
机械臂回转底座.pdf

含平****ng

1/5

2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械臂回转底座.pdf
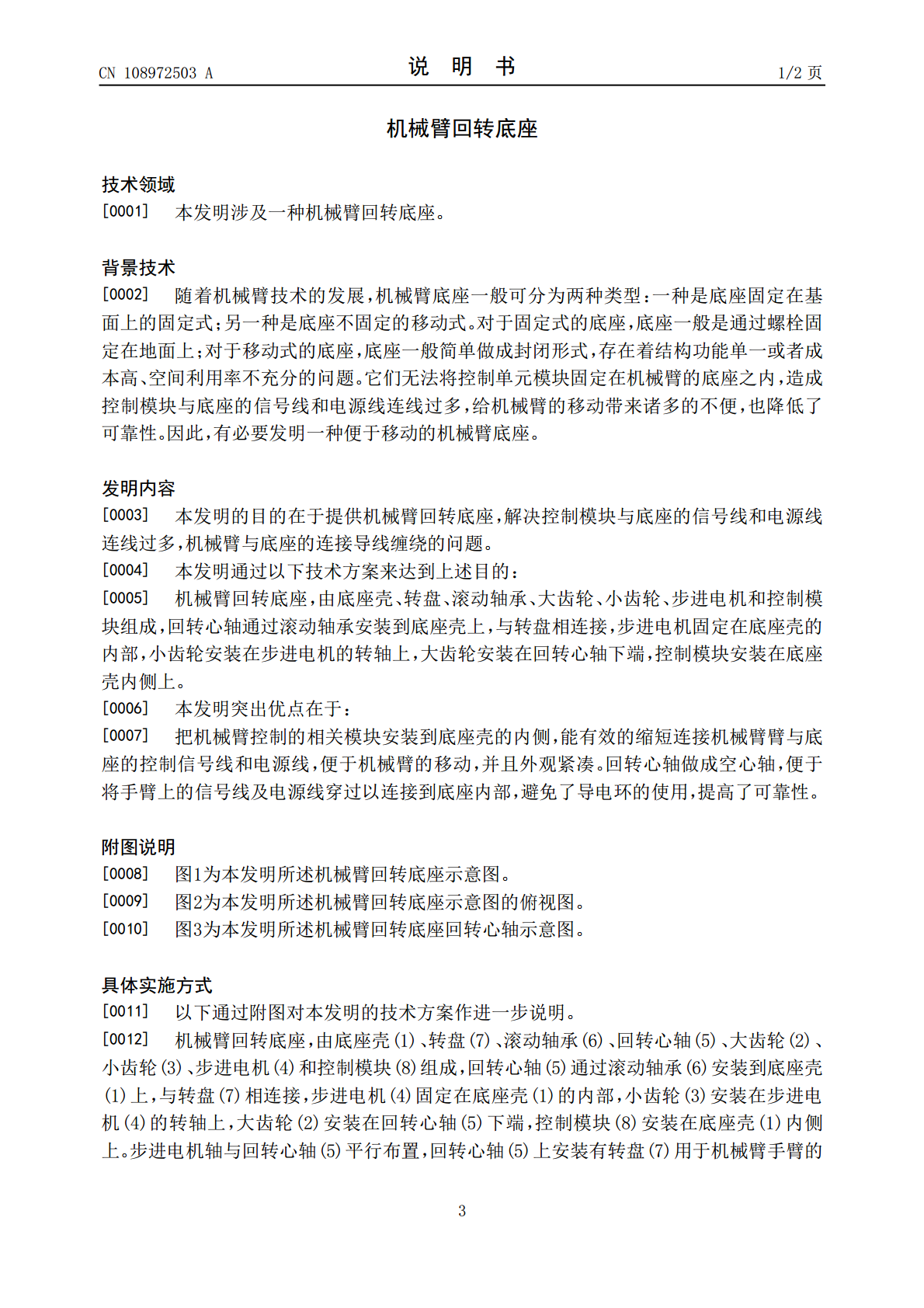
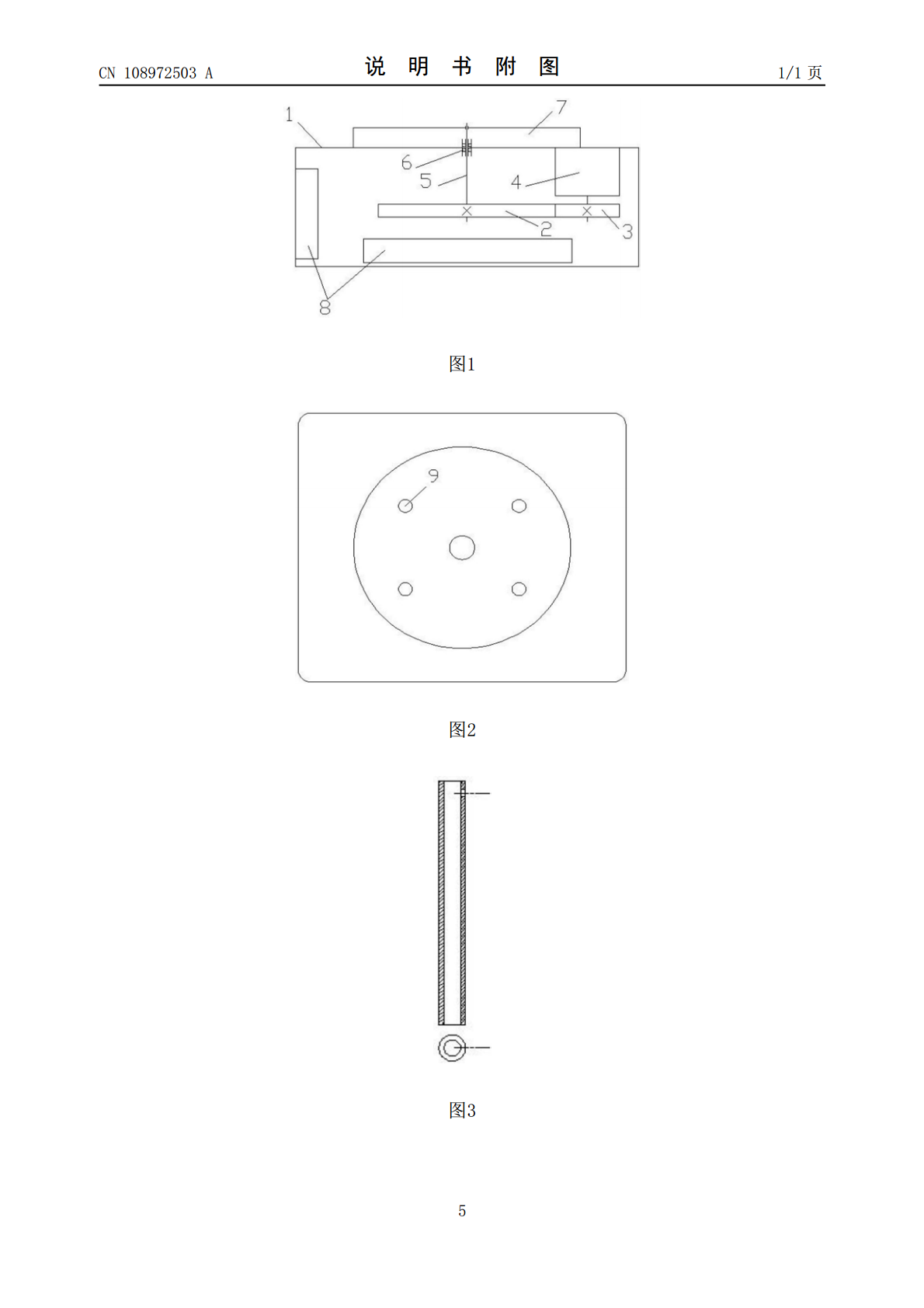
本发明机械臂回转底座,由底座壳、转盘、滚动轴承、大齿轮、小齿轮、步进电机和控制模块组成,回转心轴通过滚动轴承安装到底座壳上,与转盘相连接,步进电机固定在底座壳的内部,小齿轮安装在步进电机的转轴上,大齿轮安装在回转心轴下端,控制模块安装在底座壳内侧上。把机械手控制的相关模块安装到底座壳的内侧,能有效的缩短连接机械手臂与底座的控制信号线和电源线,便于机械手的移动,并且外观紧凑。回转心轴做成空心轴,便于将手臂上的信号线及电源线穿过以连接到底座内部,避免了导电环的使用,提高了可靠性。

机械臂回转设备.pdf
本发明涉及一种机械臂回转设备,该设备由回转驱动部分、法兰连接部分及壳体部分连接组成;所述回转驱动部分包括伺服电机、减速机、连接套、隔套、止动垫及平键;所述法兰连接部分包括过渡法兰及螺栓;所述壳体部分包括壳体及壳体端盖;所述回转驱动部分整体通过螺栓与壳体部分连接。该设备采用伺服电机与减速机直联,减速机输出轴与机械臂或另一回转关节直联,形成多关节直联设备。其结构简单,性能可靠,可在组装时按用户需求与其它关节或机械臂实现模块式组合。由于不采用传统的机械臂回转设备使用的齿轮、齿形带等部件,有效避免了设备长时间重复

折臂式铁钻工底座回转机构设计分析.docx
折臂式铁钻工底座回转机构设计分析摘要:本文主要探讨折臂式铁钻工底座回转机构的设计分析。结合实际应用需求,分析了回转机构的主要功能和特点,并在机械设计原理和工程实践经验的基础上,详细阐述了回转机构的设计方案和实现过程。关键词:折臂式铁钻工底座;回转机构;设计分析;实现过程;机械设计原理。一、引言随着现代工业的发展,机械设备的升级换代日趋迅速。在这个过程中,各种先进的机械设备和生产工具得到广泛应用,其中折臂式铁钻工底座回转机构是一种常见的工业设备。它在数控机床和组合式铣床等加工设备中,具有重要的应用价值。折臂
一种机械臂的移动连接底座.pdf
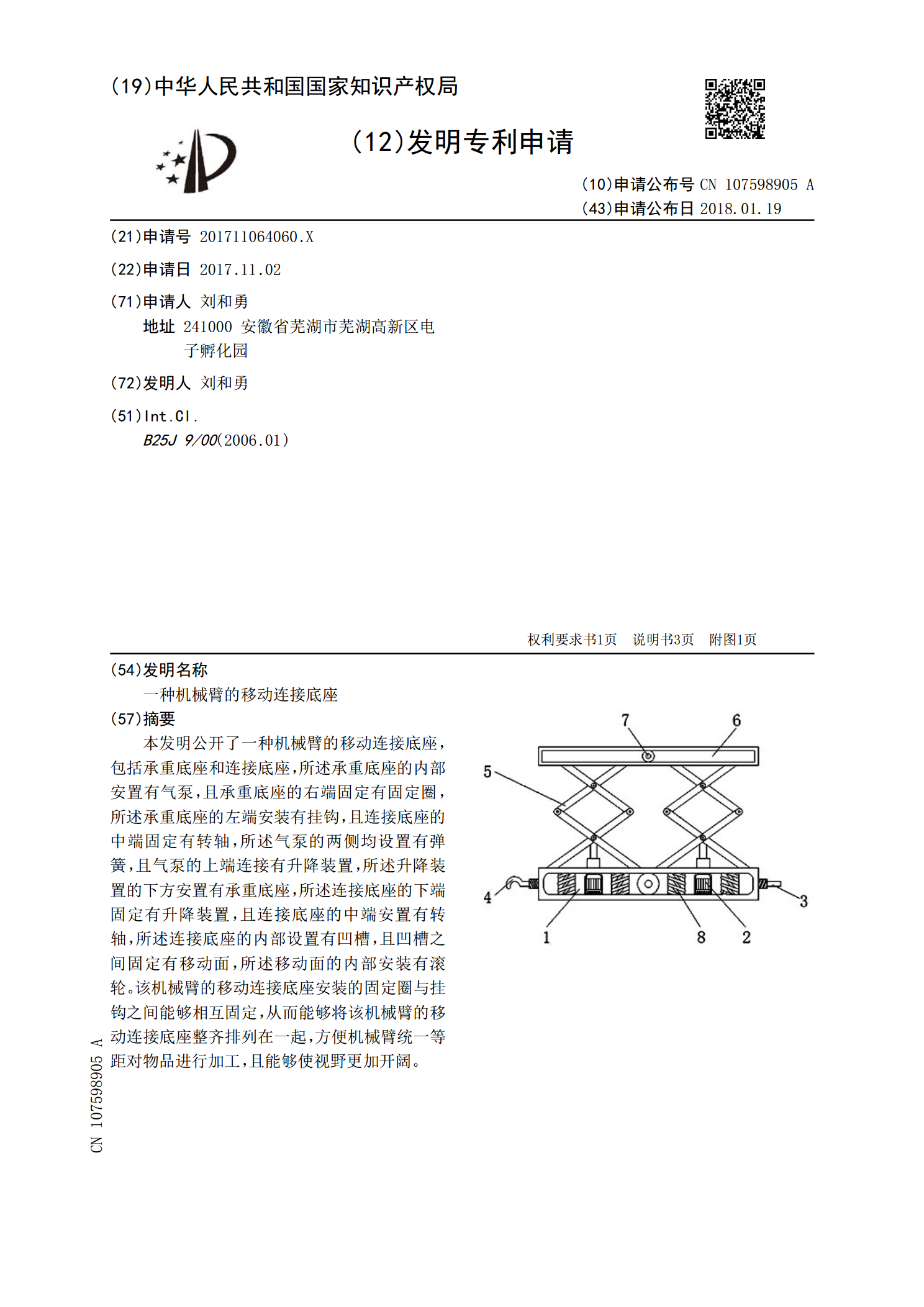
本发明公开了一种机械臂的移动连接底座,包括承重底座和连接底座,所述承重底座的内部安置有气泵,且承重底座的右端固定有固定圈,所述承重底座的左端安装有挂钩,且连接底座的中端固定有转轴,所述气泵的两侧均设置有弹簧,且气泵的上端连接有升降装置,所述升降装置的下方安置有承重底座,所述连接底座的下端固定有升降装置,且连接底座的中端安置有转轴,所述连接底座的内部设置有凹槽,且凹槽之间固定有移动面,所述移动面的内部安装有滚轮。该机械臂的移动连接底座安装的固定圈与挂钩之间能够相互固定,从而能够将该机械臂的移动连接底座整齐排

一种轻量级的桌面多轴机械臂及其机械臂的底座.pdf
本发明提供一种轻量级的桌面多轴机械臂及其机械臂的底座,包括底座、基座、机械臂,底座底部四角处固定连接有用于支撑整体结构的支脚,且底座四周侧壁上开设有连接槽,同时连接槽上下两端内壁中开设有限位槽,底座内部开设有用于存储液体的中空腔体,且中空腔体四周内壁上转动连接有延伸至连接槽内部的传输轴,基座活动连接于连接槽内部,且基座靠近连接槽的一端与传输轴啮合,同时机械臂转动连接于基座顶部。本发明提供一种轻量级的桌面多轴机械臂及其机械臂的底座为解决机械臂在长时间运作后需要定期进行维护保养,费时费力且影响加工效率,同时在