
一种注塑机械手取件装置.pdf

一吃****仕龙


1/6
2/6
3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种注塑机械手取件装置.pdf
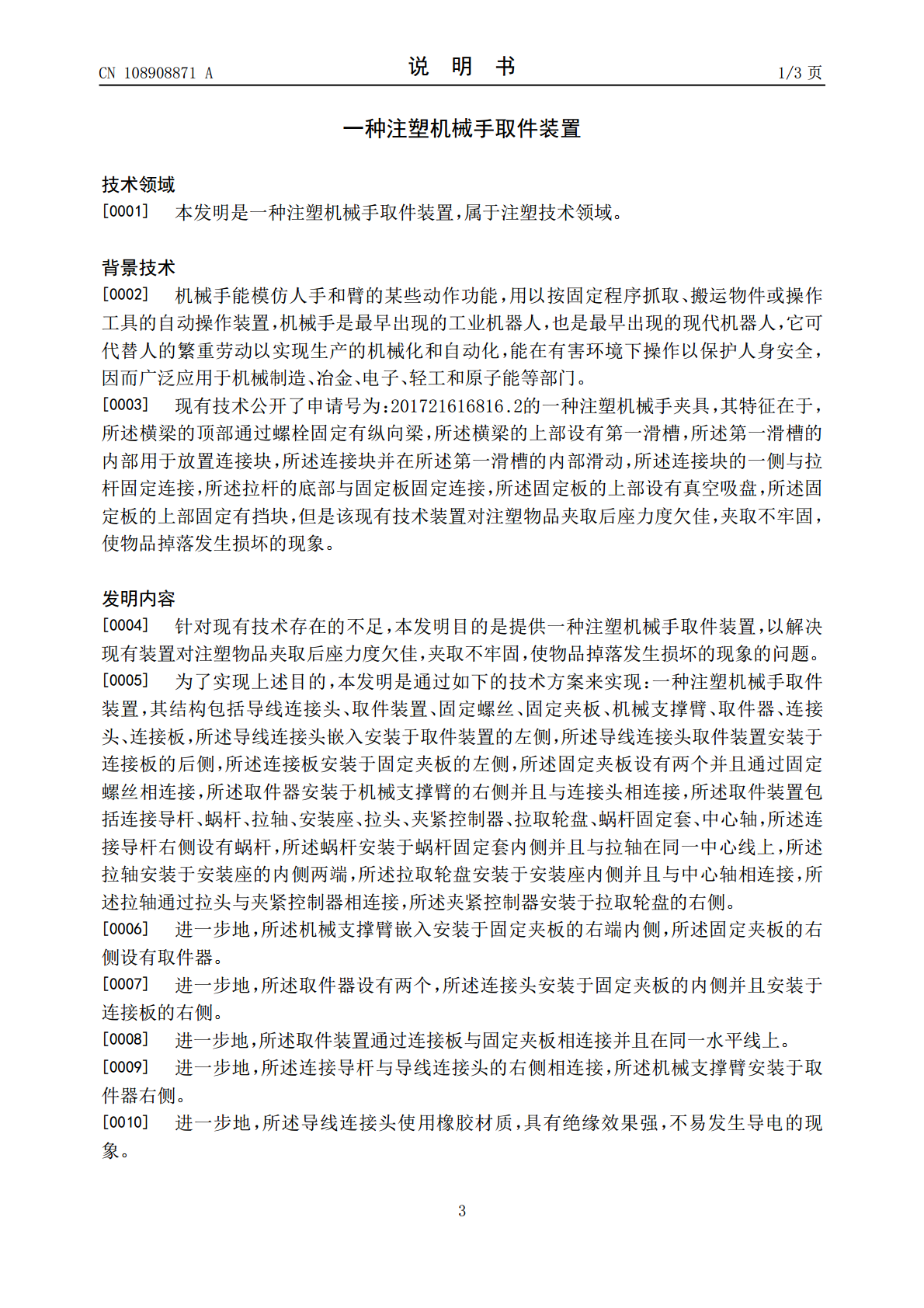
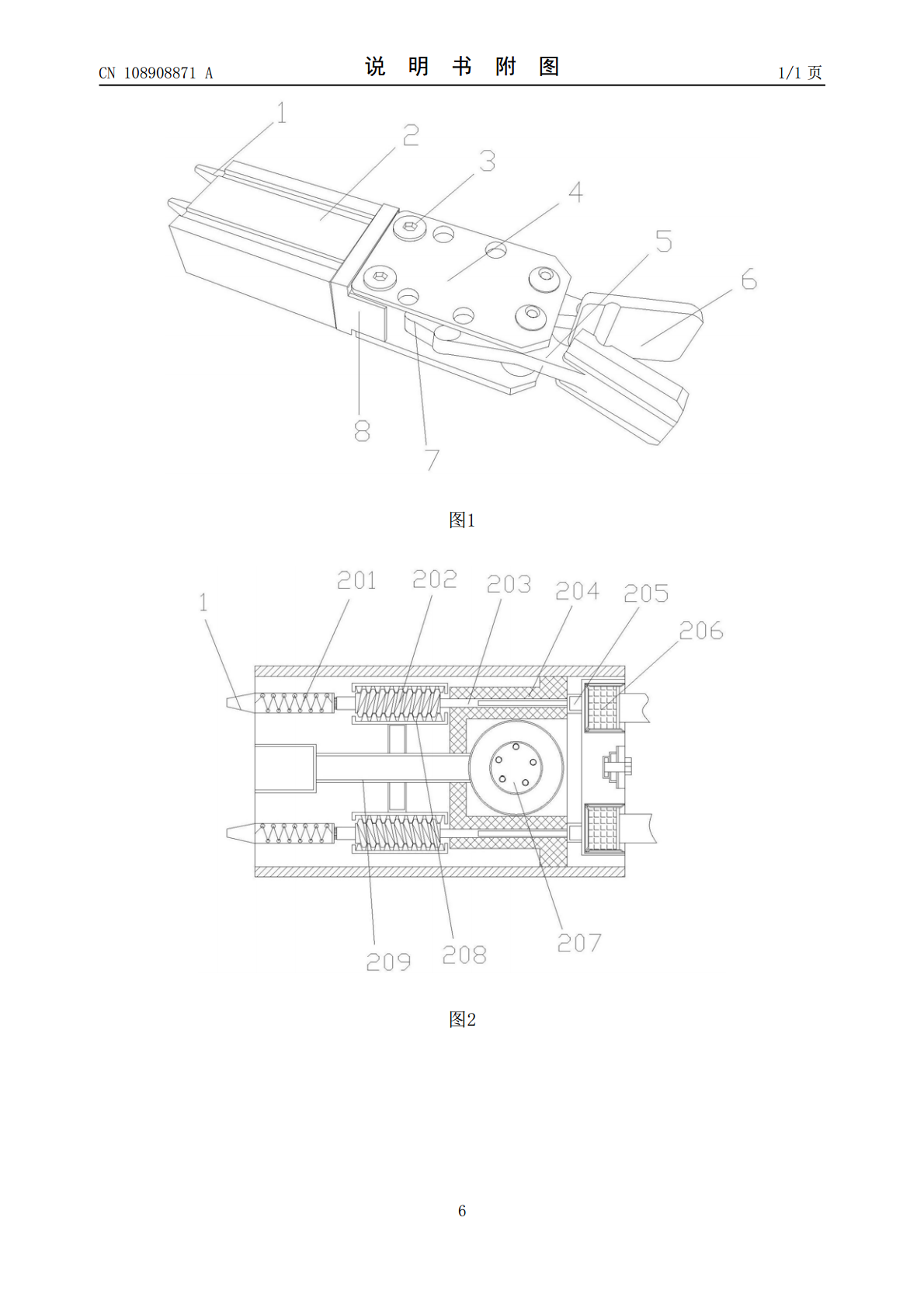
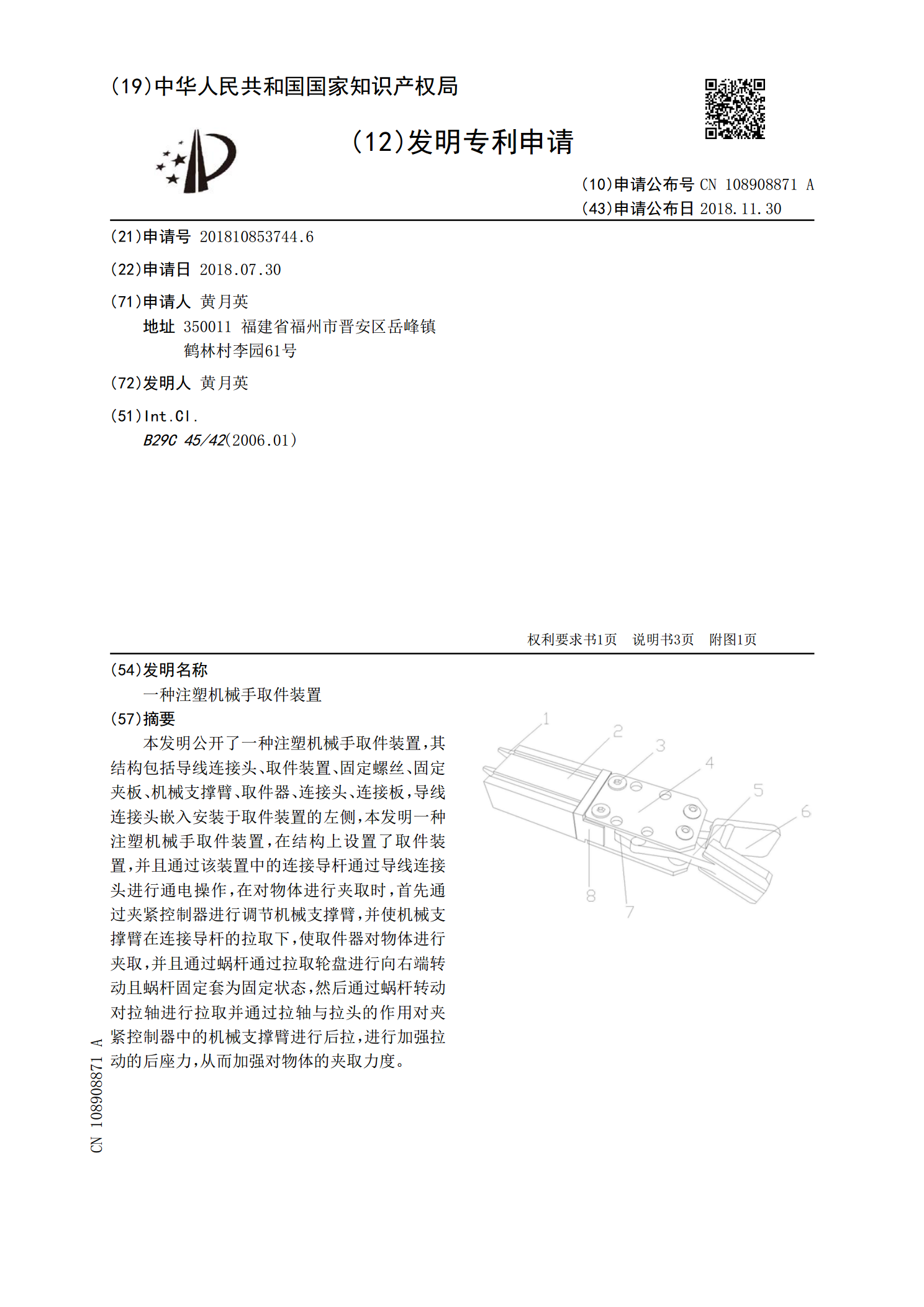
本发明公开了一种注塑机械手取件装置,其结构包括导线连接头、取件装置、固定螺丝、固定夹板、机械支撑臂、取件器、连接头、连接板,导线连接头嵌入安装于取件装置的左侧,本发明一种注塑机械手取件装置,在结构上设置了取件装置,并且通过该装置中的连接导杆通过导线连接头进行通电操作,在对物体进行夹取时,首先通过夹紧控制器进行调节机械支撑臂,并使机械支撑臂在连接导杆的拉取下,使取件器对物体进行夹取,并且通过蜗杆通过拉取轮盘进行向右端转动且蜗杆固定套为固定状态,然后通过蜗杆转动对拉轴进行拉取并通过拉轴与拉头的作用对夹紧控制器

一种注塑取件机械手.pdf
一种注塑取件机械手,解决现有技术存在的操作人员劳动强度大,取件效率低,作业成本高,取件操作过程中易磕碰,影响产品品质的问题。包括固定支架,固定支架上设置有两组用于勾住零件背面的气动勾手机构,两组气动勾手机构之间设置有若干组用于夹固零件浇口的气动夹手机构,气动勾手机构的外侧、固定支架的周边,还设置有若干组用于吸固住零件正面的吸取机构,固定支架通过机械抓手连接部与机械手驱动臂相连。其设计合理,结构紧凑,能够对注塑饰件进行自动抓取,劳动强度低,生产效率高,并且,可有效保证产品质量,实用性强,使用可靠性好。
一种多点式注塑件机械手负压拾取装置.pdf
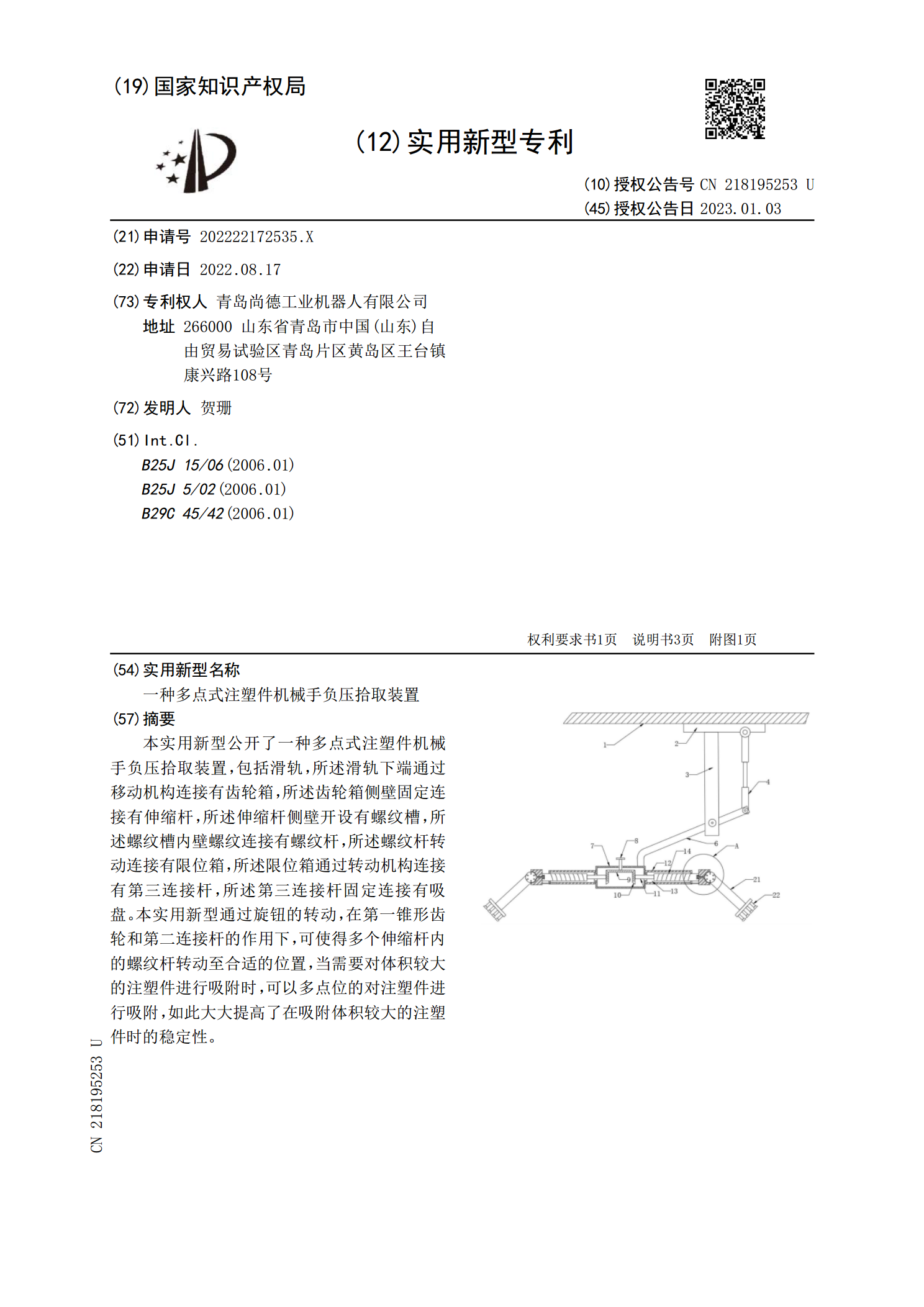
本实用新型公开了一种多点式注塑件机械手负压拾取装置,包括滑轨,所述滑轨下端通过移动机构连接有齿轮箱,所述齿轮箱侧壁固定连接有伸缩杆,所述伸缩杆侧壁开设有螺纹槽,所述螺纹槽内壁螺纹连接有螺纹杆,所述螺纹杆转动连接有限位箱,所述限位箱通过转动机构连接有第三连接杆,所述第三连接杆固定连接有吸盘。本实用新型通过旋钮的转动,在第一锥形齿轮和第二连接杆的作用下,可使得多个伸缩杆内的螺纹杆转动至合适的位置,当需要对体积较大的注塑件进行吸附时,可以多点位的对注塑件进行吸附,如此大大提高了在吸附体积较大的注塑件时的稳定性。

注塑机取件机械手的设计.docx
编号本科生结业论文注塑机取件机器手设计DesignOfManipulatorForInjection学生姓名徐天专业机器电子工程学号090321218指导教师褚剑峰学院机电工程学院二〇一三年六月结业设计(论文)原创答应书1.本人答应:所呈交的结业设计(论文)《注塑机取件机器手设计》,是认真学习理解学校的《长春理工大学本科结业设计(论文)事情条例》后,在西席的指导下,保质保量独立地完成了任务书中划定的内容,不弄虚作假,不抄袭别人的事情内容。2.本人在结业设计(论文)中引用他人的看法和研究结果,均在文中加以注

注塑机取件机械手的设计.docx
编号本科生毕业论文注塑机取件机械手设计DesignOfManipulatorForInjection学生姓名徐天专业机械电子工程学号090321218指导教师褚剑峰学院机电工程学院二〇一三年六月长春理工大学本科毕业论文毕业设计(论文)原创承诺书1.本人承诺:所呈交的毕业设计(论文)《注塑机取件机械手设计》,是认真学习理解学校的《长春理工大学本科毕业设计(论文)工作条例》后,在教师的指导下,保质保量独立地完成了任务书中规定的内容,不弄虚作假,不抄袭别人的工作内容。2.本人在毕业设计(论文)中引用他人的观点和