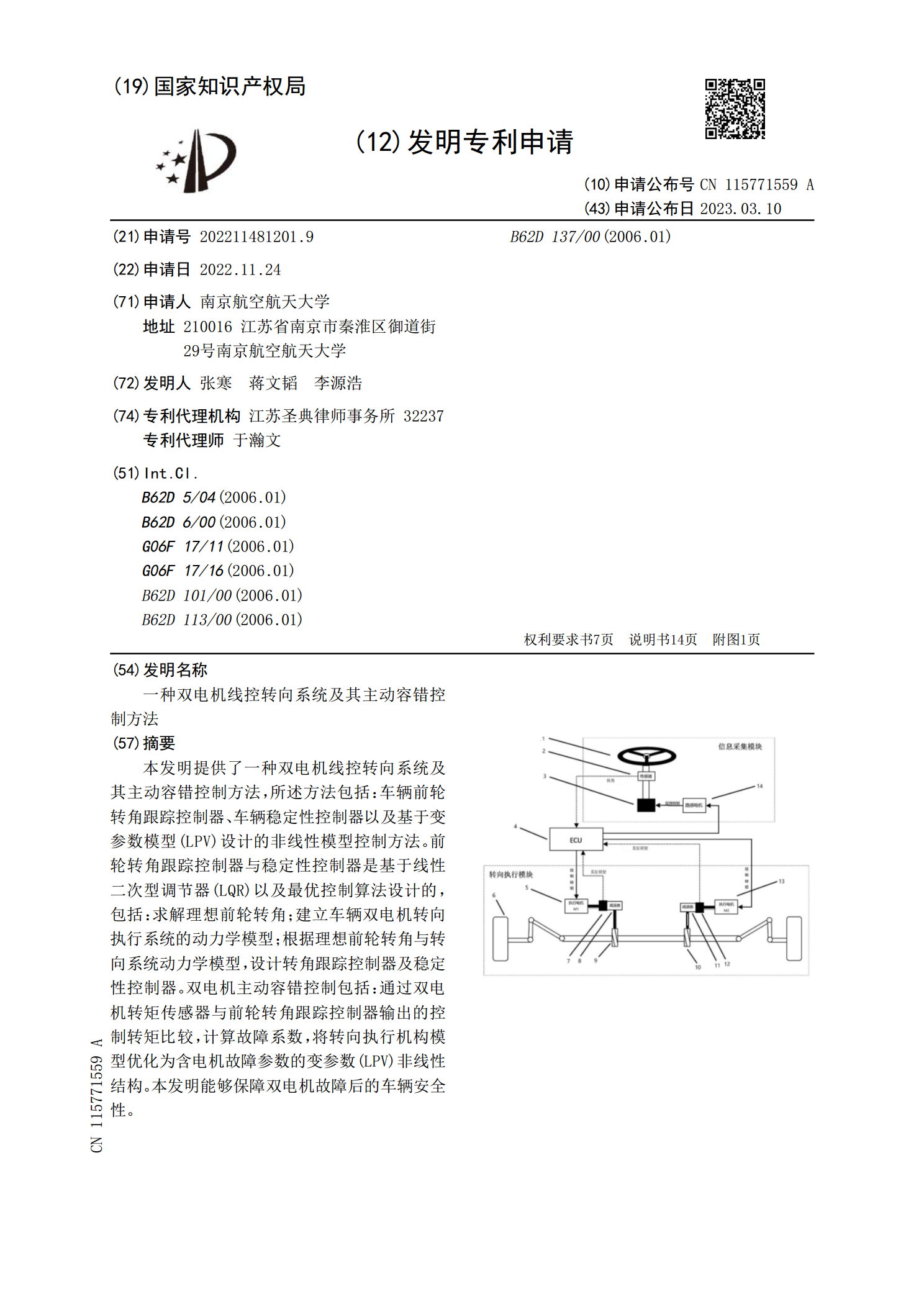
本发明提供了一种双电机线控转向系统及其主动容错控制方法,所述方法包括:车辆前轮转角跟踪控制器、车辆稳定性控制器以及基于变参数模型(LPV)设计的非线性模型控制方法。前轮转角跟踪控制器与稳定性控制器是基于线性二次型调节器(LQR)以及最优控制算法设计的,包括:求解理想前轮转角;建立车辆双电机转向执行系统的动力学模型;根据理想前轮转角与转向系统动力学模型,设计转角跟踪控制器及稳定性控制器。双电机主动容错控制包括:通过双电机转矩传感器与前轮转角跟踪控制器输出的控制转矩比较,计算故障系数,将转向执行机构模型优化为
一种双电机双电源线控转向系统及其容错控制方法.pdf
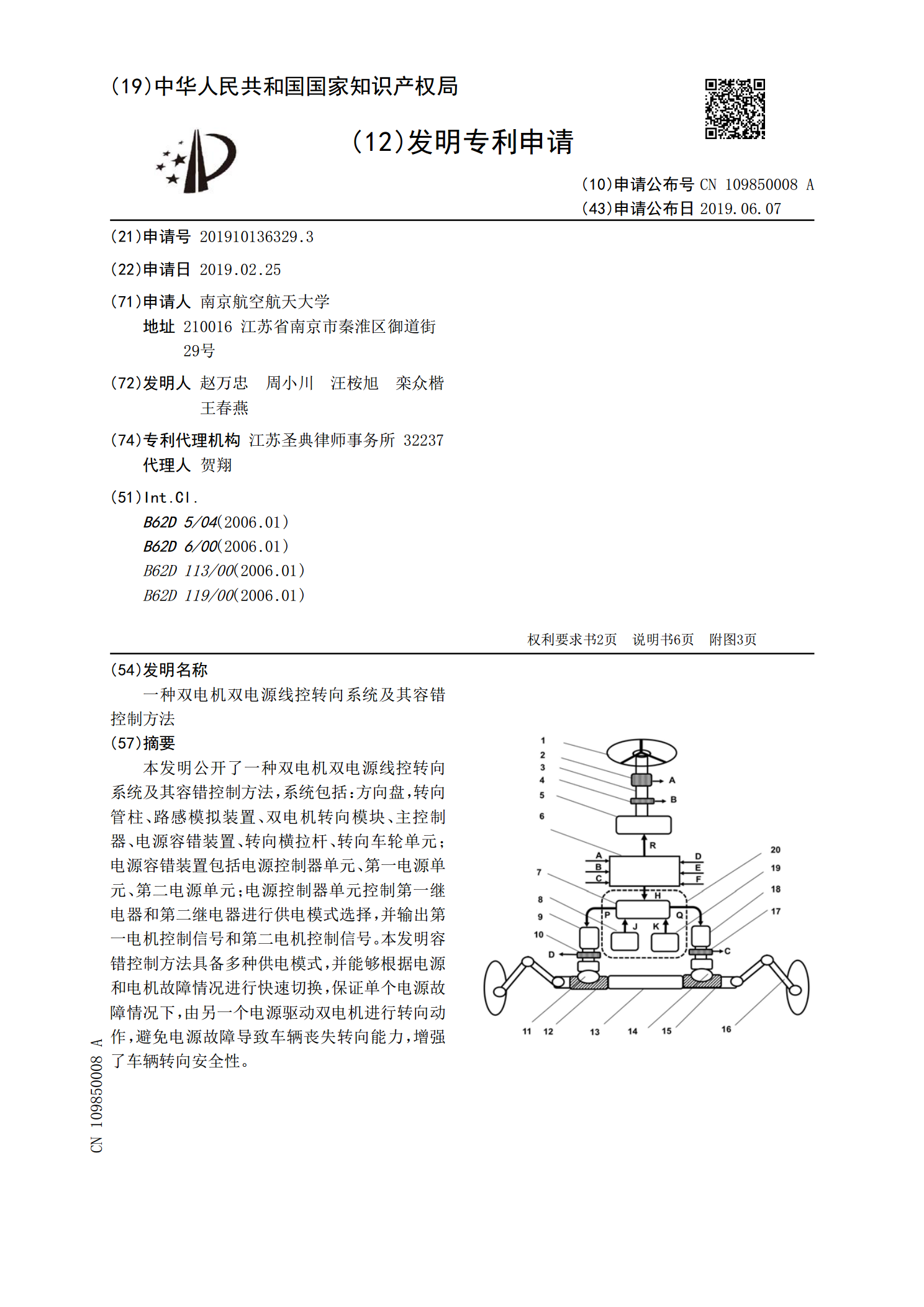
本发明公开了一种双电机双电源线控转向系统及其容错控制方法,系统包括:方向盘,转向管柱、路感模拟装置、双电机转向模块、主控制器、电源容错装置、转向横拉杆、转向车轮单元;电源容错装置包括电源控制器单元、第一电源单元、第二电源单元;电源控制器单元控制第一继电器和第二继电器进行供电模式选择,并输出第一电机控制信号和第二电机控制信号。本发明容错控制方法具备多种供电模式,并能够根据电源和电机故障情况进行快速切换,保证单个电源故障情况下,由另一个电源驱动双电机进行转向动作,避免电源故障导致车辆丧失转向能力,增强了车辆转